11.1 INTRODUÇÃO
11.1.1 Desvendando Formas: A Mágica da Parametrização
Vimos que, ao parametrizar curvas , temos muito mais controle do que ao olhar para curvas dadas por equações. Seria difícil descrever uma hélice em termos de equações, por exemplo. Para superfícies também, é bom ter tantas coordenadas quanto a dimensão. Vivemos em uma esfera bidimensional , mas não usamos as coordenadas para descrever um ponto na superfície. Usamos duas coordenadas (longitude e latitude). Euler usou primeiro a parametrização onde , são ângulos. Você pode verificar rapidamente que soma , de modo que, quaisquer que sejam os ângulos , escolhidos, sempre estamos na esfera.
11.2 AULA
11.2.1 Jacobianos e Área de Superfície
Um mapa é chamado de parametrização. Vimos mapas de para , que eram curvas. Depois vimos mapas que eram mudanças de coordenadas. Em cada caso definimos a matriz Jacobiana . No caso da curva , era a velocidade d r(t)=r^{\prime}(t). No caso de mudanças de coordenadas, a matriz Jacobiana foi usada para obter o fator de distorção de volume . Hoje, olhamos para o caso . Em particular para , . Como no caso das curvas, usamos a letra para descrever o mapa. A imagem de um mapa é então uma superfície -dimensional em . O fator de distorção definido como será usado mais tarde para calcular a área da superfície.1
11.2.2 Superfícies e Mapas
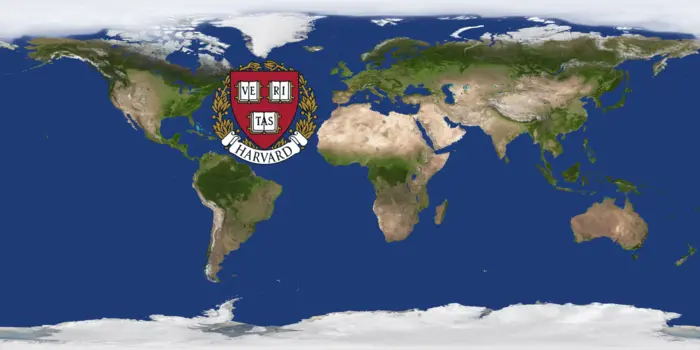
Discutimos aqui principalmente o caso e , já que nós mesmos somos feitos de superfícies bidimensionais, como células, membranas, pele ou tecido. Um mapa , escrito como define uma superfície bidimensional. Para economizar espaço, também escrevemos simplesmente . Em computação gráfica, o é chamado de mapa . O plano é onde você desenha uma textura. O mapa a coloca sobre a superfície. Em geografia, o mapa é chamado (surpresa!) de mapa. Vários mapas definem um atlas. As curvas e são chamadas de curvas de grade.
11.2.3 Uma Olhada na Parametrização de Esferas e Elipsoides
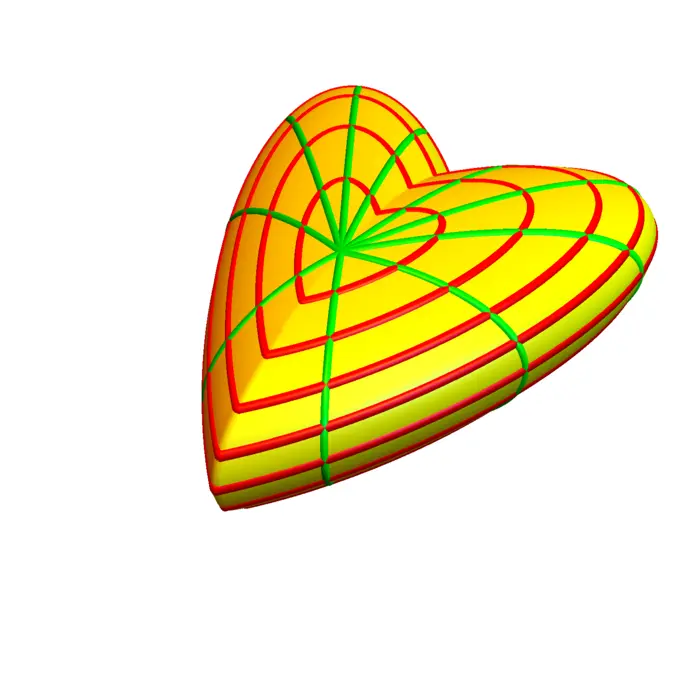
A parametrização produz a esfera . A esfera completa tem , . Modificando as coordenadas, obtemos um elipsoide satisfazendo . Permitindo que sejam funções de , obtemos "esferas irregulares" como
11.2.4 Planos e Curvas de Grade
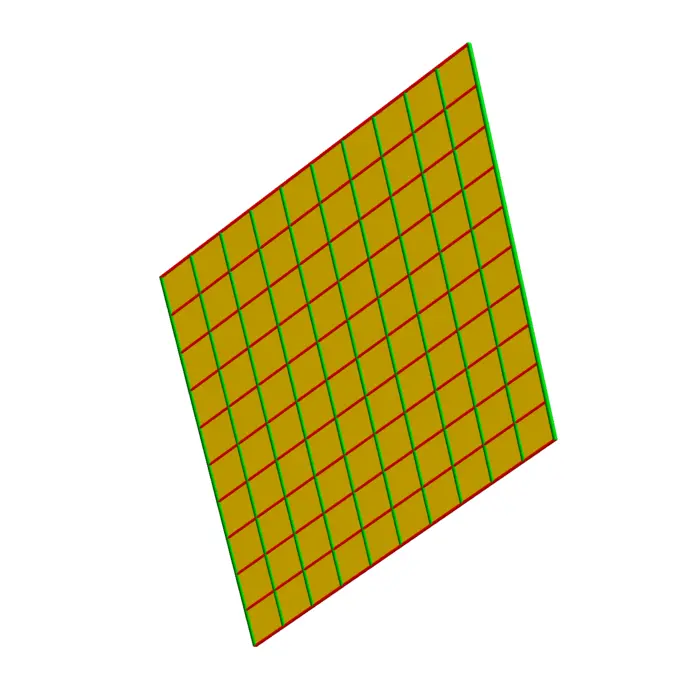
Planos são descritos por mapas lineares com e . O mapa Jacobiano é . Sejam os dois vetores coluna de . Na verdade, é uma abreviação para , que é o vetor velocidade da curva de grade .
11.2.5 Exemplo de Parametrização de Plano
Um exemplo é a parametrização . Neste caso e Vemos que tem determinante . Também temos
11.2.6 Revelando o Fator de Distorção: Uma Conexão com o Produto Vetorial
O cálculo anterior sugere uma relação entre o vetor normal e a forma fundamental . Em três dimensões, o fator de distorção de uma parametrização pode de fato sempre ser reescrito usando o produto vetorial:
Teorema 1. .
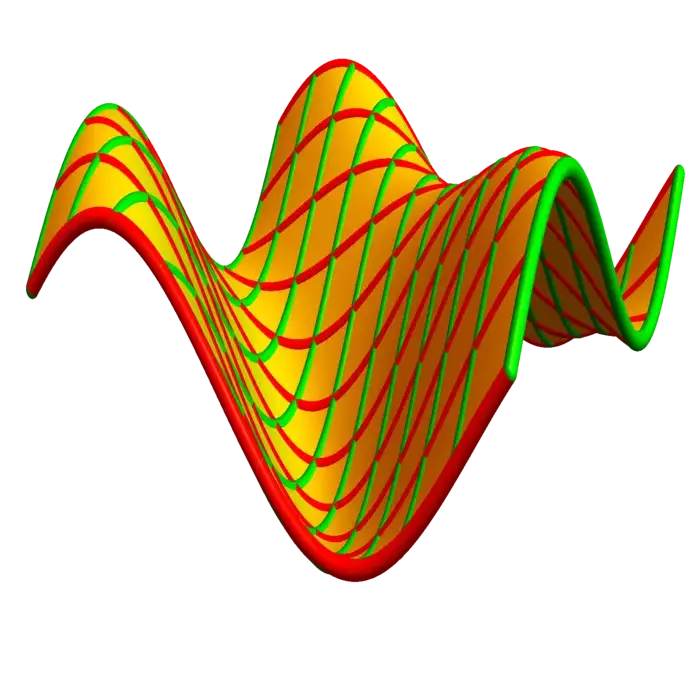
Prova. Como a identidade é a identidade de Cauchy-Binet que se reduz a , onde é o ângulo entre e . Este é o ângulo entre as curvas de grade que você vê nas figuras. ◻
11.3 EXEMPLOS
Exemplo 1. Para a esfera unitária e : \begin{aligned} g&=A^{T}A\\ &=\begin{bmatrix} \cos (\phi) \cos (\theta) & \cos (\phi) \sin (\theta) & -\sin (\phi) \\ -\sin (\phi) \sin (\theta) & \sin (\phi) \cos (\theta) & 0 \end{bmatrix} \begin{bmatrix} \cos (\phi) \cos (\theta) & -\sin (\phi) \sin (\theta) \\ \cos (\phi) \sin (\theta) & \sin (\phi) \cos (\theta) \\ -\sin (\phi) & 0 \end{bmatrix} \end{aligned} Isso é e é o fator de distorção.
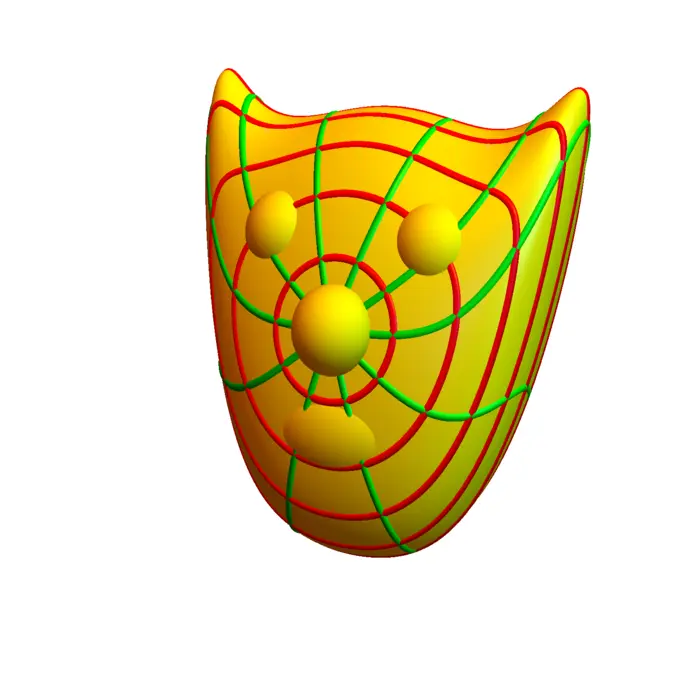
Exemplo 2. Uma classe importante de superfícies são os gráficos . Sua parametrização mais natural é , onde o mapa simplesmente eleva a parte inferior para a versão elevada. Um exemplo é o paraboloide elíptico e o paraboloide hiperbólico . Poderíamos, é claro, também ter escrito .
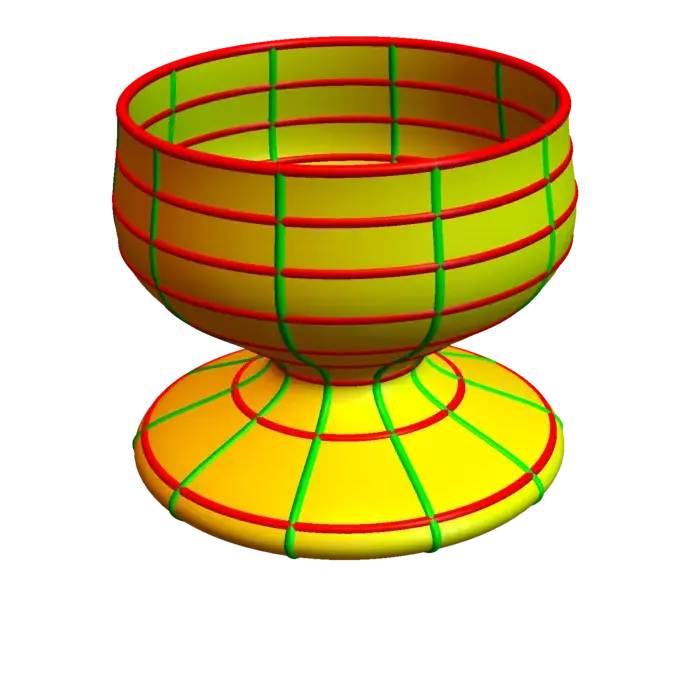
Exemplo 3. Uma superfície de revolução é parametrizada como Note que podemos usar quaisquer variáveis. Neste caso, , são usadas. Um exemplo é o cone ou o hiperboloide de uma folha
Exemplo 4. O toro é dado em coordenadas cilíndricas como . Podemos parametrizá-lo usando o ângulo polar e o ângulo polar centrado no centro do círculo como Ambos os ângulos e variam de a . Vemos agora também a relação com as coordenadas torais.
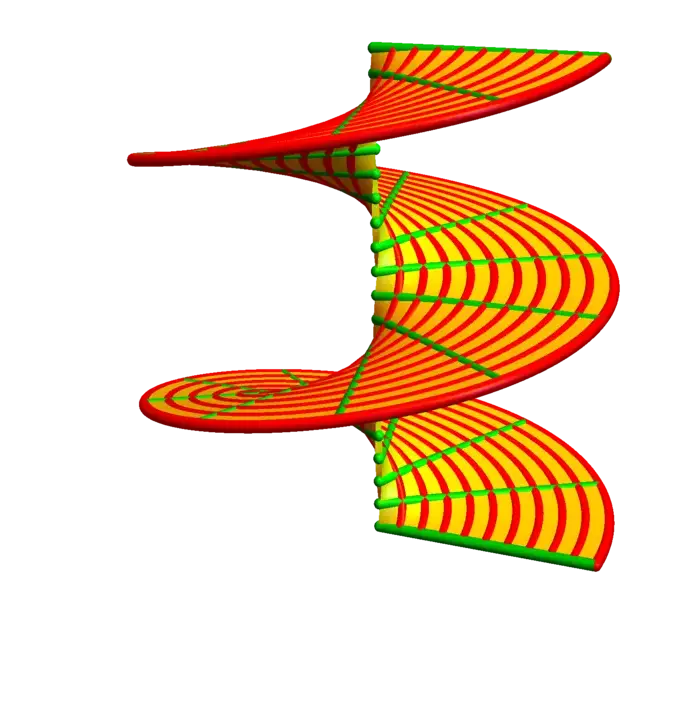
Exemplo 5. O helicoide é a superfície que você vê como uma escada ou parafuso. A parametrização é . Como podemos entender isso? A chave é olhar para as curvas de grade. Se , obtemos uma curva que identificamos como uma hélice. Por outro lado, se você fixar , então você obtém linhas.
11.3.1 Observação: Tensores Métricos e Geometria Riemanniana
A primeira forma fundamental também é chamada de tensor métrico. Na geometria Riemanniana, considera-se uma variedade equipada com uma métrica . O caso mais simples é quando vem de uma parametrização, como fizemos aqui. Na física, sabemos que é a massa que deforma o espaço-tempo. A quantidade é um análogo multiplicativo de . Para uma matriz quadrada definida positiva invertível , veremos mais tarde a identidade que ilustra como tanto o determinante quanto o traço são quantidades numéricas fundamentais derivadas de uma matriz. O traço é aditivo por causa de e o determinante é multiplicativo como veremos mais tarde.
11.3.2 Maneiras de Representar uma Variedade
Para resumir, vimos até agora que existem duas maneiras fundamentalmente diferentes de descrever uma variedade. A primeira é escrevê-la como uma superfície de nível que é um núcleo de um mapa . A segunda é escrevê-la como a imagem de algum mapa .
11.4 ILUSTRAÇÃO



EXERCÍCIOS
Exercício 1. Parametrize a parte superior do hiperboloide de duas folhas , como uma superfície de revolução.
Exercício 2.
- Parametrize o plano usando um mapa .
- Agora encontre a matriz e compute assim como o fator de distorção .
- Também compute , e e então compute . Você deve obter o mesmo número.
Exercício 3. Dada uma parametrização do -toro, encontre a equação implícita que descreve este toro.
Exercício 4. Parametrize o paraboloide hiperbólico . Qual é a primeira forma fundamental que é \begin{aligned} g = \begin{bmatrix} r_{x} \cdot r_{x} & r_{x} \cdot r_{y} \\ r_{y} \cdot r_{x} & r_{y} \cdot r_{y} \end{bmatrix}? \end{aligned} Qual é o fator de distorção ?
Exercício 5. A matriz também é chamada de primeira forma fundamental. Se é uma parametrização do espaço-tempo então é o tensor métrico do espaço-tempo. As entradas da matriz aparecem na relatividade geral. Por algumas razões, os físicos usam símbolos gregos para acessar as entradas da matriz. Eles escrevem para a entrada na linha e coluna . Isso aparece, por exemplo, nas equações de campo de Einstein Nós apenas queremos que você pesquise a equação e diga, para cada uma das variáveis, como é chamada e se é uma matriz, uma função escalar ou uma constante.
- Distinga e em . Elas só coincidem para .↩︎