Table des matières
11.1 INTRODUCTION
11.1.1 Dérouler des formes : La magie de la paramétrisation
Nous avons vu que lorsque nous paramétrons des courbes , nous avons beaucoup plus de contrôle que lorsque nous regardons des courbes données par des équations. Il serait difficile de décrire une hélice en termes d'équations par exemple. Pour les surfaces également, il est bon d'avoir autant de coordonnées que la dimension. Nous vivons sur une sphère bidimensionnelle mais nous n'utilisons pas les coordonnées pour décrire un point sur la surface. Nous utilisons deux coordonnées, longitude et latitude. Euler a d'abord utilisé la paramétrisation où , sont des angles. Vous pouvez vérifier rapidement que donne , de sorte que quels que soient les angles , choisis, nous sommes toujours sur la sphère.
11.2 COURS
11.2.1 Jacobiennes et aire de surface
Une application est appelée une paramétrisation. Nous avons vu des applications de dans , qui étaient des courbes. Ensuite, nous avons vu des applications qui étaient des changements de coordonnées. Dans chaque cas, nous avons défini la matrice jacobienne . Dans le cas de la courbe , c'était la vitesse d r(t)=r^{\prime}(t). Dans le cas des changements de coordonnées, la matrice jacobienne a été utilisée pour obtenir le facteur de distorsion volumique . Aujourd'hui, nous examinons le cas . En particulier , . Comme dans le cas des courbes, nous utilisons la lettre pour décrire l'application. L'image d'une application est alors une surface de dimension dans . Le facteur de distorsion défini par sera utilisé plus tard pour calculer l'aire de la surface.1
11.2.2 Surfaces et applications
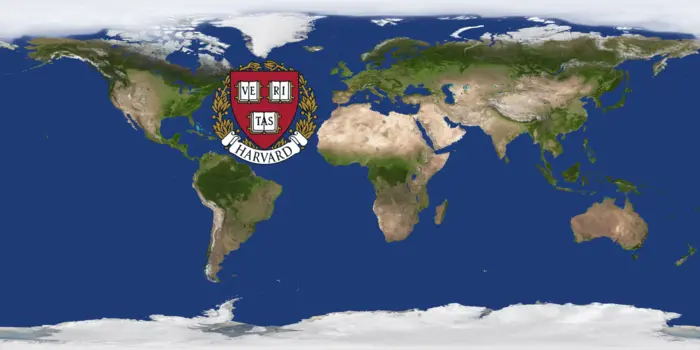
Nous discutons surtout ici du cas et , car nous-mêmes sommes constitués de surfaces bidimensionnelles, comme les cellules, les membranes, la peau ou les tissus. Une application , écrite comme définit une surface bidimensionnelle. Afin de gagner de la place, nous écrivons aussi simplement . En infographie, est appelée -application. Le plan est l'endroit où l'on dessine une texture. L'application la place sur la surface. En géographie, l'application est appelée (surprise !) une carte. Plusieurs cartes définissent un atlas. Les courbes et sont appelées courbes de quadrillage.
11.2.3 Un aperçu de la paramétrisation des sphères et des ellipsoïdes
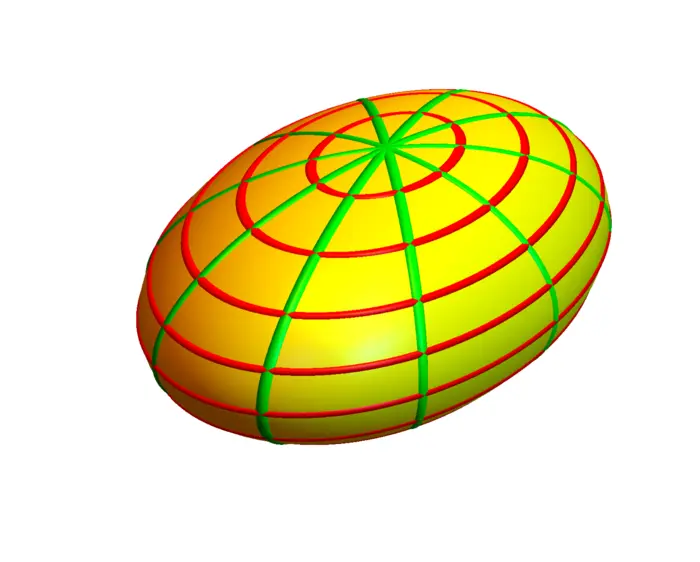
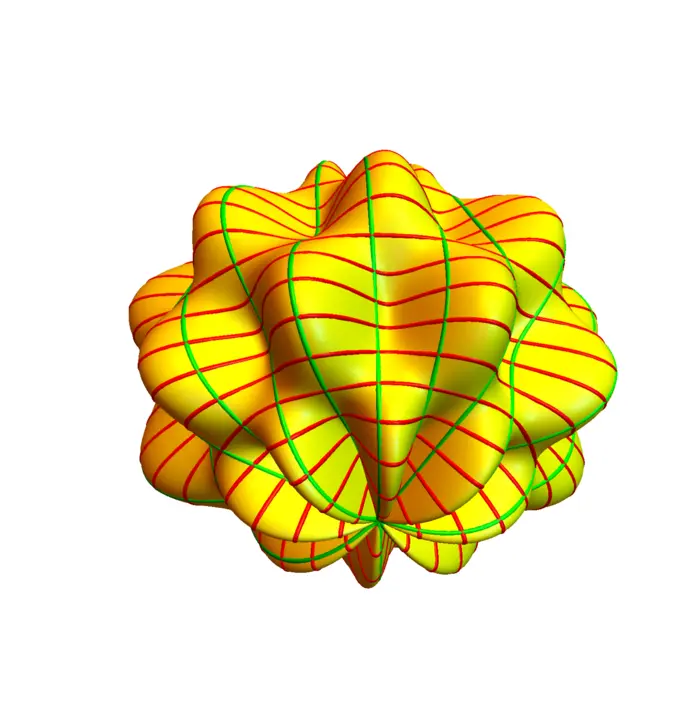
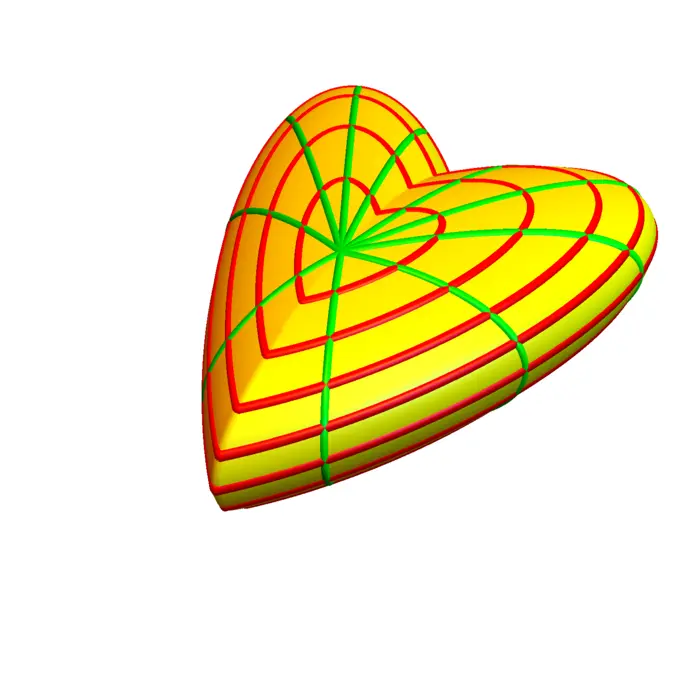
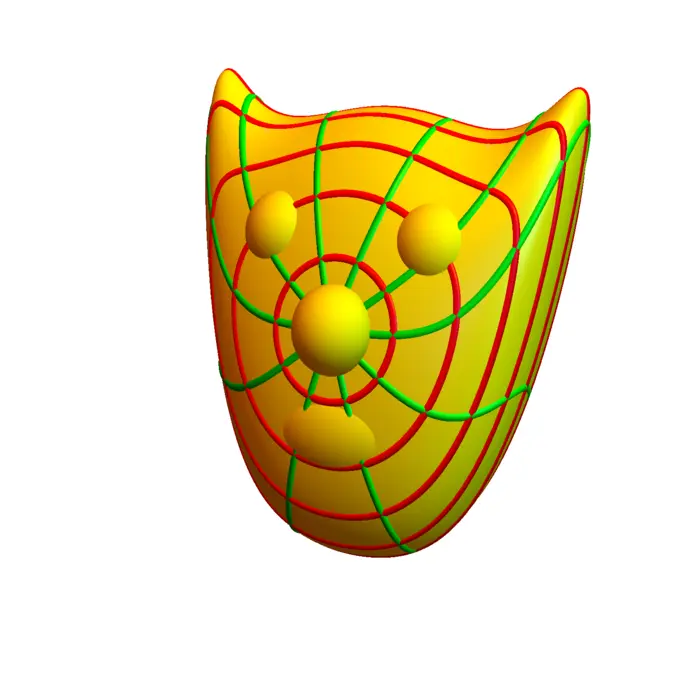
La paramétrisation produit la sphère . La sphère complète a , . En modifiant les coordonnées, on obtient un ellipsoïde satisfaisant . En permettant à d'être des fonctions de , on obtient des « sphères bosselées » comme
11.2.4 Plans et courbes de quadrillage
Les plans sont décrits par des applications linéaires avec et . L'application jacobienne est . Soient les deux vecteurs colonnes de . En fait, est un raccourci pour , qui est le vecteur vitesse de la courbe de quadrillage .
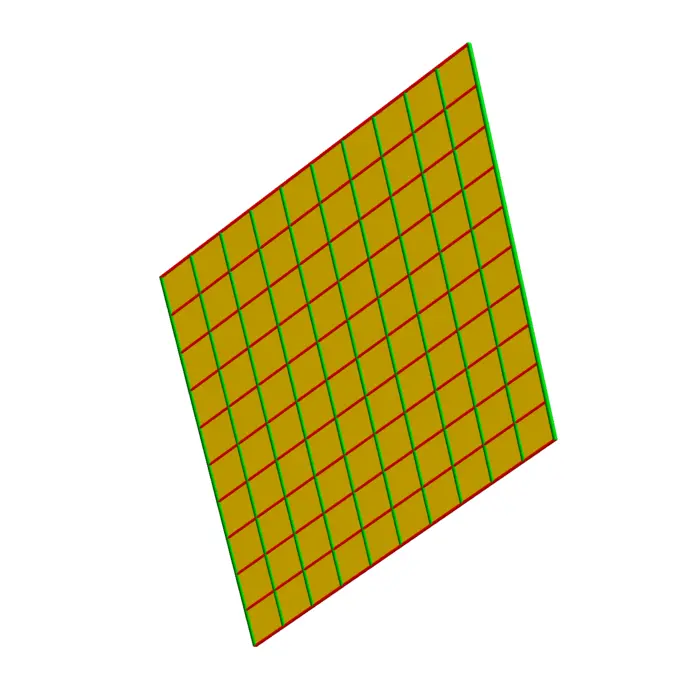
11.2.5 Exemple de paramétrisation plane
Un exemple est la paramétrisation . Dans ce cas et On voit qui a pour déterminant . On a aussi
11.2.6 Dévoiler le facteur de distorsion : Un lien avec le produit vectoriel
Le calcul précédent suggère une relation entre le vecteur normal et la forme fondamentale . En trois dimensions, le facteur de distorsion d'une paramétrisation peut en effet toujours être réécrit en utilisant le produit vectoriel :
Théorème 1. .
Preuve. Comme l'identité est l'identité de Cauchy-Binet qui se ramène à , où est l'angle entre et . C'est l'angle entre les courbes de quadrillage que vous voyez sur les images. ◻
11.3 EXEMPLES
Exemple 1. Pour la sphère unité et : \begin{aligned} g&=A^{T}A\\ &=\begin{bmatrix} \cos (\phi) \cos (\theta) & \cos (\phi) \sin (\theta) & -\sin (\phi) \\ -\sin (\phi) \sin (\theta) & \sin (\phi) \cos (\theta) & 0 \end{bmatrix} \begin{bmatrix} \cos (\phi) \cos (\theta) & -\sin (\phi) \sin (\theta) \\ \cos (\phi) \sin (\theta) & \sin (\phi) \cos (\theta) \\ -\sin (\phi) & 0 \end{bmatrix} \end{aligned} Ce qui donne et est le facteur de distorsion.
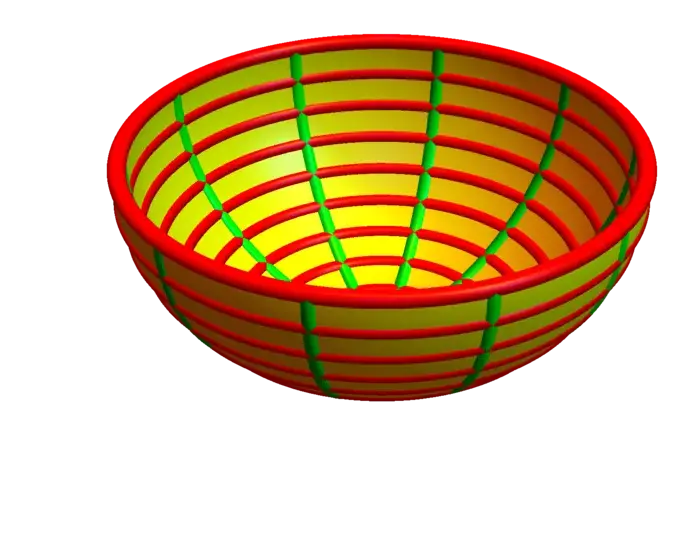
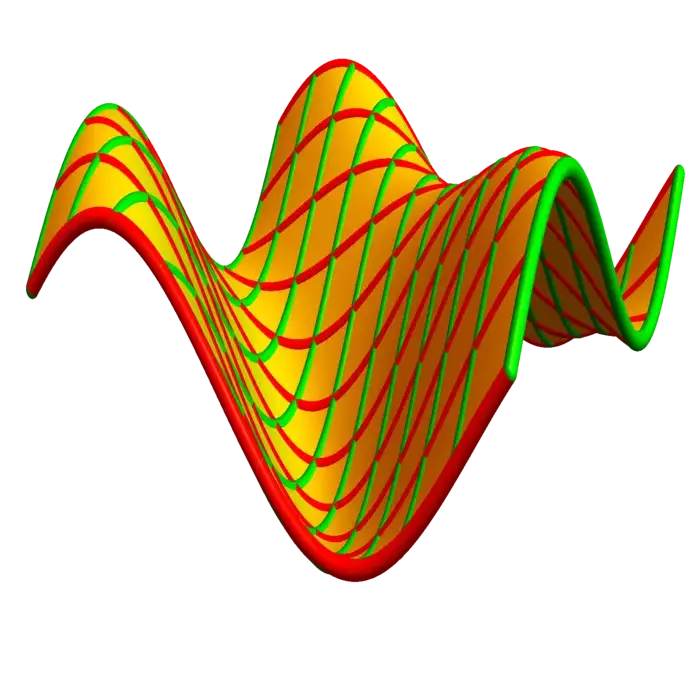
Exemple 2. Une classe importante de surfaces sont les graphes . Sa paramétrisation la plus naturelle est , où l'application soulève simplement la partie inférieure vers la version surélevée. Un exemple est le paraboloïde elliptique et le paraboloïde hyperbolique . On aurait pu bien sûr aussi écrire .
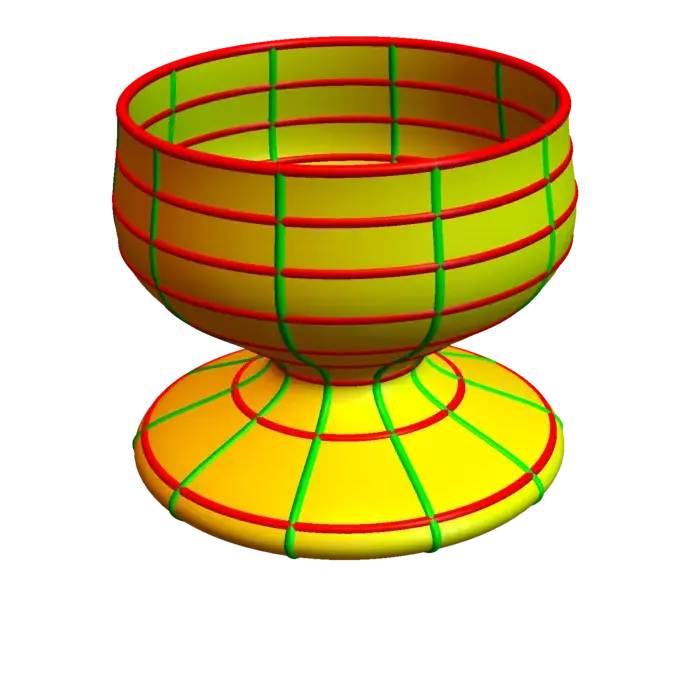
Exemple 3. Une surface de révolution est paramétrée comme Notez que l'on peut utiliser n'importe quelles variables. Dans ce cas, , sont utilisées. Un exemple est le cône ou l'hyperboloïde à une nappe
Exemple 4. Le tore est donné en coordonnées cylindriques par . On peut le paramétrer en utilisant l'angle polaire et l'angle polaire centré au centre du cercle comme Les deux angles et vont de à . On voit maintenant aussi la relation avec les coordonnées toroïdales.
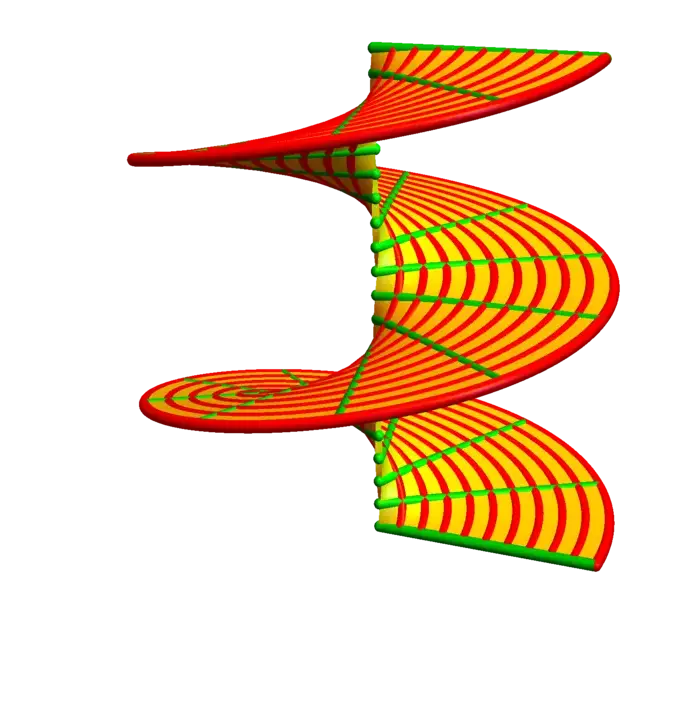
Exemple 5. L'hélicoïde est la surface que vous voyez comme un escalier ou une vis. La paramétrisation est . Comment pouvons-nous comprendre cela ? La clé est de regarder les courbes de quadrillage. Si , on obtient une courbe que nous avions identifiée comme une hélice. D'un autre côté, si vous fixez , alors vous obtenez des droites.
11.3.1 Remarque : Tenseurs métriques et géométrie riemannienne
La première forme fondamentale est aussi appelée un tenseur métrique. En géométrie riemannienne, on considère une variété munie d'une métrique . Le cas le plus simple est lorsque provient d'une paramétrisation, comme nous l'avons fait ici. En physique, on sait que c'est la masse qui déforme l'espace-temps. La quantité est un analogue multiplicatif de . Pour une matrice carrée définie positive inversible , nous verrons plus tard l'identité qui illustre comment le déterminant et la trace sont tous deux des quantités numériques essentielles dérivées d'une matrice. La trace est additive à cause de et le déterminant est multiplicatif comme nous le verrons plus tard.
11.3.2 Manières de représenter une variété
Pour résumer, nous avons vu jusqu'à présent qu'il existe deux manières fondamentalement différentes de décrire une variété. La première consiste à l'écrire comme une surface de niveau , qui est un noyau d'une application . La seconde consiste à l'écrire comme l'image d'une application .
11.4 ILLUSTRATION



EXERCICES
Exercice 1. Paramétrez la partie supérieure de l'hyperboloïde à deux nappes , comme une surface de révolution.
Exercice 2.
- Paramétrez le plan en utilisant une application .
- Trouvez maintenant la matrice et calculez ainsi que le facteur de distorsion .
- Calculez aussi , et puis calculez . Vous devriez obtenir le même nombre.
Exercice 3. Étant donnée une paramétrisation du -tore, trouvez l'équation implicite qui décrit ce tore.
Exercice 4. Paramétrez le paraboloïde hyperbolique . Quelle est la première forme fondamentale qui est \begin{aligned} g = \begin{bmatrix} r_{x} \cdot r_{x} & r_{x} \cdot r_{y} \\ r_{y} \cdot r_{x} & r_{y} \cdot r_{y} \end{bmatrix}? \end{aligned} Quel est le facteur de distorsion ?
Exercice 5. La matrice est aussi appelée la première forme fondamentale. Si est une paramétrisation de l'espace-temps alors est le tenseur métrique de l'espace-temps. Les entrées de la matrice apparaissent en relativité générale. Pour certaines raisons, les physiciens utilisent des symboles grecs pour accéder aux entrées de la matrice. Ils écrivent pour l'entrée à la ligne et à la colonne . Cela apparaît par exemple dans les équations de champ d'Einstein Nous voulons simplement que vous cherchiez l'équation et que vous disiez pour chacune des variables, comment elle s'appelle et si c'est une matrice, une fonction scalaire ou une constante.
- Distinguer et dans . Ils ne coïncident que pour .↩︎