Tabla de Contenidos
11.1 INTRODUCCIÓN
11.1.1 Desenvolviendo Formas: La Magia de la Parametrización
Hemos visto que al parametrizar curvas , tenemos mucho más control que al observar curvas dadas por ecuaciones. Sería difícil describir una hélice en términos de ecuaciones, por ejemplo. Para las superficies también, es bueno tener tantas coordenadas como la dimensión. Vivimos en una esfera bidimensional pero no usamos las coordenadas para describir un punto en la superficie. Usamos dos coordenadas (longitud y latitud). Euler usó primero la parametrización donde , son ángulos. Puedes verificar rápidamente que suma , de modo que cualesquiera que sean los ángulos , que elijamos, siempre estamos en la esfera.
11.2 LECCIÓN
11.2.1 Jacobianos y Área de Superficie
Un mapa se llama una parametrización. Hemos visto mapas de a , que eran curvas. Luego hemos visto mapas que eran cambios de coordenadas. En cada caso definimos la matriz jacobiana . En el caso de la curva , era la velocidad d r(t)=r^{\prime}(t). En el caso de cambios de coordenadas, la matriz jacobiana se usó para obtener el factor de distorsión de volumen . Hoy, examinamos el caso . En particular en , . Como en el caso de las curvas, usamos la letra para describir el mapa. La imagen de un mapa es entonces una superficie -dimensional en . El factor de distorsión definido como se usará más adelante para calcular el área de superficie.1
11.2.2 Superficies y Mapas
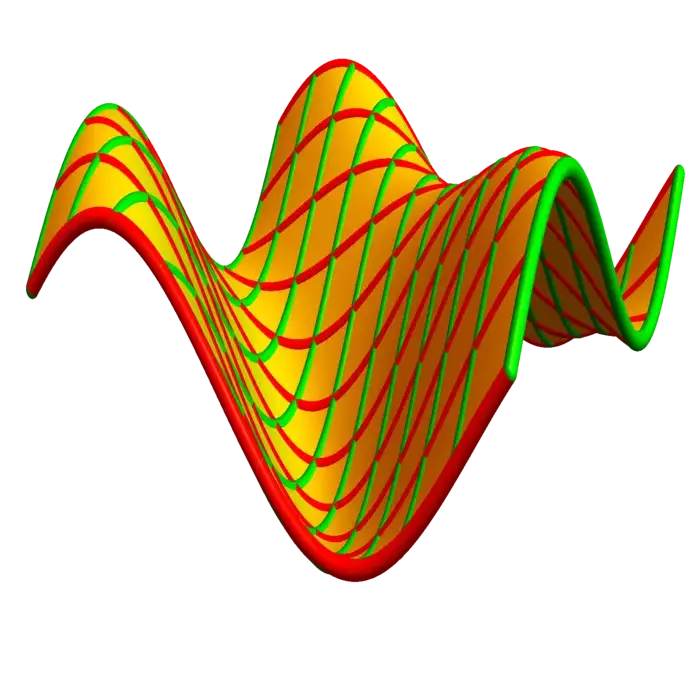
Aquí discutimos principalmente el caso y , ya que nosotros mismos estamos hechos de superficies bidimensionales, como células, membranas, piel o tejido. Un mapa , escrito como define una superficie bidimensional. Para ahorrar espacio, también escribimos simplemente . En gráficos por computadora, la se llama mapa . El plano es donde se dibuja una textura. El mapa la coloca sobre la superficie. En geografía, el mapa se llama (¡sorpresa!) un mapa. Varios mapas definen un atlas. Las curvas y se llaman curvas de cuadrícula.
11.2.3 Una Mirada a la Parametrización de Esferas y Elipsoides
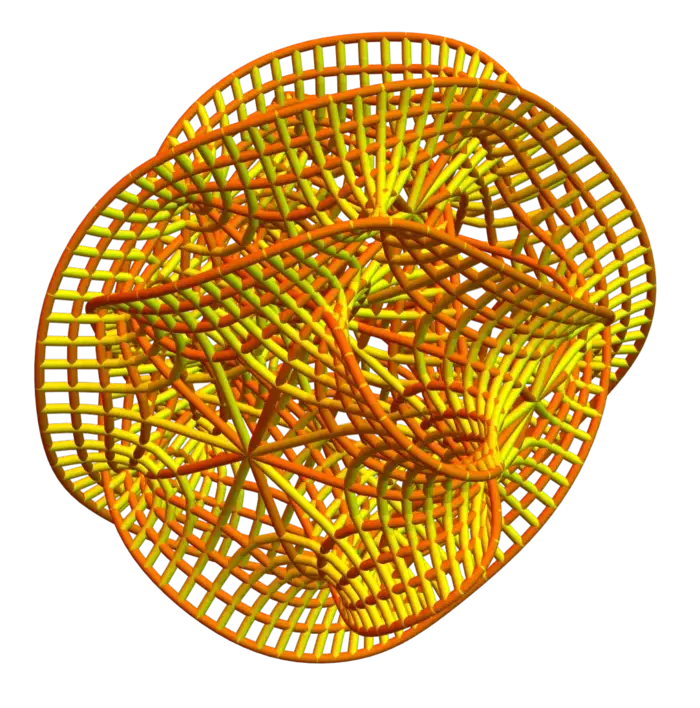
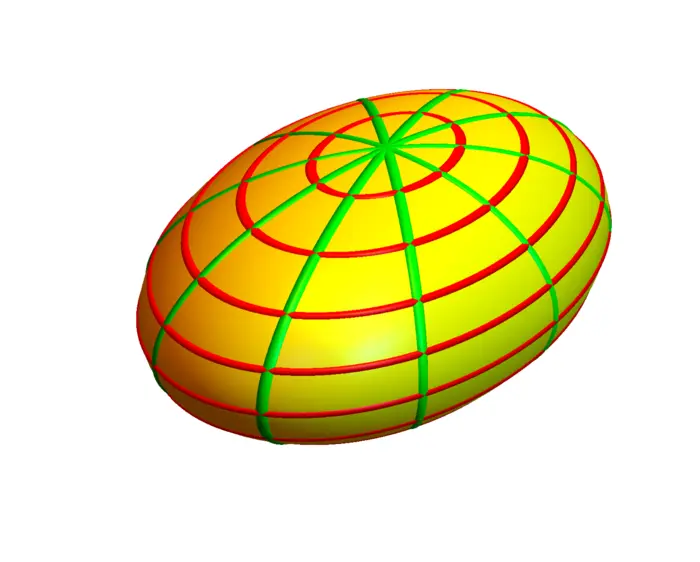
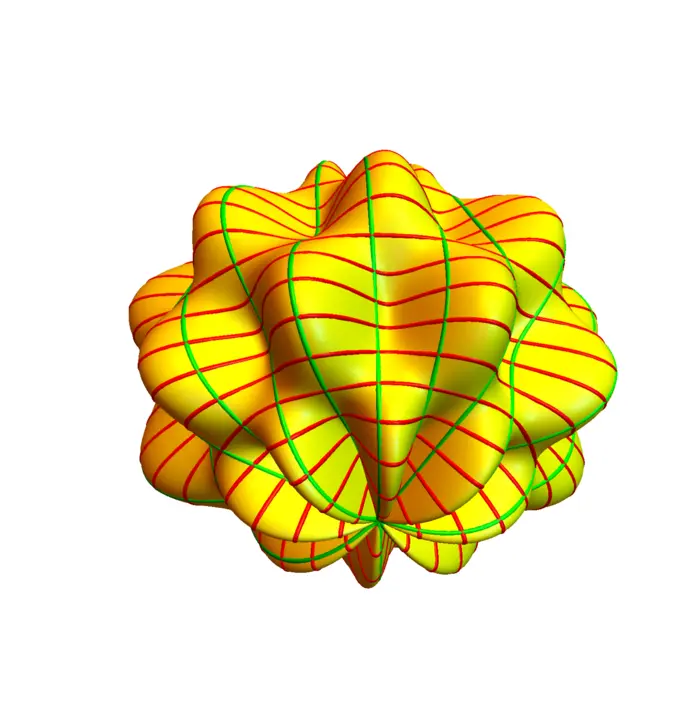
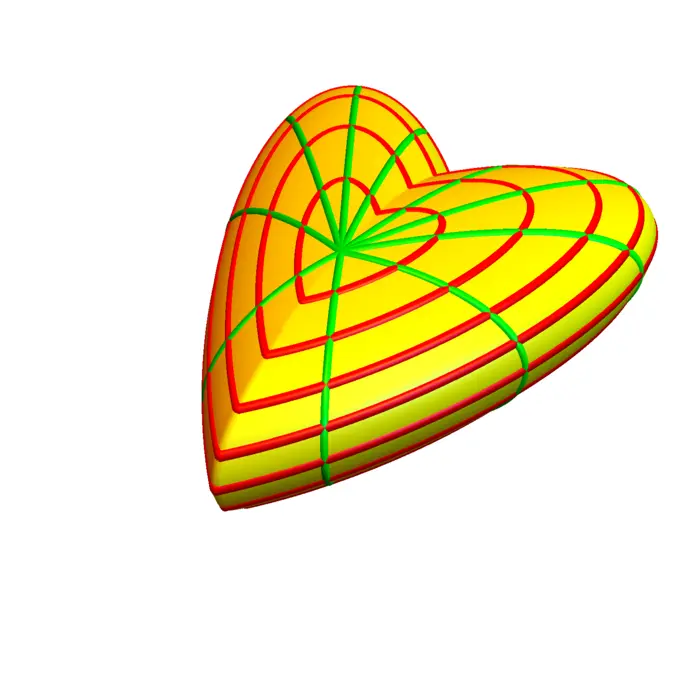
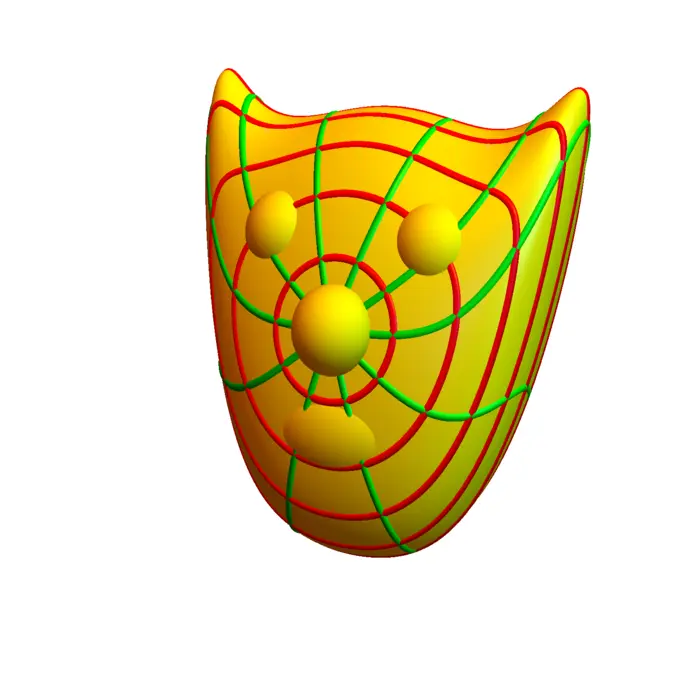
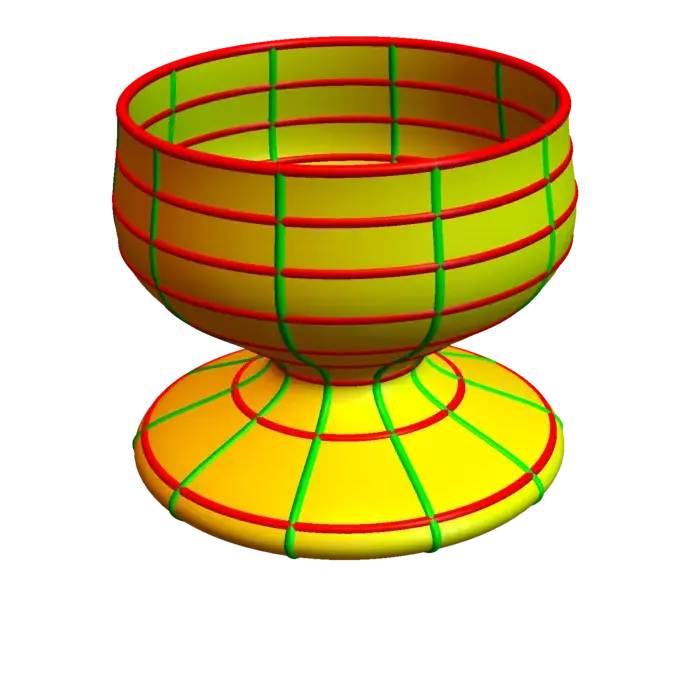
La parametrización produce la esfera . La esfera completa tiene , . Modificando las coordenadas, obtenemos un elipsoide que satisface . Permitiendo que sean funciones de obtenemos "esferas con protuberancias" como
11.2.4 Planos y Curvas de Cuadrícula
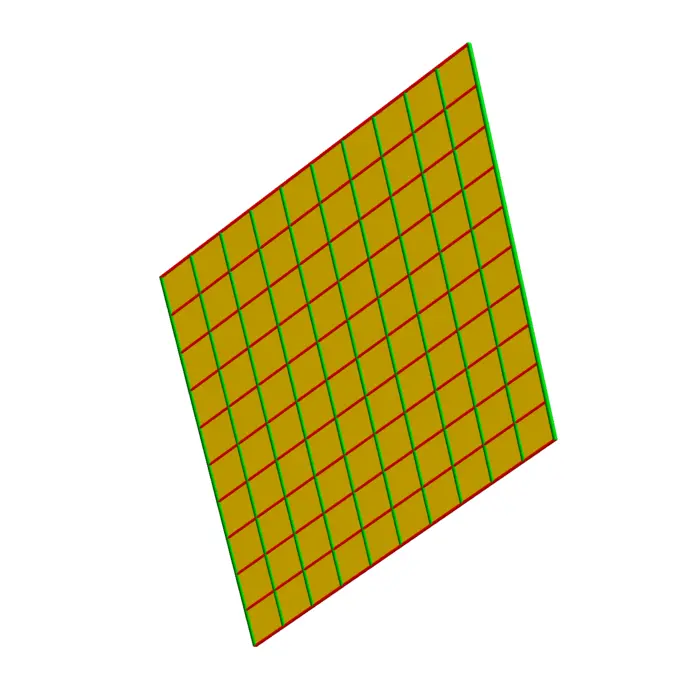
Los planos se describen mediante mapas lineales con y . El mapa jacobiano es . Sean los dos vectores columna de . En realidad, es una abreviatura de , que es el vector velocidad de la curva de cuadrícula .
11.2.5 Ejemplo de Parametrización de un Plano
Un ejemplo es la parametrización . En este caso y Vemos que tiene determinante . También tenemos
11.2.6 Revelando el Factor de Distorsión: Una Conexión con el Producto Cruz
El cálculo anterior sugiere una relación entre el vector normal y la forma fundamental . En tres dimensiones, el factor de distorsión de una parametrización siempre puede reescribirse usando el producto cruz:
Teorema 1. .
Demostración. Como la identidad es la identidad de Cauchy-Binet que se reduce a , donde es el ángulo entre y . Este es el ángulo entre las curvas de cuadrícula que ves en las imágenes. ◻
11.3 EJEMPLOS
Ejemplo 1. Para la esfera unitaria y : \begin{aligned} g&=A^{T}A\\ &=\begin{bmatrix} \cos (\phi) \cos (\theta) & \cos (\phi) \sin (\theta) & -\sin (\phi) \\ -\sin (\phi) \sin (\theta) & \sin (\phi) \cos (\theta) & 0 \end{bmatrix} \begin{bmatrix} \cos (\phi) \cos (\theta) & -\sin (\phi) \sin (\theta) \\ \cos (\phi) \sin (\theta) & \sin (\phi) \cos (\theta) \\ -\sin (\phi) & 0 \end{bmatrix} \end{aligned} Esto es y es el factor de distorsión.
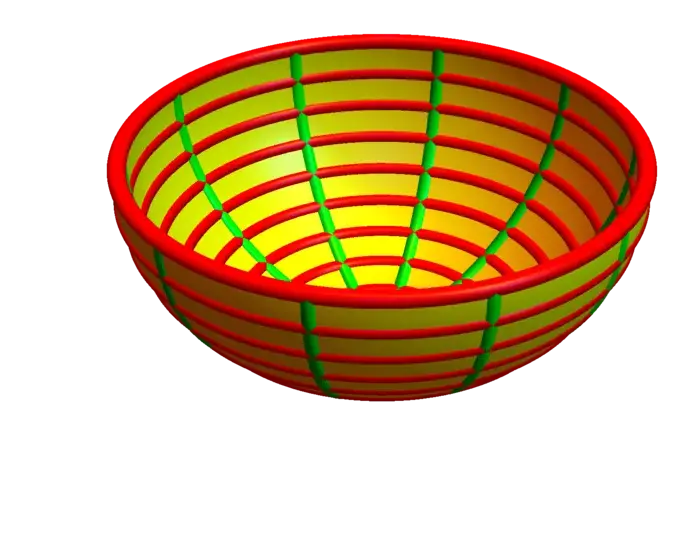
Ejemplo 2. Una clase importante de superficies son las gráficas . Su parametrización más natural es , donde el mapa simplemente eleva la parte inferior a la versión elevada. Un ejemplo es el paraboloide elíptico y el paraboloide hiperbólico . Por supuesto, también podríamos haber escrito .
Ejemplo 3. Una superficie de revolución se parametriza como Nota que podemos usar cualquier variable. En este caso, se usan , . Un ejemplo es el cono o el hiperboloide de una hoja
Ejemplo 4. El toro está dado en coordenadas cilíndricas como . Podemos parametrizar esto usando el ángulo polar y el ángulo polar centrado en el centro del círculo como Ambos ángulos y van de a . Ahora también vemos la relación con las coordenadas toroidales.
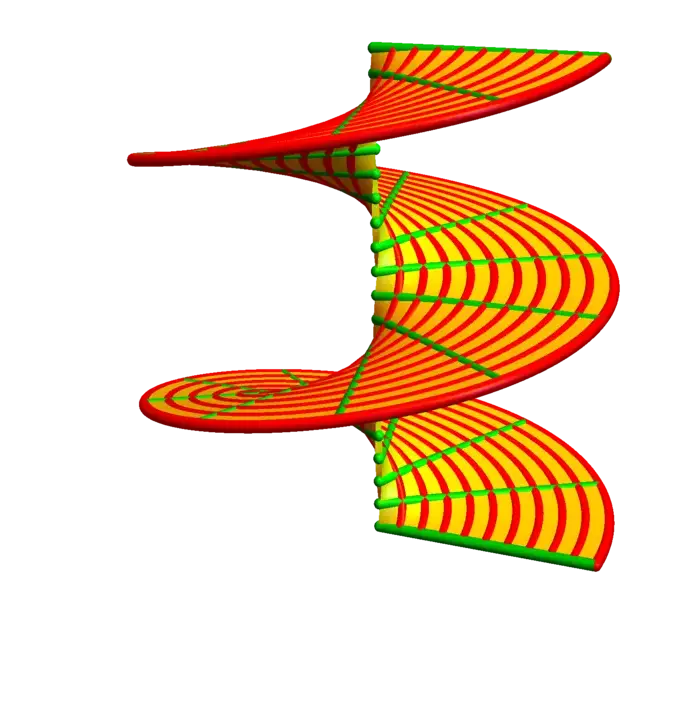
Ejemplo 5. El helicoide es la superficie que ves como una escalera o un tornillo. La parametrización es . ¿Cómo podemos entender esto? La clave es mirar las curvas de cuadrícula. Si , obtenemos una curva que habíamos identificado como una hélice. Por otro lado, si fijas , entonces obtienes líneas.
11.3.1 Comentario Adicional: Tensores Métricos y Geometría Riemanniana
La primera forma fundamental también se llama un tensor métrico. En geometría riemanniana se estudia una variedad equipada con una métrica . El caso más simple es cuando proviene de una parametrización, como hicimos aquí. En física, sabemos que es la masa la que deforma el espacio-tiempo. La cantidad es un análogo multiplicativo de . Para una matriz cuadrada definida positiva invertible , veremos más adelante la identidad que ilustra cómo tanto el determinante como la traza son cantidades numéricas fundamentales derivadas de una matriz. La traza es aditiva debido a y el determinante es multiplicativo como veremos más adelante.
11.3.2 Formas de Representar una Variedad
Para resumir, hemos visto hasta ahora que hay dos formas fundamentalmente diferentes de describir una variedad. La primera es escribirla como una superficie de nivel que es un núcleo de un mapa . La segunda es escribirla como la imagen de algún mapa .
11.4 ILUSTRACIÓN



EJERCICIOS
Ejercicio 1. Parametrice la parte superior del hiperboloide de dos hojas , como superficie de revolución.
Ejercicio 2.
- Parametrice el plano usando una aplicación .
- Ahora encuentre la matriz y calcule así como el factor de distorsión .
- También calcule , y y luego calcule . Debería obtener el mismo número.
Ejercicio 3. Dada una parametrización del -toro, encuentre la ecuación implícita que describe este toro.
Ejercicio 4. Parametrice el paraboloide hiperbólico . ¿Cuál es la primera forma fundamental que es \begin{aligned} g = \begin{bmatrix} r_{x} \cdot r_{x} & r_{x} \cdot r_{y} \\ r_{y} \cdot r_{x} & r_{y} \cdot r_{y} \end{bmatrix}? \end{aligned} ¿Cuál es el factor de distorsión ?
Ejercicio 5. La matriz también se llama la primera forma fundamental. Si es una parametrización del espacio-tiempo entonces es el tensor métrico del espacio-tiempo. Las entradas de la matriz de aparecen en la relatividad general. Ahora, por alguna razón, los físicos usan símbolos griegos para acceder a las entradas de la matriz. Escriben para la entrada en la fila y columna . Esto aparece por ejemplo en las ecuaciones de campo de Einstein Solo queremos que busque la ecuación y diga de cada una de las variables, cómo se llama y si es una matriz, una función escalar o una constante.
- Distinga y en . Solo coinciden para .↩︎