Índice
- 5.1 INTRODUÇÃO
- 5.2 AULA
- 5.2.1 Variedades Lineares e Espaços
- 5.2.2 Vetores Normais e Planos
- 5.2.3 Núcleos e Imagens de Matrizes
- 5.2.4 Explorando Superfícies Não Lineares
- 5.2.5 Elipsoides
- 5.2.6 Hiperboloides
- 5.2.7 Paraboloides
- 5.2.8 Superfícies especiais
- 5.2.9 Observação Lateral: Estruturas Algébricas e Forças
- 5.2.10 Superfícies Polinomiais: Variedades
- 5.3 EXEMPLOS
- EXERCÍCIOS
5.1 INTRODUÇÃO
5.1.1 Compreendendo Superfícies
Superfícies são objetos de codimensão um em um espaço. Elas são importantes porque podem dividir o espaço. Podemos confinar água em uma garrafa. Isso não é possível para codimensão dois. Você não pode confinar água em uma curva. Similarmente, se você vivesse no espaço -dimensional, não poderia armazenar água em uma superfície bidimensional. Mas as coisas já podem ficar complicadas em três dimensões. Existem superfícies bidimensionais fechadas que não confinam espaço algum. Tente beber de uma garrafa de Klein!
5.1.2 Descrevendo Superfícies
Uma superfície pode ser descrita matematicamente de duas maneiras fundamentalmente diferentes. Ela é dada como uma superfície de nível de uma função naquele espaço. Ou então pode ser a imagem de um mapa chamado parametrização. Você conhece isso da Terra, que é uma esfera. Podemos dizer que uma esfera é o conjunto de pontos que têm uma distância fixa até o seu ponto central. Ou então podemos parametrizar a esfera, por exemplo usando longitude e latitude. Um plano passando pelo pode ser dado ou como o núcleo de uma matriz ou então como a imagem de uma matriz . O primeiro escreve . O segundo escreve o plano como , onde , são os vetores coluna de e fornece os parâmetros.
5.2 AULA
5.2.1 Variedades Lineares e Espaços
Se é uma matriz, o espaço solução de um sistema de equações é chamado de variedade linear. É o conjunto de soluções de transladado de modo que passe por um dos pontos. A equação , por exemplo, descreve uma reta em passando por e . As soluções de formam um espaço linear, o que significa que podemos somar ou escalar soluções e ainda ter soluções. Podemos reformular o que foi dito dizendo que um espaço linear é uma variedade linear que contém . Por exemplo, para obtemos um plano que é paralelo ao plano . O primeiro é uma variedade linear (também chamado de espaço afim), o último é um espaço linear. É o espaço solução de com e . Ambos os planos são perpendiculares a . Para encontrar uma equação para o plano passando por pontos , defina e então escreva , onde é obtido substituindo um ponto. O produto vetorial é útil.
5.2.2 Vetores Normais e Planos
O seguinte exemplo importante lida com em .
Teorema 1. O vetor é perpendicular ao plano .
Prova. Dados dois pontos , no plano. Então temos e . Então é um vetor dentro do plano. Agora . Isso significa que é perpendicular ao vetor . ◻
Em três dimensões, isso significa que o plano tem um vetor normal . Tenha isso em mente, especialmente porque é nossa casa.
5.2.3 Núcleos e Imagens de Matrizes
Este resultado de dualidade será mais tarde identificado como um teorema fundamental da álgebra linear. Será importante em ajuste de dados, por exemplo. O núcleo de uma matriz é o espaço linear de todas as soluções . O núcleo consiste de todas as raízes de . A imagem de uma matriz é o espaço linear de todos os vetores . Abreviamos para o núcleo e para a imagem. Voltaremos a isso mais tarde.
Teorema 2. A imagem de é perpendicular ao núcleo de .
Prova. Se está no núcleo de , então . Isso significa que é perpendicular a cada vetor linha de . Mas isso significa que é perpendicular ao vetor coluna de . Então, é perpendicular à imagem de . Esta linha de argumento pode ser invertida para ver que se é perpendicular à imagem de , então ele está no núcleo de . ◻
5.2.4 Explorando Superfícies Não Lineares
Dada uma função , o conjunto solução é uma hipersuperfície. Frequentemente dizemos "superfície" embora "superfície" seja reservado para . As superfícies não lineares mais simples são as variedades quadráticas definidas por uma matriz simétrica , um vetor linha e um escalar . Assumimos que não é a matriz nula, caso contrário, estamos no caso de uma variedade linear. Também podemos assumir que é simétrica . Para notação, escrevemos e .
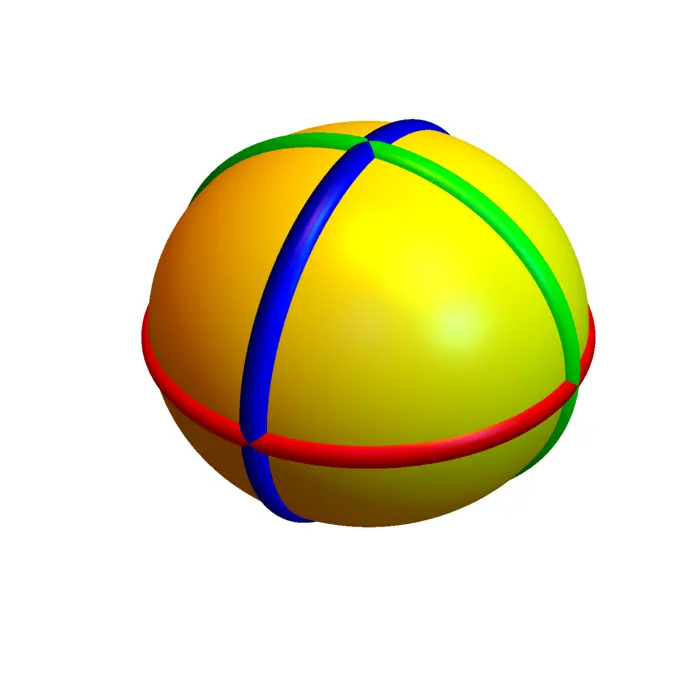
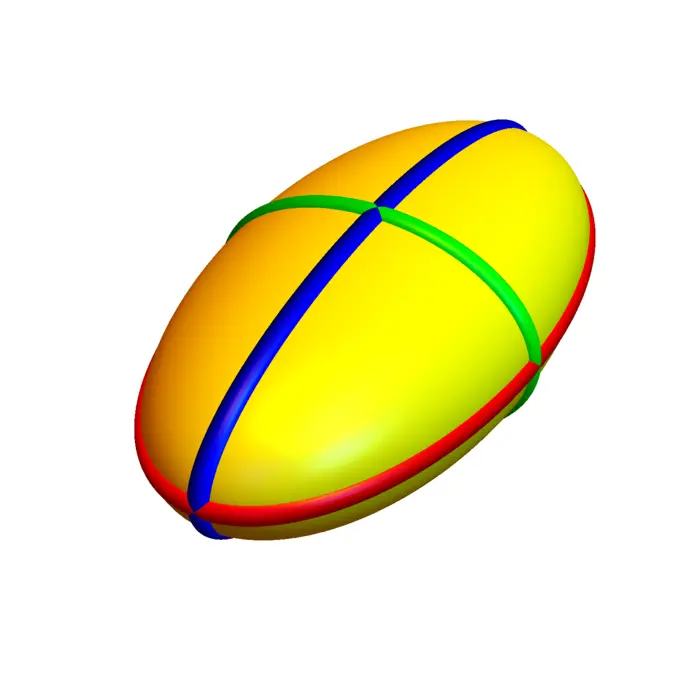
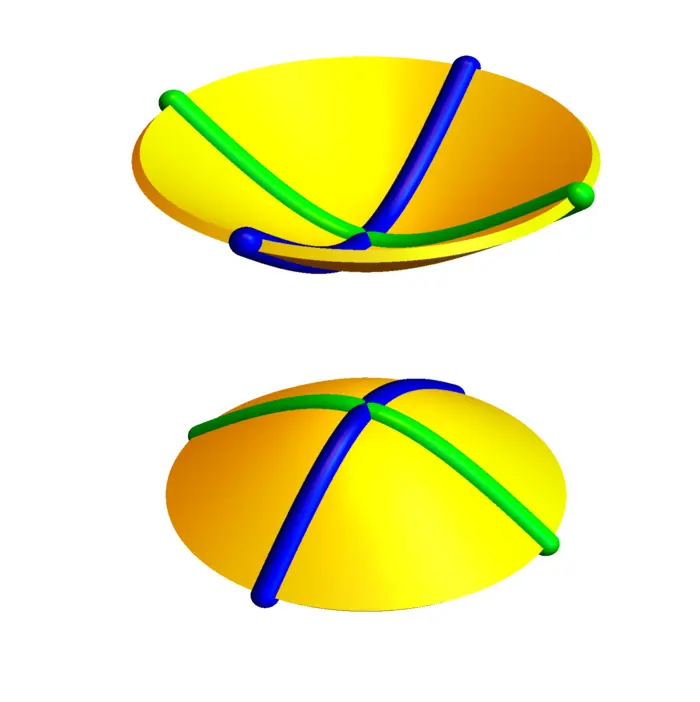
5.2.5 Elipsoides
Para e e obtemos a esfera . Em , uma esfera é um círculo . Em três dimensões temos a familiar esfera . Um elipsoide mais geral com é . Intersectando com ou ou , vemos traços, que são todos elipses.
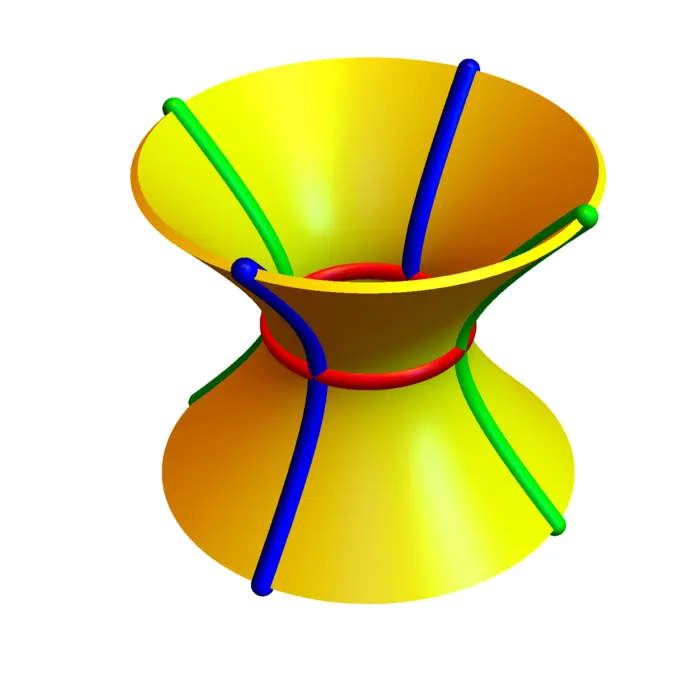
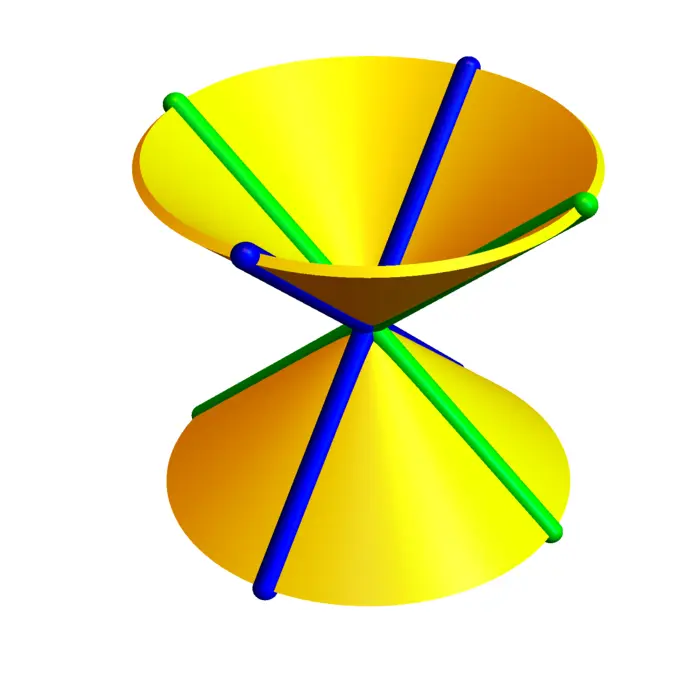
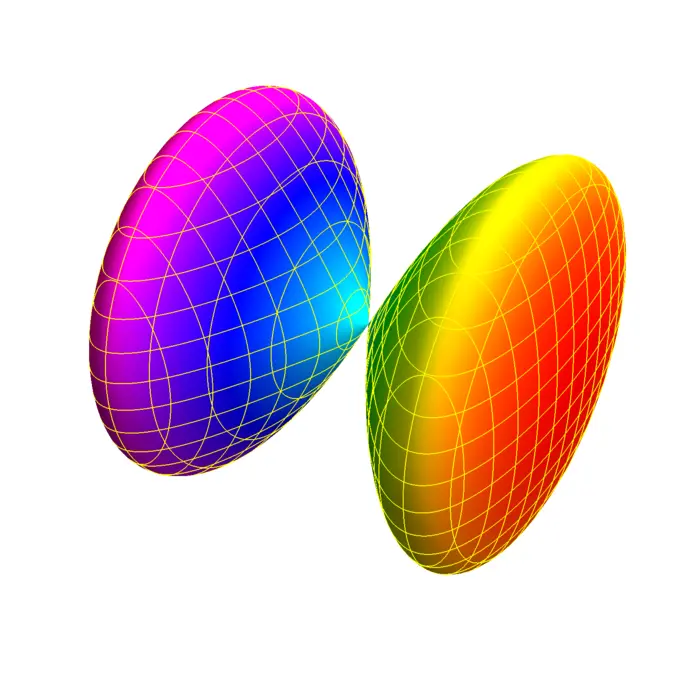
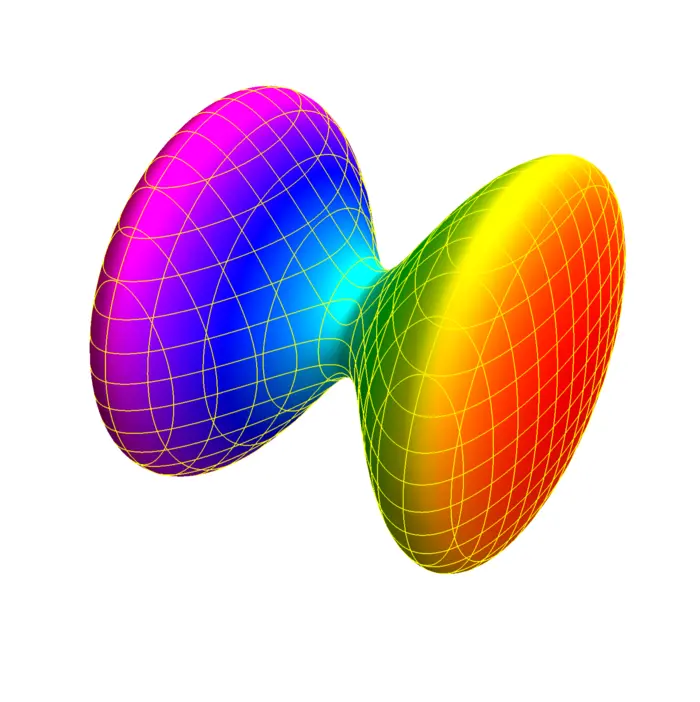
5.2.6 Hiperboloides
Para e , obtemos um hiperboloide de uma folha . Para e , obtemos um hiperboloide de duas folhas . Um hiperboloide mais geral é da forma com . A interseção com dá, no caso de uma folha, um círculo, no caso de duas folhas, nada. O traço ou o traço são ambos hipérboles.
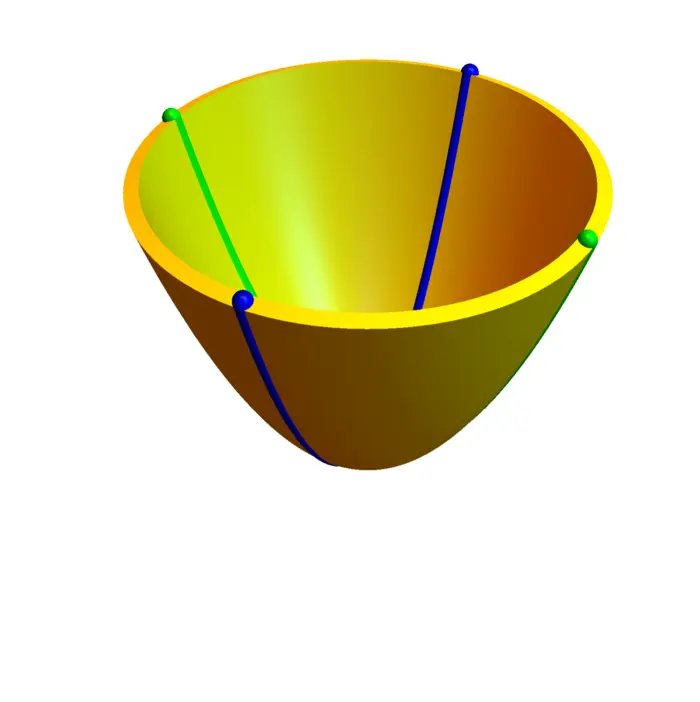
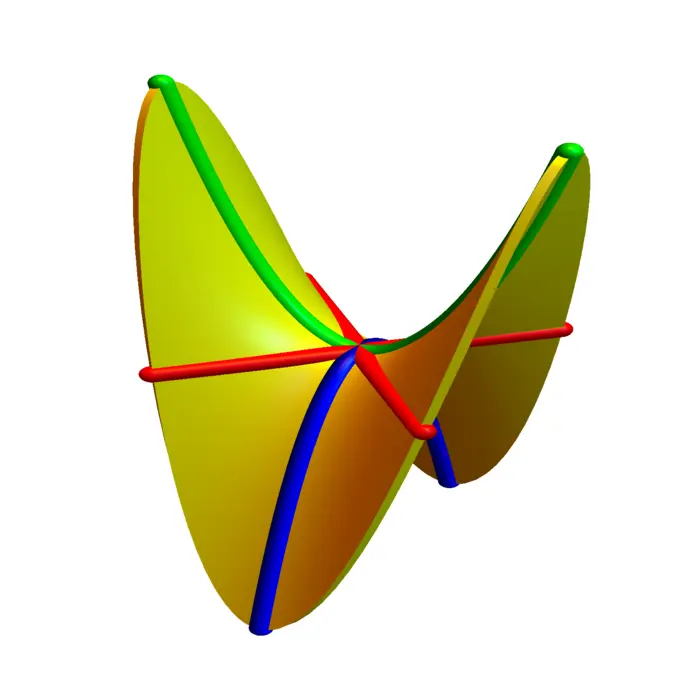
5.2.7 Paraboloides
Para e e obtemos o paraboloide , para e e obtemos o paraboloide hiperbólico . Podemos reconhecer paraboloides intersectando com ou para ver parábolas. Intersectar o paraboloide elíptico com dá uma elipse. Intersectar o paraboloide hiperbólico com dá uma hipérbole.
5.2.8 Superfícies especiais
Se e , obtemos um cone . Para e obtemos o cilindro .
5.2.9 Observação Lateral: Estruturas Algébricas e Forças
A -esfera e a -esfera possuem uma multiplicação: está nos números complexos e está nos quatérnions . A -esfera é o grupo de gauge para o eletromagnetismo, a -esfera (também chamada ) é responsável pela força fraca. Nenhuma outra esfera euclidiana possui uma multiplicação para a qual seja suave. Michael Atiyah uma vez apontou que essa particularidade algébrica pode não ser uma coincidência e ser responsável pela estrutura do modelo padrão das partículas elementares (uma das teorias mais precisas já construídas pela humanidade). A força forte aparece quando se pode fazer um conjunto de matrizes atuar em . Atiyah sugeriu que a gravidade poderia estar relacionada aos octônions . Lá, ainda possui uma multiplicação, mas não é mais associativa. A lista das álgebras de divisão normadas , , e .1
5.2.10 Superfícies Polinomiais: Variedades
Dado um polinômio de variáveis, pode-se olhar para a superfície . Ela é chamada de variedade.
5.3 EXEMPLOS
Exemplo 1. P: Encontre o plano que contém a reta e o ponto .
R: contém e e portanto os vetores e . O produto vetorial entre e é . Ele é perpendicular a . Assim, a equação é , onde pode ser obtido substituindo um ponto . Isso dá de modo que .
Exemplo 2. Podemos identificar a superfície ? Completar o quadrado resulta em Agora . Isso é um hiperboloide de duas folhas centrado em .
Exemplo 3. Intersectando o cone com o plano resulta em uma hipérbole . A interseção com resulta em um círculo . Intersectando com resulta em , uma parábola. Como seccionar um cone pode resultar em hipérbole, uma elipse ou uma parábola como cortes, chama-se estas últimas de seções cônicas.
Exemplo 4. O caso das variedades quadráticas singulares é ainda mais rico: é um hiperboloide cilíndrico, é a união de dois planos e . A superfície é a união de dois planos paralelos, a superfície é um plano.
EXERCÍCIOS
Exercício 1.
- Que tipo de curva é ?
- Que superfície é ?
- Seja o conjunto de pontos para os quais . Descreva este conjunto.
Exercício 2.
- Que tipos de curvas você pode obter ao intersectar o paraboloide hiperbólico com um plano?
- Explore o que você obtém se intersectar o hiperboloide com o rotacionado por graus em torno do eixo .
Exercício 3. Encontre planos explícitos que, quando intersectados com o hiperboloide , produzem uma elipse, uma hipérbole ou uma parábola.
Exercício 4. Encontre a equação de um plano que seja tangente às três esferas unitárias centradas em , , .
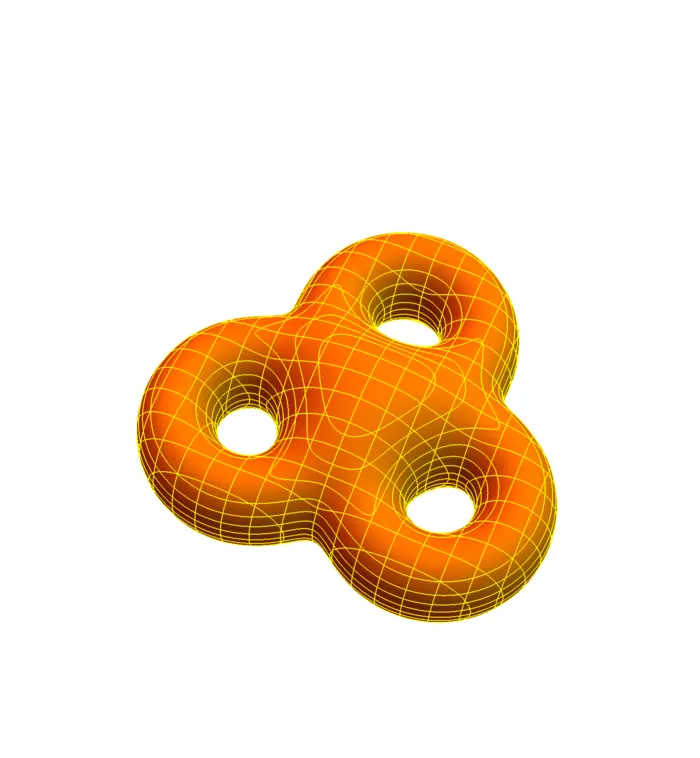
Exercício 5. Construa uma função concreta de três variáveis tal que alguma superfície de nível seja um pretzel, uma superfície com três furos. Dica: a superfície é a união das superfícies e . Agora, pode produzir superfícies nas quais as coisas são coladas de forma suave. Se você pesquisar uma superfície na web ou na literatura, deve fornecer a referência. Você pode usar o computador para experimentar ou então descrever sua estratégia em palavras.

- Veja a palestra de 2010 de Atiyah (https://www.youtube.com/watch?v=zCCxOE44M_M).↩︎