Table des matières
- 5.1 INTRODUCTION
- 5.2 COURS
- 5.2.1 Variétés linéaires et espaces
- 5.2.2 Vecteurs normaux et plans
- 5.2.3 Noyaux et images des matrices
- 5.2.4 Exploration des surfaces non linéaires
- 5.2.5 Ellipsoïdes
- 5.2.6 Hyperboloïdes
- 5.2.7 Paraboloïdes
- 5.2.8 Surfaces spéciales
- 5.2.9 Remarque annexe : Structures algébriques et forces
- 5.2.10 Surfaces polynomiales : variétés
- 5.3 EXEMPLES
- EXERCICES
5.1 INTRODUCTION
5.1.1 Comprendre les surfaces
Les surfaces sont des objets de codimension un dans un espace. Elles sont importantes car elles peuvent diviser l'espace. On peut confiner de l'eau dans une bouteille. Ce n'est pas possible pour la codimension deux. On ne peut pas confiner de l'eau dans une courbe. De même, si vous viviez dans un espace de dimension , vous ne pourriez pas stocker de l'eau dans une surface bidimensionnelle. Mais les choses peuvent déjà devenir délicates en trois dimensions. Il existe des surfaces fermées bidimensionnelles qui ne confinent aucun espace. Essayez de boire dans une bouteille de Klein !
5.1.2 Décrire les surfaces
Une surface peut être décrite mathématiquement de deux manières fondamentalement différentes. Elle est soit donnée comme surface de niveau d'une fonction sur cet espace. Ou alors elle peut être l'image d'une application appelée paramétrage. Vous le savez de la Terre, qui est une sphère. On peut soit dire qu'une sphère est l'ensemble des points ayant une distance fixe
à son centre. Ou alors on peut paramétrer la sphère, par exemple en utilisant la longitude et la latitude. Un plan passant par peut être donné soit comme le noyau d'une matrice , soit comme l'image d'une matrice . La première écrit . La seconde écrit le plan comme , où , sont les vecteurs colonnes de et donne les paramètres.
5.2 COURS
5.2.1 Variétés linéaires et espaces
Si est une matrice, l'espace des solutions d'un système d'équations est appelé une variété linéaire. C'est l'ensemble des solutions de translaté pour passer par un des points. L'équation par exemple décrit une droite dans passant par et . Les solutions de forment un espace linéaire, ce qui signifie que l'on peut additionner ou mettre à l'échelle des solutions et obtenir encore des solutions. On peut reformuler ce qui vient d'être dit en disant qu'un espace linéaire est une variété linéaire qui contient . Par exemple, pour on obtient un plan qui est parallèle au plan . Le premier est une variété linéaire (aussi appelé espace affine), le second est un espace linéaire. C'est l'espace des solutions de avec et . Les deux plans sont perpendiculaires à . Pour trouver une équation du plan passant par points , définissez puis écrivez , où est obtenu en substituant un point. Le produit vectoriel est bien pratique.
5.2.2 Vecteurs normaux et plans
L'exemple important suivant traite de dans .
Théorème 1. Le vecteur est perpendiculaire au plan .
Preuve. Étant donnés deux points , dans le plan. Alors on a et . Alors est un vecteur dans le plan. Maintenant . Cela signifie que est perpendiculaire au vecteur . ◻
En trois dimensions, cela signifie que le plan a un vecteur normal . Gardez cela à l'esprit, surtout parce que est notre espace.
5.2.3 Noyaux et images des matrices
Ce résultat de dualité sera plus tard identifié comme un théorème fondamental de l'algèbre linéaire. Il sera important en ajustement de données par exemple. Le noyau d'une matrice est l'espace linéaire de toutes les solutions de . Le noyau est constitué de toutes les racines de . L'image d'une matrice est l'espace linéaire de tous les vecteurs . On abrège pour le noyau et pour l'image. Nous y reviendrons plus tard.
Théorème 2. L'image de est perpendiculaire au noyau de .
Preuve. Si est dans le noyau de , alors . Cela signifie que est perpendiculaire à chaque vecteur ligne de . Mais cela signifie que est perpendiculaire au vecteur colonne de . Donc, est perpendiculaire à l'image de . Cette ligne d'argument peut être inversée pour voir que si est perpendiculaire à l'image de , alors il est dans le noyau de . ◻
5.2.4 Exploration des surfaces non linéaires
Étant donnée une fonction , l'ensemble solution est une hyper-surface. On dit souvent "surface" même si "surface" est réservé à . Les surfaces non linéaires les plus simples sont les variétés quadratiques définies par une matrice symétrique , un vecteur ligne et un scalaire . On suppose que n'est pas la matrice nulle, sinon on est dans le cas d'une variété linéaire. On peut aussi supposer que est symétrique . Pour la notation, on écrit et .
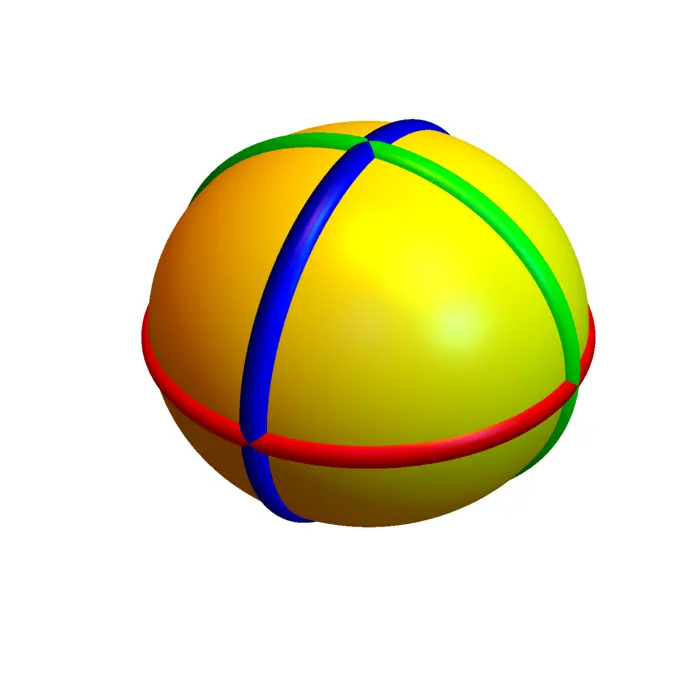
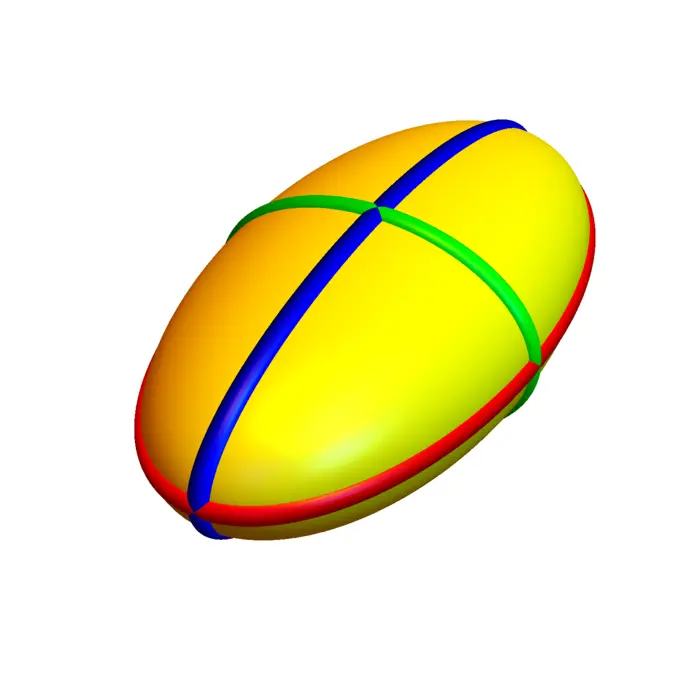
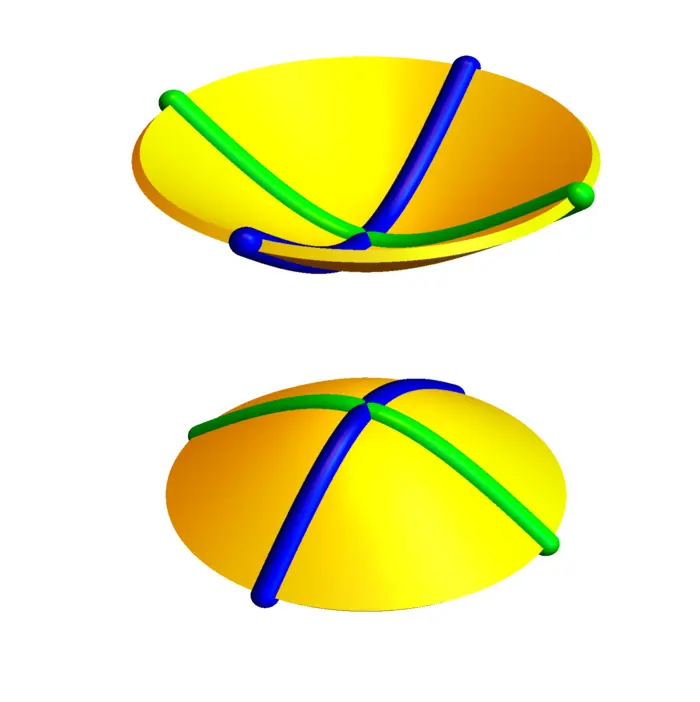
5.2.5 Ellipsoïdes
Pour et et , on obtient la sphère . Dans , une sphère est un cercle . En trois dimensions, on a la sphère familière . Un ellipsoïde plus général avec est . En intersectant avec ou ou , on voit des traces, qui sont toutes des ellipses.
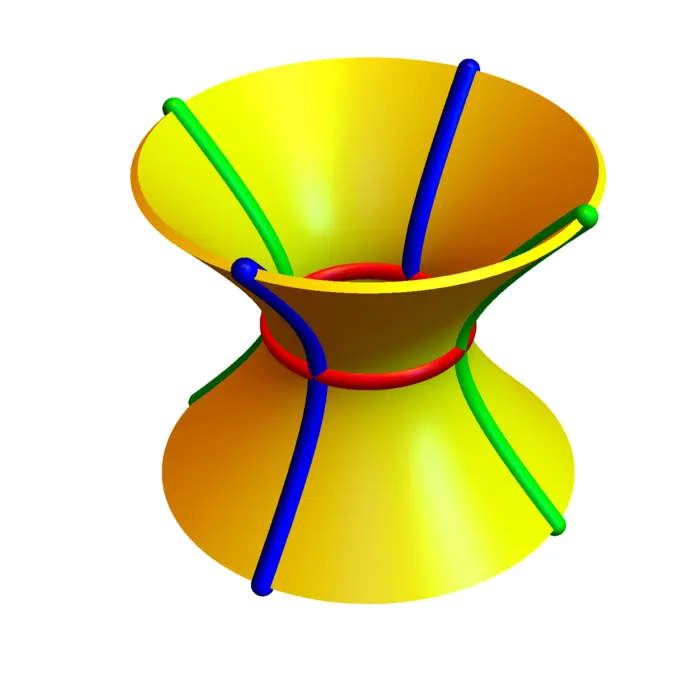
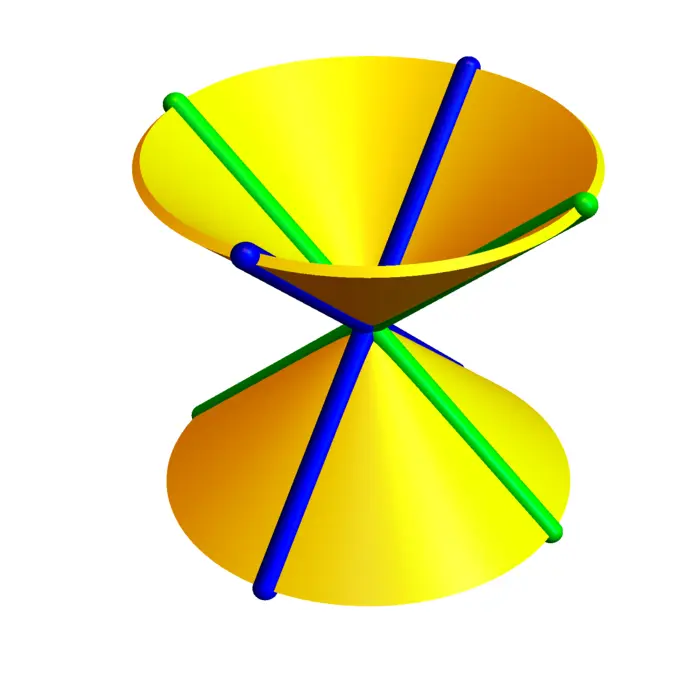
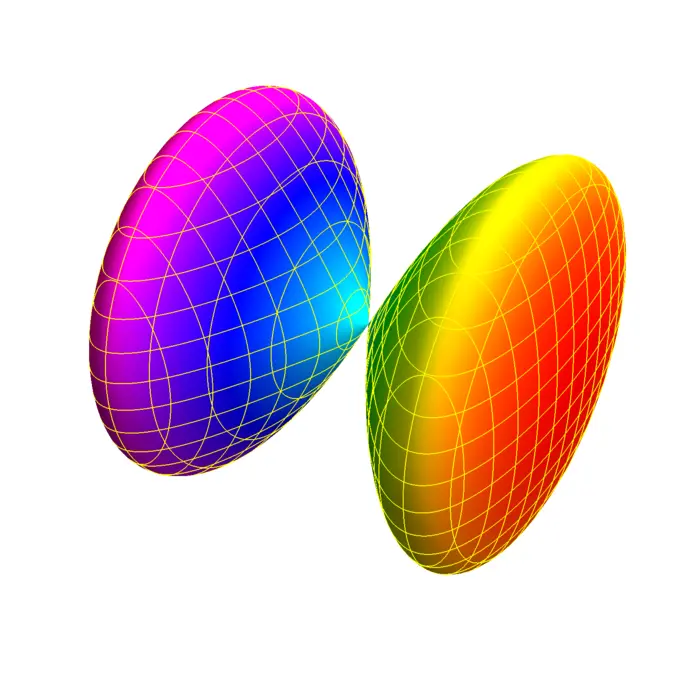
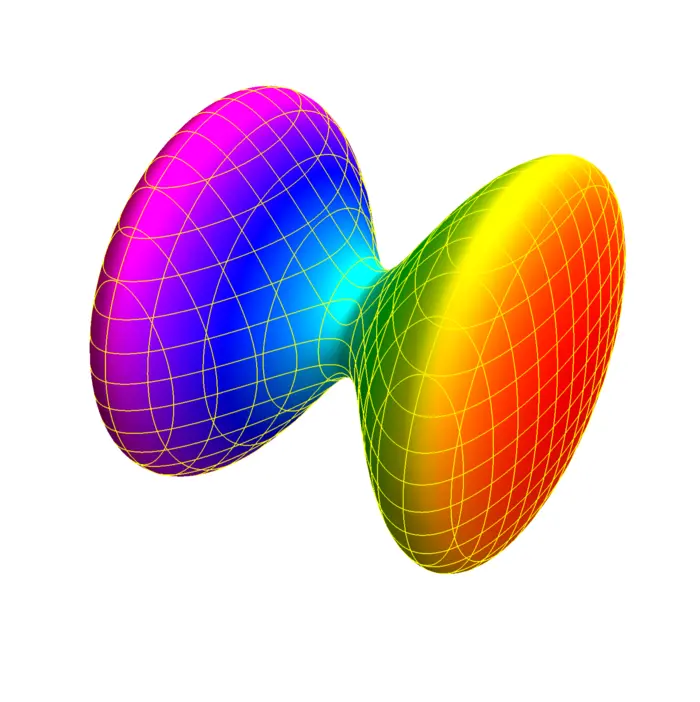
5.2.6 Hyperboloïdes
Pour et , on obtient un hyperboloïde à une nappe . Pour et , on obtient un hyperboloïde à deux nappes . Un hyperboloïde plus général est de la forme avec . L'intersection avec donne dans le cas à une nappe un cercle, dans le cas à deux nappes rien. La trace ou la trace sont toutes deux des hyperboles.
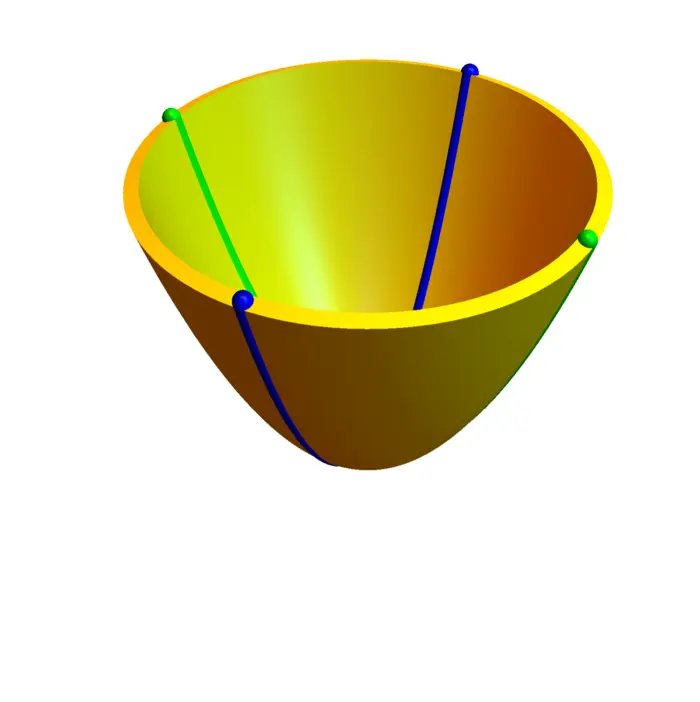
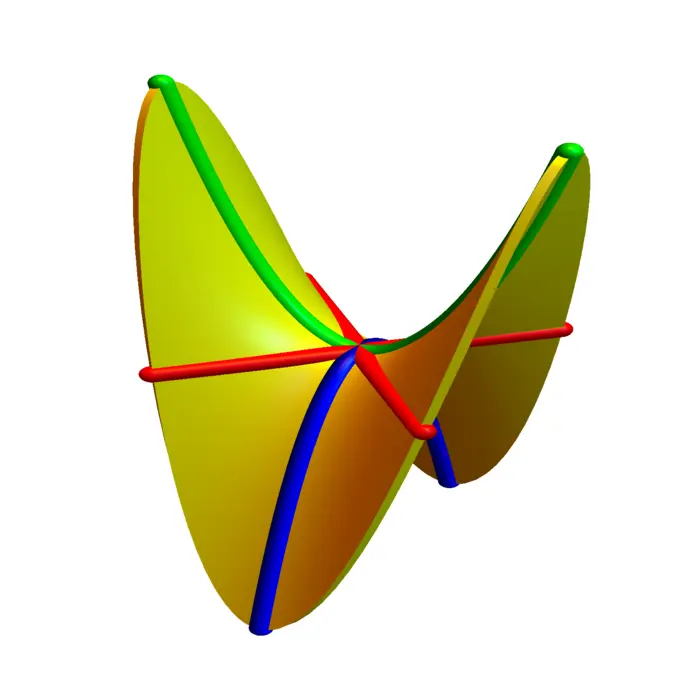
5.2.7 Paraboloïdes
Pour et et , on obtient le paraboloïde , pour et et , on obtient le paraboloïde hyperbolique . On peut reconnaître les paraboloïdes en intersectant avec ou pour voir des paraboles. L'intersection du paraboloïde elliptique avec donne une ellipse. L'intersection du paraboloïde hyperbolique avec donne une hyperbole.
5.2.8 Surfaces spéciales
Si et , on obtient un cône . Pour et , on obtient le cylindre .
5.2.9 Remarque annexe : Structures algébriques et forces
La -sphère et la -sphère portent une multiplication : se trouve dans les nombres complexes et dans les quaternions . La -sphère est le groupe de jauge de l'électromagnétisme, la -sphère (aussi appelée ) est responsable de la force faible. Aucune autre sphère euclidienne ne porte une multiplication pour laquelle est lisse. Michael Atiyah a un jour souligné que cette particularité algébrique n'est peut-être pas une coïncidence et est responsable de la structure du modèle standard des particules élémentaires (l'une des théories les plus précises jamais construites par l'humanité). La force forte apparaît lorsque l'on fait agir un ensemble de matrices sur . Atiyah a suggéré que la gravité pourrait être liée aux octonions . Là, porte encore une multiplication, mais elle n'est plus associative. La liste des algèbres de division normées , , et .1
5.2.10 Surfaces polynomiales : variétés
Étant donné un polynôme à variables, on peut regarder la surface . On l'appelle une variété.
5.3 EXEMPLES
Exemple 1. Q : Trouver le plan contenant la droite et le point .
R : contient et et donc les vecteurs et . Le produit vectoriel entre et est . Il est perpendiculaire à . Donc, l'équation est , où peut être obtenu en insérant un point . Cela donne de sorte que .
Exemple 2. Pouvons-nous identifier la surface ? La complétion du carré donne Maintenant . C'est un hyperboloïde à deux nappes centré en .
Exemple 3. L'intersection du cône avec le plan donne une hyperbole . L'intersection avec donne un cercle . L'intersection avec donne , une parabole. Parce que couper un cône peut donner une hyperbole, une ellipse ou une parabole comme sections, on appelle ces dernières des sections coniques.
Exemple 4. Le cas des variétés quadratiques singulières est encore plus riche : est un hyperboloïde cylindrique, est une union de deux plans et . La surface est une union de deux plans parallèles, la surface est un plan.
EXERCICES
Exercice 1.
- Quel type de courbe est ?
- Quelle surface est ?
- Soit l'ensemble des points pour lesquels . Décrivez cet ensemble.
Exercice 2.
- Quels types de courbes pouvez-vous obtenir lorsque vous intersectez le paraboloïde hyperbolique avec un plan ?
- Explorez ce que vous obtenez si vous intersectez l'hyperboloïde avec le tourné de degrés autour de l'axe des .
Exercice 3. Trouvez des plans explicites qui, lorsqu'ils sont intersectés avec l'hyperboloïde , produisent une ellipse, ou une hyperbole ou une parabole.
Exercice 4. Trouvez l'équation d'un plan qui est tangent aux trois sphères unités centrées en , , .
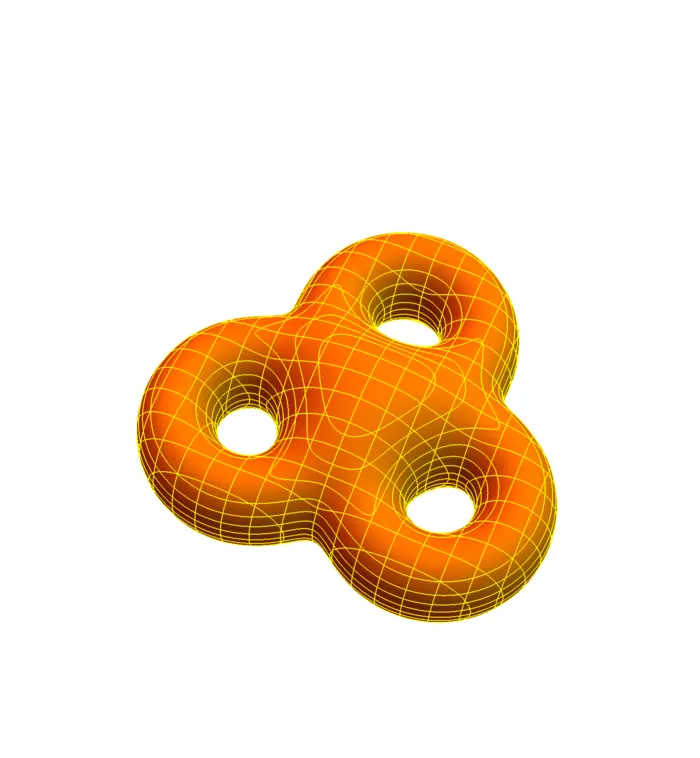
Exercice 5. Construisez une fonction concrète de trois variables telle qu'une surface de niveau soit un bretzel, une surface à trois trous. Indice : la surface est l'union des surfaces et . Maintenant, peut produire des surfaces dans lesquelles les choses sont bien collées. Si vous devez chercher une surface sur le web ou dans la littérature, vous devez donner la référence. Vous pouvez utiliser l'ordinateur pour expérimenter, ou alors décrire votre stratégie avec des mots.

- Voir la conférence de 2010 d'Atiyah (https://www.youtube.com/watch?v=zCCxOE44M_M).↩︎