Tabla de contenidos
- 5.1 INTRODUCCIÓN
- 5.2 LECCIÓN
- 5.2.1 Variedades lineales y espacios
- 5.2.2 Vectores normales y planos
- 5.2.3 Núcleos e imágenes de matrices
- 5.2.4 Explorando superficies no lineales
- 5.2.5 Elipsoides
- 5.2.6 Hiperboloides
- 5.2.7 Paraboloides
- 5.2.8 Superficies especiales
- 5.2.9 Nota al margen: Estructuras algebraicas y fuerzas
- 5.2.10 Superficies polinomiales: Variedades
- 5.3 EJEMPLOS
- EJERCICIOS
5.1 INTRODUCCIÓN
5.1.1 Comprendiendo las superficies
Las superficies son objetos de codimensión uno en un espacio. Son importantes porque pueden dividir el espacio. Podemos confinar agua en una botella. Esto no es posible para codimensión dos. No se puede confinar agua en una curva. De manera similar, si vivieras en un espacio de dimensiones, no podrías almacenar agua en una superficie bidimensional. Pero las cosas pueden complicarse ya en tres dimensiones. Hay superficies bidimensionales cerradas que no confinan ningún espacio. ¡Intenta beber de una botella de Klein!
5.1.2 Describiendo superficies
Una superficie puede describirse matemáticamente de dos maneras fundamentalmente diferentes. O bien se da como una superficie de nivel de una función en ese espacio. O bien puede ser la imagen de un mapa llamado parametrización. Ya conoces esto de la tierra, que es una esfera. Podemos decir que una esfera es el conjunto de puntos que tienen una distancia fija
a su punto central. O bien podemos parametrizar la esfera, por ejemplo usando longitud y latitud. Un plano que pasa por puede darse ya sea como el núcleo de una matriz o bien como la imagen de una matriz . La primera escribe . La segunda escribe el plano como , donde , son los vectores columna de y da los parámetros.
5.2 LECCIÓN
5.2.1 Variedades lineales y espacios
Si es una matriz, el espacio solución de un sistema de ecuaciones se llama una variedad lineal. Es el conjunto de soluciones de trasladado para que pase por uno de los puntos. La ecuación por ejemplo describe una línea en que pasa por y . Las soluciones de forman un espacio lineal, lo que significa que podemos sumar o escalar soluciones y obtener de nuevo soluciones. Podemos reformular lo dicho diciendo que un espacio lineal es una variedad lineal que contiene . Por ejemplo, para obtenemos un plano que es paralelo al plano . El primero es una variedad lineal (también llamada espacio afín), el último es un espacio lineal. Es el espacio solución de con y . Ambos planos son perpendiculares a . Para encontrar una ecuación para el plano que pasa por los puntos , define luego escribe , donde se obtiene sustituyendo un punto. El producto vectorial resulta útil.
5.2.2 Vectores normales y planos
El siguiente ejemplo importante trata con en .
Teorema 1. El vector es perpendicular al plano .
Demostración. Dados dos puntos , en el plano. Entonces tenemos y . Entonces es un vector dentro del plano. Ahora . Esto significa que es perpendicular al vector . ◻
En tres dimensiones, esto significa que el plano tiene un vector normal . Ten esto en cuenta, especialmente porque es nuestro hogar.
5.2.3 Núcleos e imágenes de matrices
Este resultado de dualidad más tarde será identificado como un teorema fundamental del álgebra lineal. Será importante en el ajuste de datos, por ejemplo. El núcleo de una matriz es el espacio lineal de todas las soluciones . El núcleo consiste en todas las raíces de . La imagen de una matriz es el espacio lineal de todos los vectores . Abreviamos para el núcleo y para la imagen. Volveremos a esto más tarde.
Teorema 2. La imagen de es perpendicular al núcleo de .
Demostración. Si está en el núcleo de , entonces . Esto significa que es perpendicular a cada vector fila de . Pero esto significa que es perpendicular al vector columna de . Así que es perpendicular a la imagen de . Esta línea de argumentación puede invertirse para ver que si es perpendicular a la imagen de , entonces está en el núcleo de . ◻
5.2.4 Explorando superficies no lineales
Dada una función , el conjunto solución es una hipersuperficie. A menudo decimos "superficie" aunque "superficie" está reservada para . Las superficies no lineales más simples son las variedades cuadráticas definidas por una matriz simétrica y un vector fila y un escalar . Suponemos que no es la matriz cero, de lo contrario estamos en el caso de una variedad lineal. También podemos suponer que es simétrica . Para la notación, escribimos y .
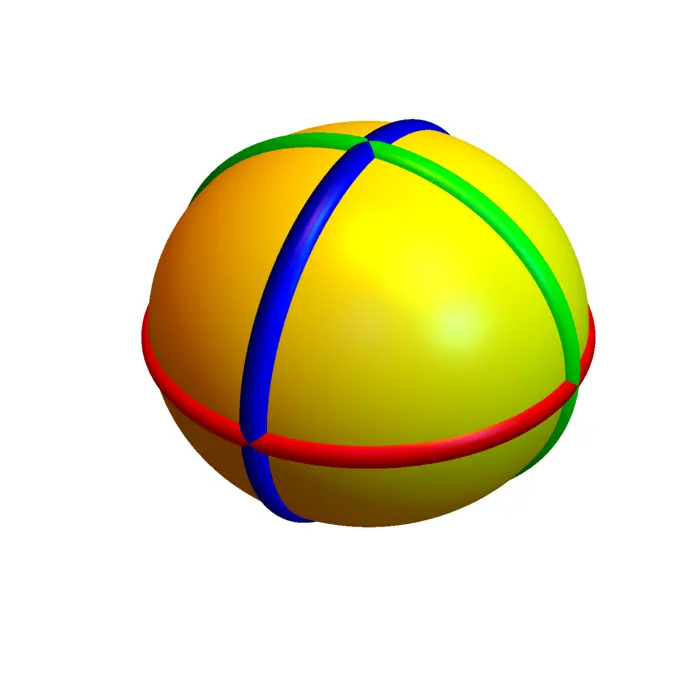
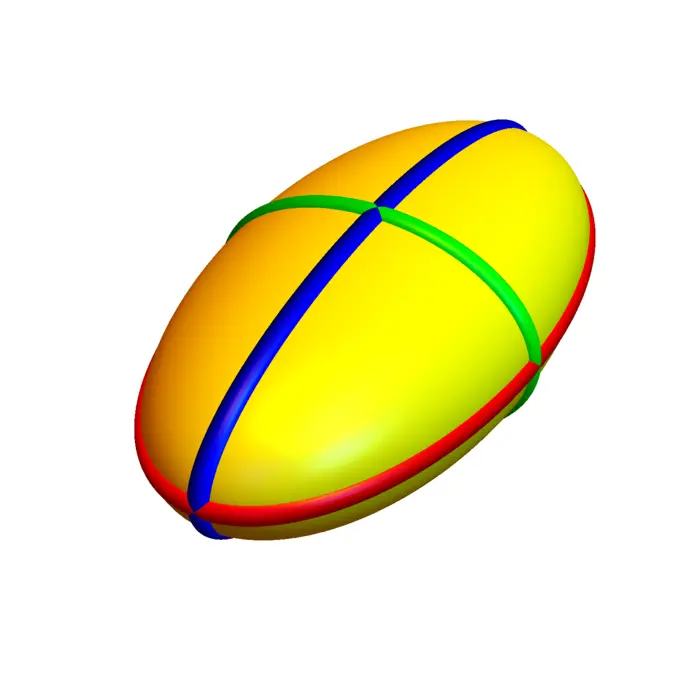
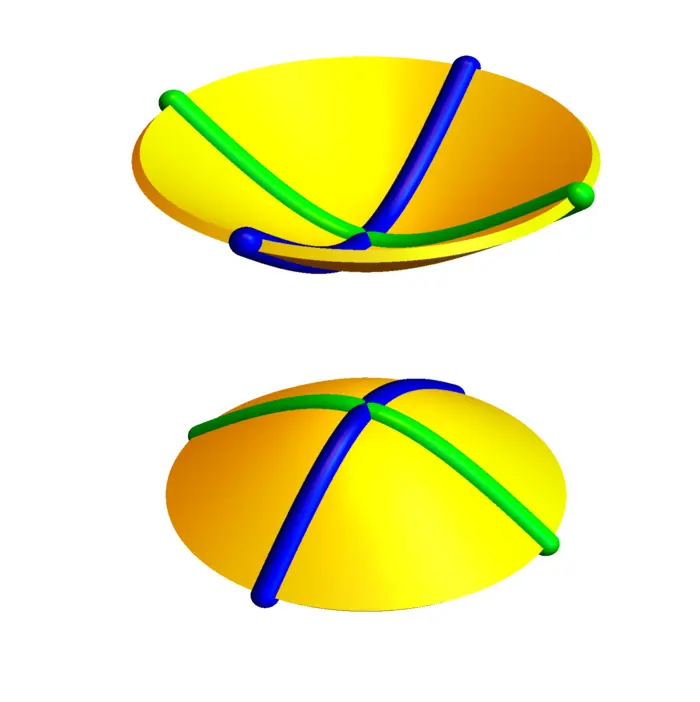
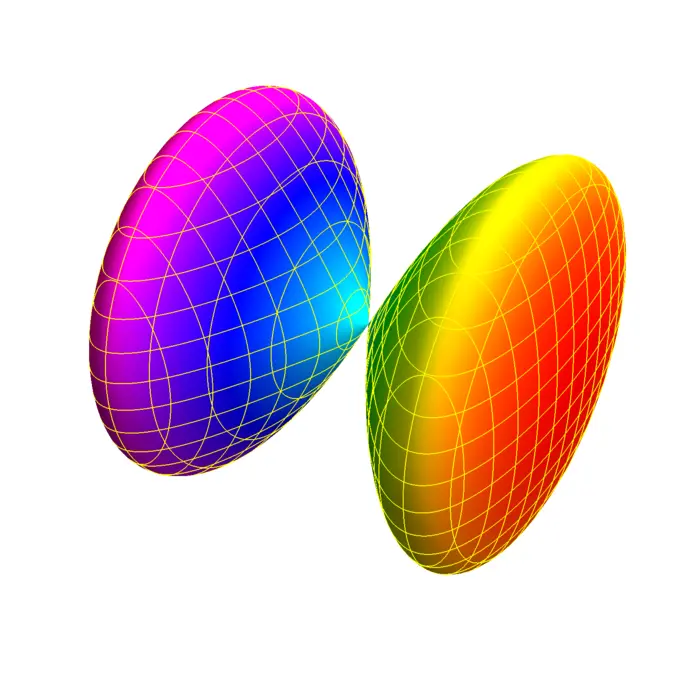
5.2.5 Elipsoides
Para y y obtenemos la esfera . En , una esfera es un círculo . En tres dimensiones tenemos la esfera familiar . Un elipsoide más general con es . Al intersectar con o o , vemos trazas, que son todas elipses.
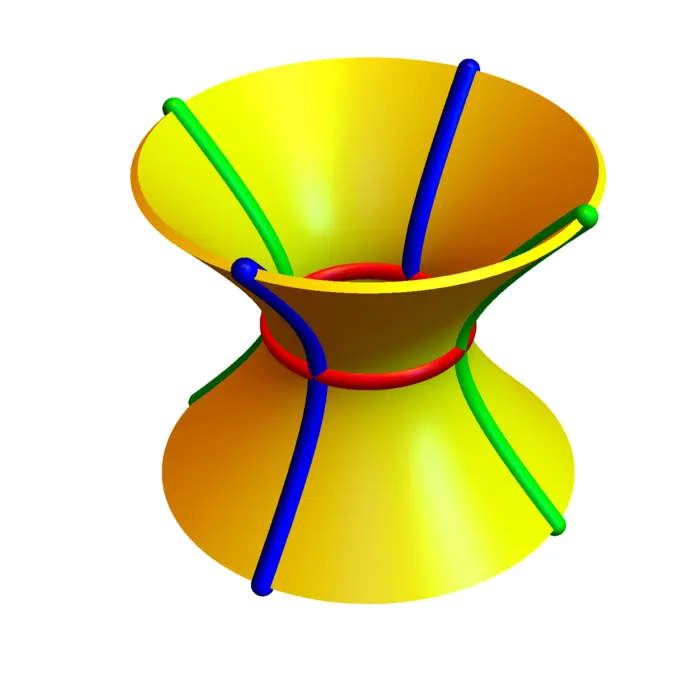
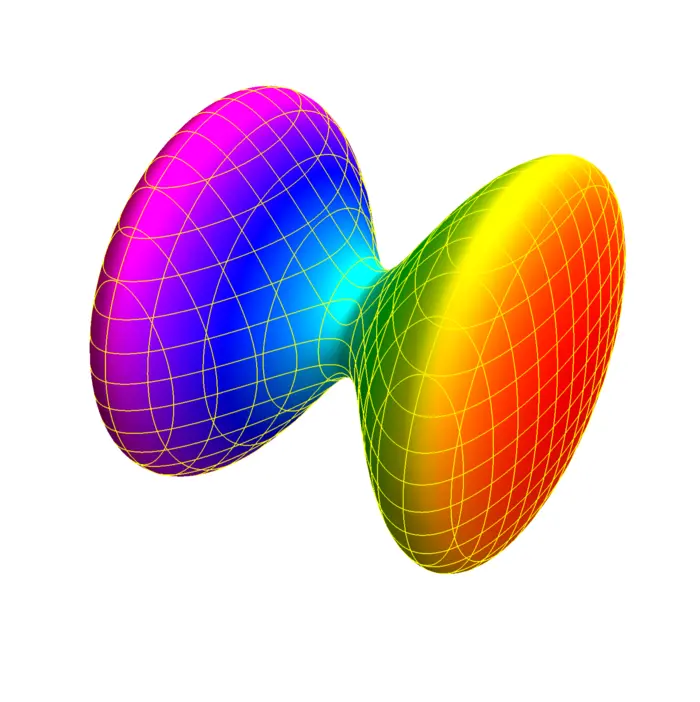
5.2.6 Hiperboloides
Para y , obtenemos un hiperboloide de una hoja . Para y , obtenemos un hiperboloide de dos hojas . Un hiperboloide más general es de la forma con . La intersección con da en el caso de una hoja un círculo, en el caso de dos hojas nada. La traza con o la traza con son ambas hipérbolas.
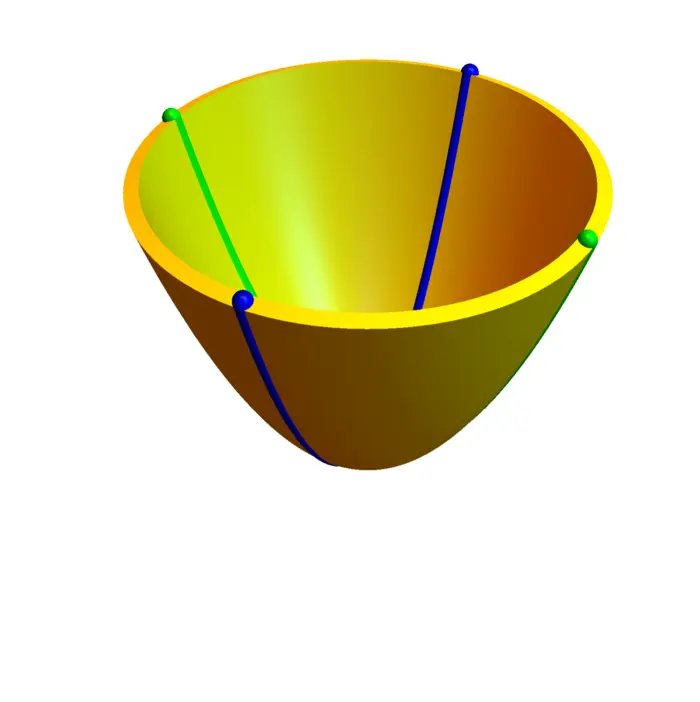
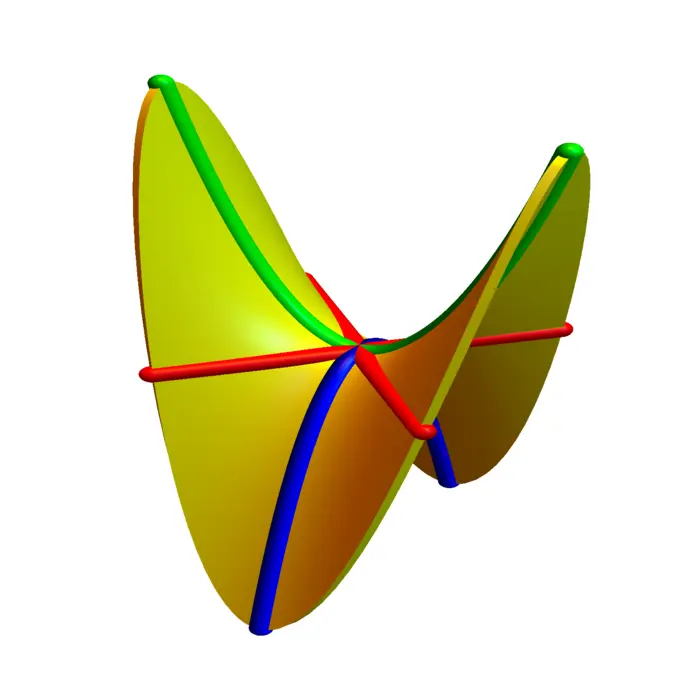
5.2.7 Paraboloides
Para y y obtenemos el paraboloide , para y y obtenemos el paraboloide hiperbólico . Podemos reconocer paraboloides intersectando con o para ver parábolas. La intersección del paraboloide elíptico con da una elipse. La intersección del paraboloide hiperbólico con da una hipérbola.
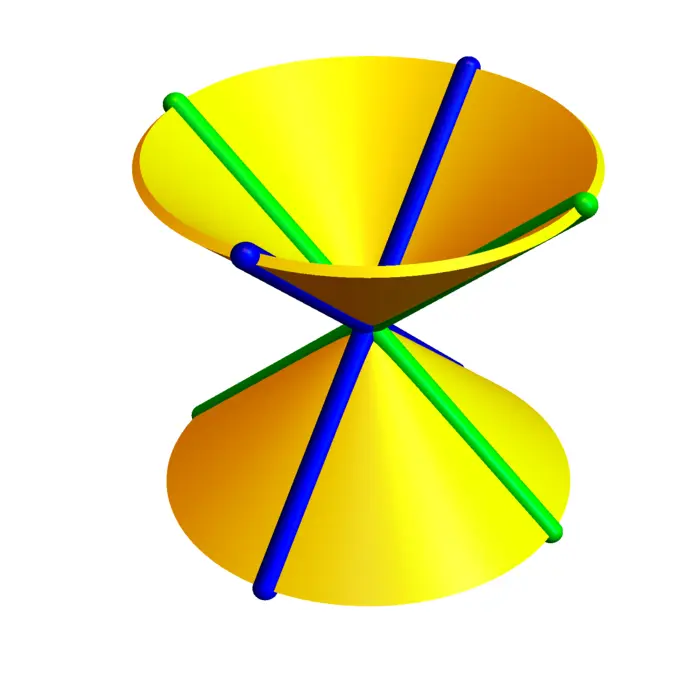
5.2.8 Superficies especiales
Si y , obtenemos un cono . Para y obtenemos el cilindro .
5.2.9 Nota al margen: Estructuras algebraicas y fuerzas
La -esfera y la -esfera llevan una multiplicación: está en los números complejos y está en los cuaterniones . La -esfera es el grupo de calibración para el electromagnetismo, la -esfera (también llamada ) es responsable de la fuerza débil. Ninguna otra esfera euclidiana lleva una multiplicación para la cual sea suave. Michael Atiyah señaló una vez que esta particularidad algebraica podría no ser una coincidencia y ser responsable de la estructura del modelo estándar de partículas elementales (una de las teorías más precisas jamás construidas por la humanidad). La fuerza fuerte aparece cuando se puede hacer que un conjunto de matrices actúe sobre . Atiyah sugirió que la gravedad podría estar relacionada con los octoniones . Allí todavía lleva una multiplicación, pero ya no es asociativa. La lista de álgebras de división normadas , , y .1
5.2.10 Superficies polinomiales: Variedades
Dado un polinomio de variables, se puede considerar la superficie . Se llama una variedad.
5.3 EJEMPLOS
Ejemplo 1. P: Encuentre el plano que contiene la recta y el punto .
R: contiene y y por lo tanto los vectores y . El producto cruz entre y es . Es perpendicular a . Por lo tanto, la ecuación es , donde se puede obtener sustituyendo un punto . Esto da , de modo que .
Ejemplo 2. ¿Podemos identificar la superficie ? Completar el cuadrado da Ahora . Esto es un hiperboloide de dos hojas centrado en .
Ejemplo 3. Intersectando el cono con el plano da una hipérbola . La intersección con da un círculo . Intersectando con da , una parábola. Debido a que al seccionar un cono se pueden obtener una hipérbola, una elipse o una parábola como cortes, a estas últimas se les llama secciones cónicas.
Ejemplo 4. El caso de las variedades cuadráticas singulares es aún más rico: es un hiperboloide cilíndrico, es la unión de dos planos y . La superficie es la unión de dos planos paralelos, la superficie es un plano.
EJERCICIOS
Ejercicio 1.
- ¿Qué tipo de curva es ?
- ¿Qué superficie es ?
- Sea el conjunto de puntos para los cuales . Describa este conjunto.
Ejercicio 2.
- ¿Qué tipo de curvas se pueden obtener al intersectar el paraboloide hiperbólico con un plano?
- Explore qué obtiene si intersecta el hiperboloide con el rotado grados alrededor del eje .
Ejercicio 3. Encuentre planos explícitos que al intersectarse con el hiperboloide produzcan una elipse, una hipérbola o una parábola.
Ejercicio 4. Encuentre la ecuación de un plano que sea tangente a las tres esferas unitarias centradas en , , .
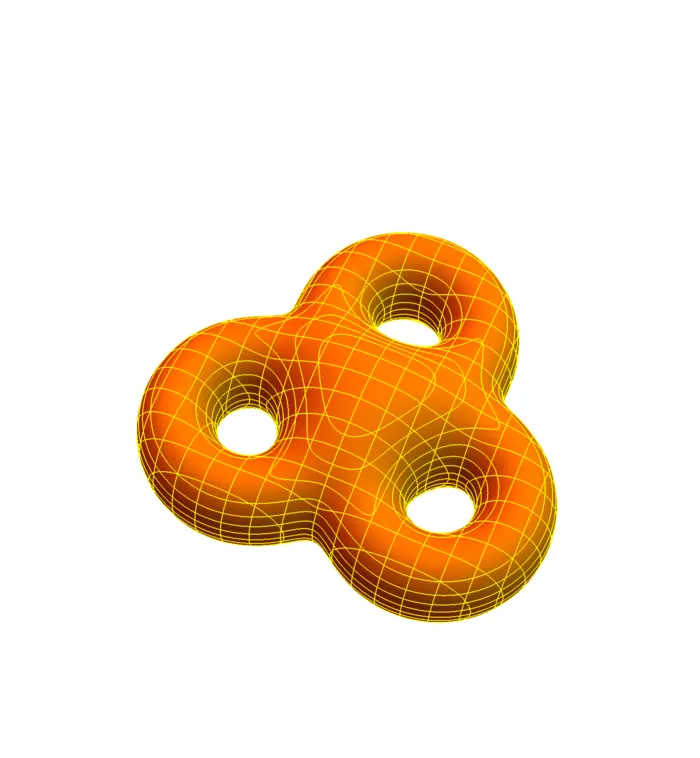
Ejercicio 5. Construya una función concreta de tres variables tal que alguna superficie de nivel sea un pretzel, una superficie con tres agujeros. Sugerencia: la superficie es la unión de las superficies y . Ahora, puede producir superficies en las que las cosas se pegan de manera elegante. Si consulta alguna superficie en la web o en la literatura, debe dar la referencia. Puede usar la computadora para experimentar, o describir su estrategia con palabras.

- Vea la charla de 2010 de Atiyah (https://www.youtube.com/watch?v=zCCxOE44M_M).↩︎