Índice
- 7.1 INTRODUÇÃO
- 7.2 AULA
- 7.2.1 Curvas Parametrizadas e Seus Caminhos
- 7.2.2 Velocidade e Aceleração em Curvas
- 7.2.3 O Teorema Fundamental do Cálculo e Curvas
- 7.2.4 Vetores Tangente, Normal e Binormal
- 7.2.5 Singularidades de Curvatura e Suavidade
- 7.2.6 Mudanças de Concavidade e Vetores Normais
- 7.2.7 Observação: Curvas com Valores Matriciais
- 7.2.8 Observação: Curvas Fechadas Simples
- 7.2.9 Observação: Reparametrização com Velocidade Constante
- 7.2.10 Observação: Complexidades das Curvas Contínuas
- 7.3 EXEMPLOS
- EXERCÍCIOS
7.1 INTRODUÇÃO
7.1.1 Curvas em Álgebra Linear
Muitos objetos geométricos podem receber uma dimensão. Este número nos diz quantos parâmetros precisamos para descrever o objeto. Um ponto tem dimensão , uma reta tem dimensão , um plano tem dimensão . Isso é formalizado na álgebra linear. Dada uma matriz , o número de líderes é a dimensão da imagem de . O número de variáveis livres (colunas sem líder em ) é a dimensão do núcleo de . Por exemplo, para que já está na forma escalonada reduzida, temos um líder e duas variáveis livres e . A equação descreve um objeto de dimensão , um plano. Se são dados, podemos encontrar a partir da equação. A imagem do vetor coluna é a reta gerada por este vetor. Esta reta é perpendicular ao plano e ilustra o teorema fundamental da álgebra linear, garantindo que o núcleo de é perpendicular à imagem de , ou equivalentemente, o núcleo de é perpendicular à imagem de .
7.1.2 Dimensionalidade e Curvas
Curvas são objetos de dimensão . Por exemplo, a reta gerada por um vetor é escrita como o conjunto de pontos . Chamamos isso de parametrização da reta. A variável livre é chamada de tempo. Ela determina onde estamos localizados em um instante fixo . No instante , por exemplo, estamos posicionados no ponto correspondente ao vetor .1 O vetor tem a interpretação de uma velocidade. Ele nos diz quão rápido nos movemos na reta. Claro, substituir por nos daria a mesma reta, mas viajaríamos três vezes mais rápido e alcançaríamos o ponto três vezes mais rápido.
7.1.3 Explorando Curvas no Espaço
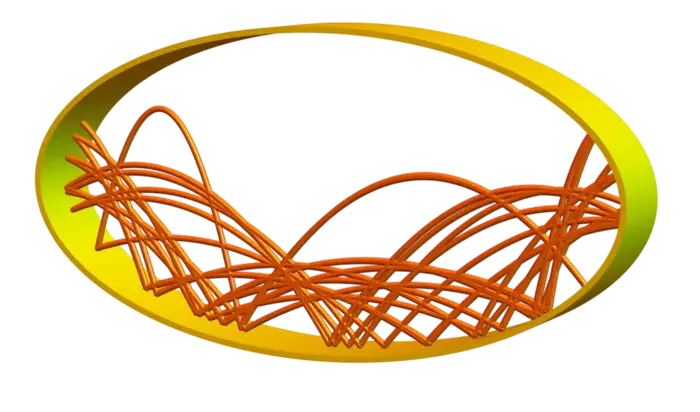
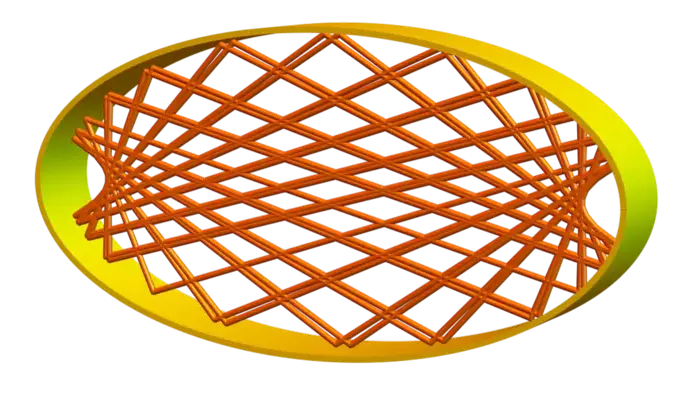
Se a velocidade pode mudar de direção e comprimento, podemos percorrer caminhos mais interessantes. A estrutura é tomar três funções contínuas e olhar para o caminho no espaço. Escrevemos isso em notação vetorial como . Agora, como nos cansamos de sempre escrever o indicando que usamos vetores coluna, vamos apenas escrever . Na maioria das vezes, supomos que as funções são diferenciáveis, mas o caso de uma bola de pingue-pongue quicando em uma mesa mostra que curvas não suaves também podem importar, mesmo na vida cotidiana. As curvas podem ser muito complicadas. Pegue uma bola de pingue-pongue e coloque-a em um recipiente elíptico. A trajetória de bilhar que ela traça é caótica. Nesta aula, olhamos para curvas dadas por parametrizações, aprendemos a derivar para obter a velocidade ou a aceleração. Também aprendemos a integrar. Isso nos permite calcular caminhos. Podemos, por exemplo, calcular onde uma bola caindo em um campo gravitacional está no instante .
7.2 AULA
7.2.1 Curvas Parametrizadas e Seus Caminhos
Dadas funções contínuas de uma variável , podemos olhar para a função de valor vetorial . Chamamos isso de curva parametrizada. Um exemplo é que é uma reta passando pelo ponto e contendo o vetor .2 Se está no intervalo de parâmetro , então a imagem de é , que define uma curva em . A curva começa no ponto e termina no ponto . Outro exemplo importante é o círculo , onde está no intervalo . Sua imagem é um círculo no plano . A parametrização contém mais informações do que a própria curva: a curva parabólica definida em , por exemplo, é a mesma que a curva para , mas na segunda parametrização, a curva é percorrida com velocidade diferente. Curvas em podem ser admiradas em nosso espaço físico, como que é uma espiral. Esta curva particular está contida no cone .
7.2.2 Velocidade e Aceleração em Curvas
Se as funções são diferenciáveis, podemos formar a derivada r^{\prime}(t)=\left[x_{1}^{\prime}(t), \ldots, x_{n}^{\prime}(t)\right]. Embora tecnicamente isso seja novamente uma curva, pensamos em r^{\prime}(t) como um vetor anexado ao ponto e dizemos que r^{\prime}(t) é tangente a . O comprimento \left|r^{\prime}(t)\right| da velocidade é chamado de rapidez de . Se também existirem derivadas superiores das funções , podemos formar a segunda derivada r^{\prime \prime}(t) chamada de aceleração, ou a terceira derivada r^{\prime \prime \prime}(t)=r^{(3)}(t) chamada de arranque. Depois vêm estalo , crepitação e estouro e o Harvard introduzido no outono de 2016 em um exame multivariável.
7.2.3 O Teorema Fundamental do Cálculo e Curvas
Dada a função derivada primeira r^{\prime}(t) bem como o ponto inicial , podemos recuperar a função graças ao teorema fundamental do cálculo. Por causa da lei de Newton, que diz que um ponto de massa sujeito a um campo de força dependendo da posição e da velocidade satisfaz a equação diferencial newtoniana m r^{\prime \prime}(t)=F\left(r(t), r^{\prime}(t)\right), o seguinte resultado é importante:
Teorema 1. é determinado unicamente a partir de r^{\prime \prime}(t) e e r^{\prime}(0).
Prova. Em cada coordenada, obtemos x_{k}^{\prime}(t)=\int_{0}^{t} x_{k}^{\prime \prime}(s)\,ds + x_{k}^{\prime}(0)\quad \text{ e }\quad x_{k}(t)=\int_{0}^{t} x_{k}^{\prime}(s)\,ds+x_{k}(0). Acabamos de aplicar duas vezes o teorema fundamental do cálculo. ◻
Um caso especial é se r^{\prime \prime}(t) é constante. Um caso especial é a situação de queda livre. As funções coordenadas são então quadráticas. Suponha r^{\prime \prime}(t)=[0,0,-10], e r^{\prime}(0)=[0,0,0] e , então . Se você pular de metros em uma piscina, você precisa de segundos para atingir a água.
7.2.4 Vetores Tangente, Normal e Binormal
Dada uma curva para a qual a velocidade r^{\prime}(t) nunca é zero, podemos formar o vetor tangente unitário T(t)=r^{\prime}(t) /|r^{\prime}(t)|. Se T^{\prime}(t) nunca é zero, podemos então formar N(t)=T^{\prime}(t) /|T^{\prime}(t)|, o vetor normal. O vetor é chamado de vetor binormal. O escalar |T^{\prime}(t)| /|r^{\prime}(t)| é chamado de curvatura da curva.
Teorema 2. Em , temos K=|T^{\prime}| /|r^{\prime}|=|r^{\prime} \times r^{\prime \prime}| /|r^{\prime}|^{3}.
Prova. Faremos este cálculo em aula. ◻
7.2.5 Singularidades de Curvatura e Suavidade
Mesmo que seja perfeitamente suave, a curvatura pode se tornar infinita. Vejamos o exemplo . Então r^{\prime}(t)=[2 t, 3 t^{2}, 0] e r^{\prime \prime}(t)=[2,6 t, 0] e r^{\prime}(t) \times r^{\prime \prime}(t)=[0,0,6 t^{2}]. A curvatura é que tem uma singularidade em .
7.2.6 Mudanças de Concavidade e Vetores Normais
Mesmo quando é perfeitamente suave e nunca zero, o vetor normal pode depender de forma descontínua de . Exemplo: . Agora r^{\prime}(t)=[1, t^{2}] e . Vemos que T^{\prime}(t) assume sinais diferentes na segunda coordenada. Após a normalização, temos e . No ponto de inflexão do gráfico da função cúbica, a concavidade mudou de côncava para baixo para côncava para cima. Isso mudou a direção do vetor normal .
7.2.7 Observação: Curvas com Valores Matriciais
Até agora, olhamos apenas para vetores parametrizados. Se as entradas de uma matriz dependem do tempo, temos uma curva de valor matricial . Isso aparece em equações diferenciais, em mecânica quântica (operadores que se movem no tempo) ou –mais importante– em imagens em movimento! Um filme é apenas uma curva de valor matricial.
7.2.8 Observação: Curvas Fechadas Simples
Uma curva plana no plano definida em é chamada de curva fechada simples se e não existem valores para os quais . Para uma curva suave, significando que as duas primeiras derivadas existem, podemos olhar para o ângulo polar do vetor r^{\prime}(t). Defina a curvatura com sinal da curva como \kappa(t)=\alpha^{\prime}(t) /|r^{\prime}(t)|. Temos . O Hopf Umlaufsatz diz . No caso do círculo, por exemplo, .
7.2.9 Observação: Reparametrização com Velocidade Constante
Podemos verificar que qualquer curva parametrizada em tal que r^{\prime}(t) \neq 0 para todo pode ser reparametrizada como em de modo que |R^{\prime}(t)|=1 para todo .
Prova: procuramos uma função monótona tal que a derivada de tenha comprimento . Isso significa que queremos |r^{\prime}(s(t))| s^{\prime}(t)=1. Em outras palavras, procuramos uma função tal que s^{\prime}(t)=1 /|r^{\prime}(s(t))|=F(s(t)) e . Isso é o que chamamos de equação diferencial. Existe um teorema geral de existência para equações diferenciais (provado posteriormente) que garante que existe uma única solução . Fim da prova.
O resultado é muito intuitivo. Você pode ir de a ao longo da curva traçada por simplesmente mantendo a velocidade . Isso fornece sua nova parametrização. Seu novo intervalo de tempo será onde é o comprimento de arco (o comprimento da sua viagem). Abordaremos o cálculo do comprimento de arco na próxima aula.
7.2.10 Observação Lateral: Complexidades das Curvas Contínuas
Curvas contínuas podem ser complicadas: se você observar uma partícula de pólen em um microscópio, ela se move erraticamente em uma curva que não é diferenciável em lugar nenhum, pois é constantemente bombardeada por moléculas de ar que a fazem quicar. Isso é o movimento browniano. Existem também as curvas de Peano ou curvas de Hilbert ou curvas de Hilbert que preenchem o espaço que cobrem todos os pontos do cubo . Essas curvas definem uma bijeção contínua de para . (A inversa não é contínua. Ainda assim, a construção mostra que há o mesmo número de pontos em que em ).
7.3 EXEMPLOS
Exemplo 1. Supondo as equações de Newton m r^{\prime \prime}(t)=F(t), encontre a trajetória de um corpo de massa sujeito a uma força com e r^{\prime}(0)=[1,2,7].
Solução: temos r^{\prime \prime}(t)=[2 \sin (t), 2 \cos (t),-20]. A integração fornece r^{\prime}(t)=[-2 \cos (t), 2 \sin (t),-20 t]+\left[c_{1}, c_{2}, c_{3}\right]. Ajustando as constantes, obtemos r^{\prime}(t)=[3-2 \cos (t), 2+2 \sin (t), 7-20 t]. Uma segunda integração fornece com outras constantes . Comparando obtemos
Exemplo 2. Seja . Então r^{\prime}(t)=[-L \sin (t), L \cos (t), 0] \quad \text{e} \quad r^{\prime \prime}(t)= [-L \cos (t),-L \cos (t), 0] e r^{\prime}(t) \times r^{\prime \prime}(t)=\left[0,0, L^{2}\right] \quad \text{e} \quad \left|r^{\prime}(t)\right|=L. De modo que |r^{\prime}(t) \times r^{\prime \prime}(t)|/| r^{\prime}(t)|^{3}=1 / L. Um círculo de raio tem curvatura !
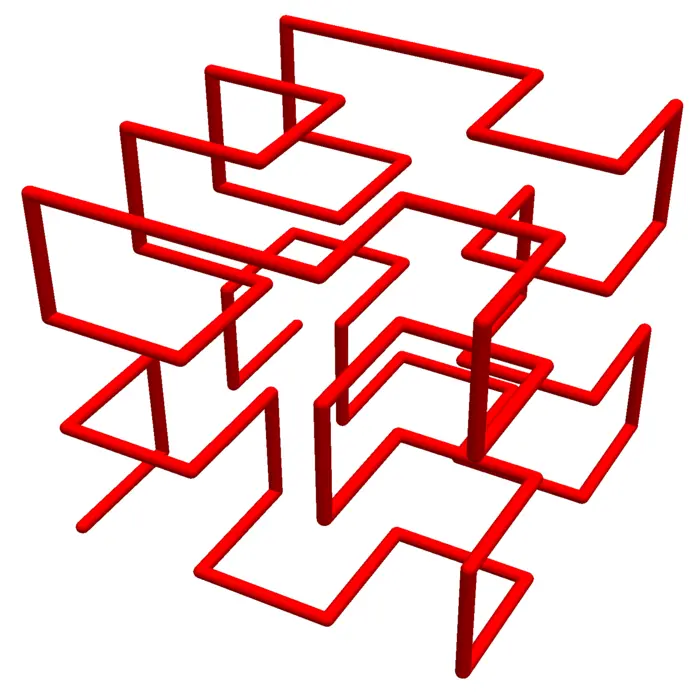
Exemplo 3. Uma curva fechada simples em é um nó. Para quaisquer inteiros positivos , , podemos considerar o nó tórico A curvatura total de um nó é definida como . Veja a Figura (7.3).3
EXERCÍCIOS
Exercício 1. Você está sentado em um banco em perto do Charles congelado, localizado entre Winthrop e Elliot, e atira pedras mirando em , um ponto próximo à Harvard Business School. Para não se meter em problemas, assumimos que tudo acontece em nossa imaginação e que a pedra não sofre atrito. Você usa um estilingue e lança com velocidade inicial r^{\prime}(0)=[0,-24,61], assume que a aceleração gravitacional é r^{\prime \prime}(t)=[0,0,-10] em todos os instantes e usa metros para distância e segundos para o tempo. Em que ponto a pedra atinge a marca de metros de altura enquanto desce? [Opcional: você gosta de um desafio e quer quicar na superfície de gelo em e atingir o ponto . Que velocidade inicial em consegue isso?]
Exercício 2. Queremos produzir um logotipo para uma nova empresa e estamos experimentando. Desenhe a curva e encontre a velocidade, aceleração e curvatura em .
Exercício 3. Parametrize a curva obtida pela interseção do cilindro com o plano .
Exercício 4. Verifique que o nó tórico está contido no toro
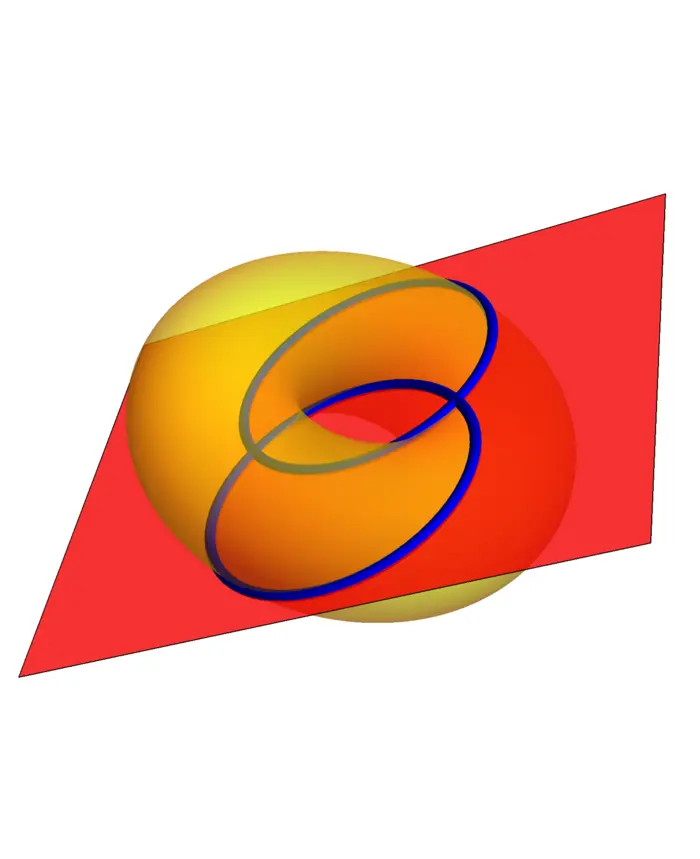
Exercício 5. Você fatia um bagel de uma maneira não convencional. Vamos supor que o bagel seja dado por Verifique que, se intersectarmos este toro com o plano , obtemos os círculos de Villarceau bem como o círculo
