Índice
- 7.1 INTRODUCCIÓN
- 7.2 LECCIÓN
- 7.2.1 Curvas Parametrizadas y Sus Trayectorias
- 7.2.2 Velocidad y Aceleración en Curvas
- 7.2.3 El Teorema Fundamental del Cálculo y las Curvas
- 7.2.4 Vectores Tangente, Normal y Binormal
- 7.2.5 Singularidades de Curvatura y Suavidad
- 7.2.6 Cambios de Concavidad y Vectores Normales
- 7.2.7 Comentario Adicional: Curvas de Valores Matriciales
- 7.2.8 Comentario Adicional: Curvas Cerradas Simples
- 7.2.9 Comentario Adicional: Reparametrización a Velocidad Constante
- 7.2.10 Comentario Adicional: Complejidades de las Curvas Continuas
- 7.3 EJEMPLOS
- EJERCICIOS
7.1 INTRODUCCIÓN
7.1.1 Curvas en el Álgebra Lineal
A muchos objetos geométricos se les puede asignar una dimensión. Este número indica cuántos parámetros necesitamos para describir el objeto. Un punto tiene dimensión , una línea tiene dimensión , un plano tiene dimensión . Esto se formaliza en el álgebra lineal. Dada una matriz , el número de principales en es la dimensión de la imagen de . El número de variables libres (columnas sin principal en ) es la dimensión del núcleo de . Por ejemplo, para que ya está en forma escalonada reducida por filas, tenemos un principal y dos variables libres y . La ecuación describe un objeto de dimensión , un plano. Si se dan , podemos encontrar a partir de la ecuación. La imagen del vector columna es la línea generada por este vector. Esta línea es perpendicular al plano e ilustra el teorema fundamental del álgebra lineal, que asegura que el núcleo de es perpendicular a la imagen de o, equivalentemente, el núcleo de es perpendicular a la imagen de .
7.1.2 Dimensionalidad y Curvas
Las curvas son objetos de dimensión . Por ejemplo, la línea generada por un vector se escribe como el conjunto de puntos . A esto lo llamamos una parametrización de la línea. La variable libre se llama tiempo. Determina dónde estamos ubicados en un tiempo fijo . En el tiempo , por ejemplo, estamos posicionados en el punto correspondiente al vector .1 El vector tiene la interpretación de una velocidad. Nos dice qué tan rápido nos movemos sobre la línea. Por supuesto, reemplazar con nos daría la misma línea, pero viajaríamos tres veces más rápido y alcanzaríamos el punto tres veces más rápido.
7.1.3 Explorando Curvas en el Espacio
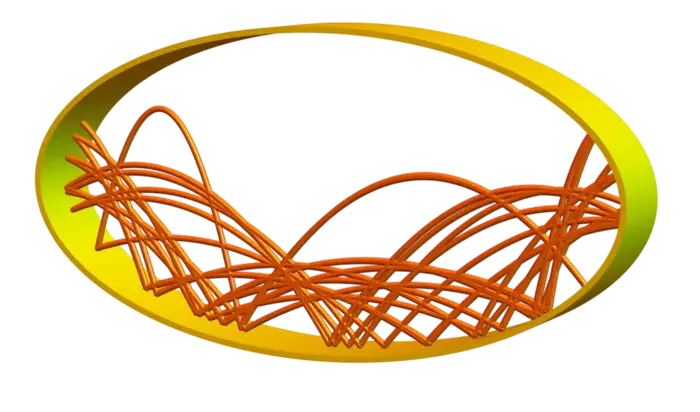
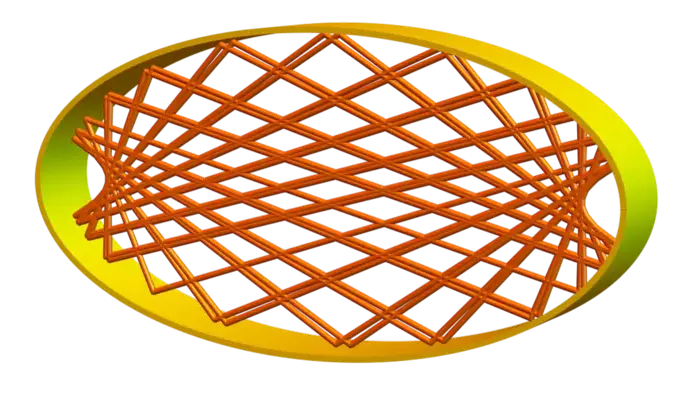
Si la velocidad puede cambiar de dirección y magnitud, podemos movernos en trayectorias más interesantes. El marco de trabajo es tomar tres funciones continuas y observar la trayectoria en el espacio. Escribimos esto en notación vectorial como . Ahora, como nos cansamos de escribir siempre el que indica que usamos vectores columna, simplemente escribiremos . La mayor parte del tiempo, asumimos que las funciones son diferenciables, pero el caso de una pelota de ping-pong rebotando en una mesa muestra que también las curvas no suaves pueden importar, incluso en la vida diaria. Las curvas pueden ser muy complicadas. Toma una pelota de ping-pong y colócala en un contenedor elíptico. La trayectoria de billar que traza es caótica. En esta lección observamos curvas dadas por parametrizaciones, aprendemos a derivar para obtener la velocidad o la aceleración. También aprendemos a integrar. Esto nos permite calcular trayectorias. Podemos, por ejemplo, calcular dónde está una bola que cae en un campo gravitatorio en el tiempo .
7.2 LECCIÓN
7.2.1 Curvas Parametrizadas y Sus Trayectorias
Dadas funciones continuas de una variable , podemos considerar la función de valor vectorial . La llamamos una curva parametrizada. Un ejemplo es que es una línea que pasa por el punto y contiene el vector .2 Si está en el intervalo paramétrico , entonces la imagen de es , lo que define una curva en . La curva comienza en el punto y termina en el punto . Otro ejemplo importante es el círculo , donde está en el intervalo . Su imagen es un círculo en el plano . La parametrización contiene más información que la curva en sí: la curva parabólica definida en , por ejemplo, es la misma que la curva para , pero en la segunda parametrización, la curva se recorre con diferente velocidad. Las curvas en pueden admirarse en nuestro espacio físico, como que es una espiral. Esta curva en particular está contenida en el cono .
7.2.2 Velocidad y Aceleración en Curvas
Si las funciones son diferenciables, podemos formar la derivada r^{\prime}(t)=\left[x_{1}^{\prime}(t), \ldots, x_{n}^{\prime}(t)\right]. Aunque técnicamente esto es nuevamente una curva, pensamos en r^{\prime}(t) como un vector unido al punto y decimos que r^{\prime}(t) es tangente a . La longitud \left|r^{\prime}(t)\right| de la velocidad se llama la rapidez de . Si también existen derivadas superiores de las funciones , podemos formar la segunda derivada r^{\prime \prime}(t) llamada aceleración, o la tercera derivada r^{\prime \prime \prime}(t)=r^{(3)}(t) llamada sacudida. Luego vienen el tirón , el chasquido y el pop y el Harvard introducido en el otoño de 2016 en un examen de varias variables.
7.2.3 El Teorema Fundamental del Cálculo y las Curvas
Dada la función primera derivada r^{\prime}(t) así como el punto inicial , podemos recuperar la función gracias al teorema fundamental del cálculo. Debido a la ley de Newton, que dice que un punto de masa sujeto a un campo de fuerza que depende de la posición y la velocidad satisface la ecuación diferencial newtoniana m r^{\prime \prime}(t)=F\left(r(t), r^{\prime}(t)\right), el siguiente resultado es importante:
Teorema 1. se determina de manera única a partir de r^{\prime \prime}(t) y y r^{\prime}(0).
Demostración. En cada coordenada obtenemos x_{k}^{\prime}(t)=\int_{0}^{t} x_{k}^{\prime \prime}(s)\,ds + x_{k}^{\prime}(0)\quad \text{ y }\quad x_{k}(t)=\int_{0}^{t} x_{k}^{\prime}(s)\,ds+x_{k}(0). Hemos aplicado dos veces el teorema fundamental del cálculo. ◻
Un caso especial es si r^{\prime \prime}(t) es constante. Un caso especial es la situación de caída libre. Las funciones coordenadas son entonces cuadráticas. Supongamos r^{\prime \prime}(t)=[0,0,-10], y r^{\prime}(0)=[0,0,0] y , entonces . Si saltas desde metros a una piscina, necesitas segundos para tocar el agua.
7.2.4 Vectores Tangente, Normal y Binormal
Dada una curva para la cual la velocidad r^{\prime}(t) nunca es cero, podemos formar el vector tangente unitario T(t)=r^{\prime}(t) /|r^{\prime}(t)|. Si T^{\prime}(t) nunca es cero, podemos formar entonces N(t)=T^{\prime}(t) /|T^{\prime}(t)|, el vector normal. El vector se llama el vector binormal. El escalar |T^{\prime}(t)| /|r^{\prime}(t)| se llama la curvatura de la curva.
Teorema 2. En , tenemos K=|T^{\prime}| /|r^{\prime}|=|r^{\prime} \times r^{\prime \prime}| /|r^{\prime}|^{3}.
Demostración. Haremos este cálculo en clase. ◻
7.2.5 Singularidades de Curvatura y Suavidad
Incluso si es perfectamente suave, la curvatura puede volverse infinita. Veamos el ejemplo . Entonces r^{\prime}(t)=[2 t, 3 t^{2}, 0] y r^{\prime \prime}(t)=[2,6 t, 0] y r^{\prime}(t) \times r^{\prime \prime}(t)=[0,0,6 t^{2}]. La curvatura es que tiene una singularidad en .
7.2.6 Cambios de Concavidad y Vectores Normales
Incluso cuando es perfectamente suave y nunca cero, el vector normal puede depender de manera discontinua de . Ejemplo: . Ahora r^{\prime}(t)=[1, t^{2}] y . Vemos que T^{\prime}(t) toma signos diferentes en la segunda coordenada. Después de normalizar tenemos y . En el punto de inflexión de la gráfica de la función cúbica, la concavidad ha cambiado de cóncava hacia abajo a cóncava hacia arriba. Esto ha cambiado la dirección del vector normal .
7.2.7 Comentario Adicional: Curvas de Valores Matriciales
Hemos considerado solo vectores parametrizados. Si las entradas de una matriz dependen del tiempo, tenemos una curva de valores matriciales . Esto aparece en ecuaciones diferenciales, en mecánica cuántica (operadores que se mueven en el tiempo) o –lo más importante– ¡en imágenes en movimiento! Una película es simplemente una curva de valores matriciales.
7.2.8 Comentario Adicional: Curvas Cerradas Simples
Una curva plana en el plano, definida en , se llama una curva cerrada simple si y no existen valores para los cuales . Para una curva suave, lo que significa que existen las dos primeras derivadas, podemos considerar el ángulo polar del vector r^{\prime}(t). Se define la curvatura con signo de la curva como \kappa(t)=\alpha^{\prime}(t) /|r^{\prime}(t)|. Tenemos . El Umlaufsatz de Hopf dice . En el caso del círculo, por ejemplo, .
7.2.9 Comentario Adicional: Reparametrización a Velocidad Constante
Podemos verificar que cualquier curva parametrizada en tal que r^{\prime}(t) \neq 0 para todo puede reparametrizarse como en de modo que |R^{\prime}(t)|=1 para todo .
Demostración: buscamos una función monótona tal que la derivada de tenga longitud . Esto significa que queremos |r^{\prime}(s(t))| s^{\prime}(t)=1. En otras palabras, buscamos una función tal que s^{\prime}(t)=1 /|r^{\prime}(s(t))|=F(s(t)) y . Esto es lo que llamamos una ecuación diferencial. Existe un teorema general de existencia para ecuaciones diferenciales (demostrado más adelante) que asegura que existe una solución única . Fin de la demostración.
El resultado es muy intuitivo. Puedes conducir desde hasta a lo largo de la curva trazada por simplemente manteniendo la velocidad . Esto te da tu nueva parametrización. Tu nuevo intervalo de tiempo será donde es la longitud de arco (la longitud de tu viaje). Llegaremos al cálculo de la longitud de arco en la próxima lección.
7.2.10 Observación adicional: Complejidades de las curvas continuas
Las curvas continuas pueden ser complicadas: si observas la partícula de polen en un microscopio, se mueve de manera errática sobre una curva que no es diferenciable en ningún punto, ya que es constantemente bombardeada por moléculas de aire que la hacen rebotar. Esto es el movimiento browniano. También existen las curvas de Peano o curvas de Hilbert o las curvas de Hilbert que llenan el espacio que cubren todos los puntos del cubo . Estas curvas definen una biyección continua de a . (La inversa no es continua. Aun así, la construcción muestra que hay la misma cantidad de puntos en que en ).
7.3 EJEMPLOS
Ejemplo 1. Suponiendo las ecuaciones de Newton m r^{\prime \prime}(t)=F(t), encuentra la trayectoria de un cuerpo de masa sujeto a una fuerza con y r^{\prime}(0)=[1,2,7].
Solución: tenemos r^{\prime \prime}(t)=[2 \sin (t), 2 \cos (t),-20]. La integración da r^{\prime}(t)=[-2 \cos (t), 2 \sin (t),-20 t]+\left[c_{1}, c_{2}, c_{3}\right]. Fijando las constantes se obtiene r^{\prime}(t)=[3-2 \cos (t), 2+2 \sin (t), 7-20 t]. Una segunda integración da con otras constantes . Comparando da
Ejemplo 2. Sea . Entonces r^{\prime}(t)=[-L \sin (t), L \cos (t), 0] \quad \text{y} \quad r^{\prime \prime}(t)= [-L \cos (t),-L \cos (t), 0] y r^{\prime}(t) \times r^{\prime \prime}(t)=\left[0,0, L^{2}\right] \quad \text{y} \quad \left|r^{\prime}(t)\right|=L. De modo que |r^{\prime}(t) \times r^{\prime \prime}(t)|/| r^{\prime}(t)|^{3}=1 / L. ¡Un círculo de radio tiene curvatura !
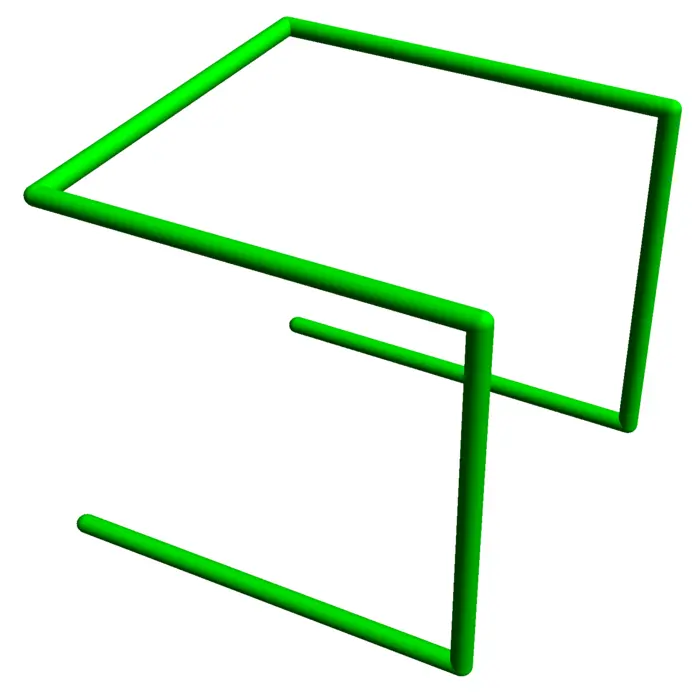
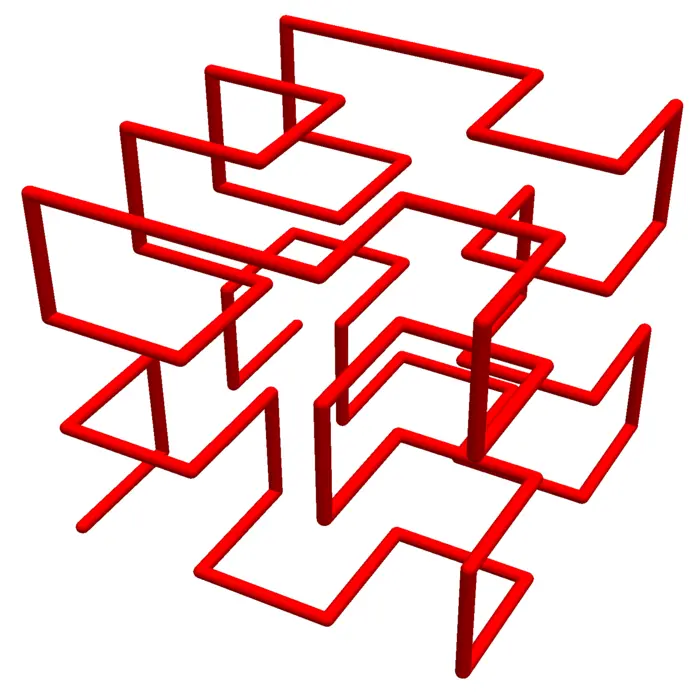
Ejemplo 3. Una curva simple cerrada en es un nudo. Para cualquier entero positivo , podemos considerar el nudo tórico La curvatura total de un nudo se define como . Ver Figura (7.3).3
EJERCICIOS
Ejercicio 1. Te sientas en un banco en cerca del Charles helado, situado entre Winthrop y Elliot, y lanzas piedras apuntando a , un punto cerca de la escuela de negocios de Harvard. Para no meternos en problemas, suponemos que todo ocurre en nuestra imaginación y que la piedra no tiene fricción. Utilizas una resortera y la lanzas con una velocidad inicial r^{\prime}(0)=[0,-24,61], supones que la aceleración gravitacional es r^{\prime \prime}(t)=[0,0,-10] en todo momento y usas metros para la distancia y segundos para el tiempo. ¿En qué punto alcanza la piedra la marca de metros de altura mientras desciende? [Opcional: te gusta un desafío y quieres rebotar en la superficie de hielo en y alcanzar el punto . ¿Qué velocidad inicial en logra esto?]
Ejercicio 2. Queremos producir un logotipo para una nueva empresa y experimentamos. Dibuja la curva y encuentra la velocidad, aceleración y curvatura en .
Ejercicio 3. Parametriza la curva que se obtiene al intersectar el cilindro con el plano .
Ejercicio 4. Verifica que el nudo tórico vive en el toro
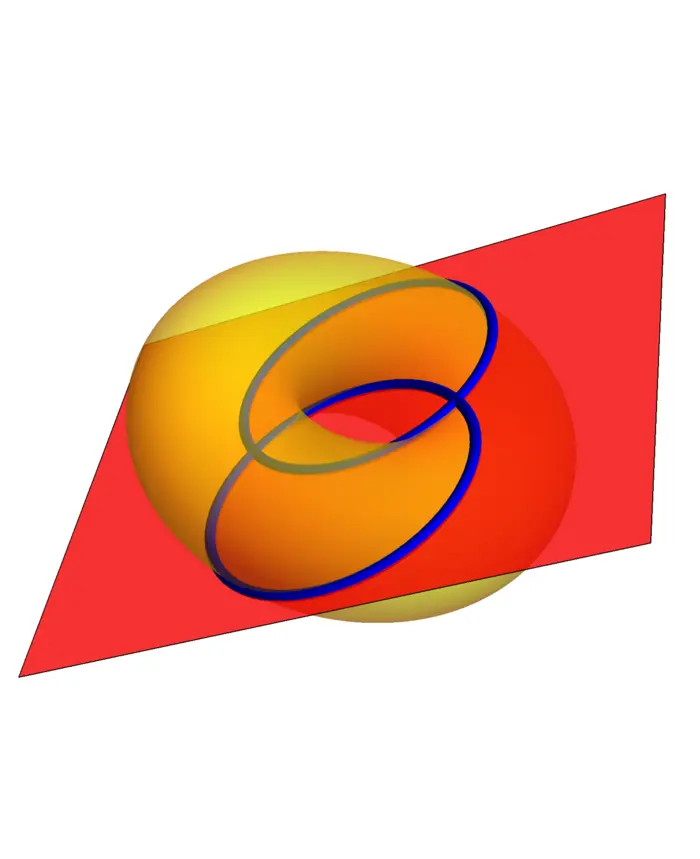
Ejercicio 5. Cortas un bagel de una manera no estándar. Supongamos que el bagel está dado por Verifica que si intersectamos este toro con el plano , entonces obtenemos los círculos de Villarceau así como también el círculo
