Table des matières
- 1.1 INTRODUCTION
- 1.2 COURS
- 1.2.1 Notions essentielles sur les matrices
- 1.2.2 Espace vectoriel des matrices
- 1.2.3 Espaces euclidiens, produit scalaire et longueur
- 1.2.4 Inégalité de Cauchy-Schwarz
- 1.2.5 Angle entre deux vecteurs
- 1.2.6 Loi des cosinus
- 1.2.7 Comprendre le théorème de Pythagore : un cas particulier de la loi des cosinus
- 1.3 EXEMPLES
- 1.4 ILLUSTRATION
- EXERCICES
1.1 INTRODUCTION
1.1.1 Exploration du théorème de Pythagore : son histoire et sa signification
Dans ce premier cours, nous examinons l'un des théorèmes les plus importants des mathématiques, le théorème de Pythagore. Les racines historiques du théorème sont fascinantes : les premiers exemples d'identités comme sont déjà apparus dans les mathématiques sumériennes. Les triplets de nombres comme sont appelés triplets pythagoriciens. Le théorème lui-même est bien plus que cela. Le théorème ne se contente pas de donner quelques exemples à titre de preuve, mais il énonce et prouve que pour tous les triangles, la relation est vraie si et seulement si le triangle est un triangle rectangle. Sans exagération, le théorème de Pythagore est l'un des théorèmes les plus beaux et les plus importants. Il apparaît dans divers autres domaines des mathématiques. En analyse harmonique par exemple, il dit que le carré de la longueur d'une fonction périodique est la somme des carrés de ses coefficients de Fourier. En théorie des probabilités, il dit que si deux variables aléatoires sont non corrélées, alors la variance de est la somme de la variance de et de la variance de .
1.1.2 Redéfinir les vecteurs
Nous utilisons ici également le théorème tout en introduisant les vecteurs et les espaces linéaires. Le langage des matrices n'est pas seulement une question de notation, mais permet également une approche légèrement plus sophistiquée du calcul vectoriel dans laquelle on distingue les vecteurs colonnes des vecteurs lignes. Contrairement aux cours d'analyse vectorielle standard, cela est possible lorsque l'on travaille plus près de l'algèbre linéaire. Traditionnellement, de nombreuses sources définissent un vecteur comme une quantité ayant une « grandeur » et une « direction ». Cela est très problématique car un « film » répond à cette notion : il a une durée et a un réalisateur. Mais nous n'avons pas besoin de nous moquer avec un jeu de mots : le vecteur nul est une quantité qui ne pourrait pas être qualifiée de vecteur car le vecteur nul n'a pas de direction. En raison de ces problèmes, on définit généralement un vecteur comme une quantité définie par deux points dans l'espace, on note et on pense au vecteur comme à une translation de à ou comme une « flèche » partant de et se terminant en . Or, on a la difficulté que deux vecteurs parallèles de même longueur sont identifiés. On utilise en fait des classes d'équivalence pour passer de l'espace affine à l'espace linéaire. Le point de vue moderne est que l'on peut attacher un espace linéaire de vecteurs en chaque point et considérer comme un vecteur attaché au point . Nous verrons par exemple le concept de champ de gradient, qui attache en chaque point un vecteur ligne. Les champs de forces en sont des exemples.
1.1.3 Fondements matriciels en analyse de données
En tout cas, introduire les espaces de matrices tôt présente des avantages également à une époque où l'analyse de données est reconnue comme un outil important. Les bases de données relationnelles sont fondées sur le concept de matrices. Les plus familières sont les feuilles de calcul qui sont des tableaux bidimensionnels dans lesquels les données sont organisées. Plus récemment, de tels concepts sont également supplantés par des structures de données plus sophistiquées comme les bases de données graphes. Néanmoins, un graphe peut aussi être décrit par des matrices. Étant donné deux nœuds du réseau, l'entrée de la matrice indique comment ils sont liés. Dans le cas le plus simple, on met un si les nœuds sont connectés et s'ils ne le sont pas. En tout cas, les données sont toujours des tableaux de quantités plus élémentaires. La structure de la mémoire d'un ordinateur est organisée comme un tableau. Comme l'a montré Alan Turing, tous les calculs que nous avons formalisés peuvent être effectués sur une bande unidimensionnelle avec des entrées et . Les dispositifs de stockage informatiques modernes sont essentiellement de telles bandes de Turing, mais organisés de manière plus sophistiquée, en utilisant des partitions ou des secteurs de la même manière que les matrices sont organisées en lignes et en colonnes.
1.2 COURS
1.2.1 Notions essentielles sur les matrices
Un tableau rectangulaire fini de nombres réels est appelé une matrice. S'il y a lignes et colonnes dans , on l'appelle une matrice . On désigne l'entrée de la -ème ligne et de la -ème colonne par . Une matrice est un vecteur colonne, une matrice est un vecteur ligne. Une matrice est appelée un scalaire. Étant donné une matrice et une matrice , la matrice est définie par On l'appelle le produit matriciel. La transposée d'une matrice est la matrice . La transposée d'un vecteur colonne est un vecteur ligne.
1.2.2 Espace vectoriel des matrices
On note l'ensemble des matrices . Il contient la matrice nulle avec . Dans le cas , c'est le vecteur nul. L'addition de deux matrices dans est définie par La multiplication scalaire est définie par si est un nombre réel. Ces opérations font de un espace vectoriel espace linéaire : l'addition est associative, commutative avec un unique inverse additif vérifiant Les multiplications sont distributives : et et
1.2.3 Espaces euclidiens, produit scalaire et longueur
L'espace est aussi appelé . C'est l'espace euclidien de dimension . L'espace vectoriel est le plan et est l'espace physique. Ces espaces nous sont chers car nous dessinons sur du papier et vivons dans l'espace. Le produit scalaire entre deux vecteurs colonnes est le produit matriciel Puisque le produit scalaire est un scalaire, le produit est aussi appelé produit scalaire. Dans le produit matriciel de deux matrices , l'entrée à la position est le produit scalaire de la -ème ligne de avec la -ème colonne de . Plus généralement, le produit scalaire entre deux matrices quelconques peut être défini par où la trace d'une matrice est la somme de ses entrées diagonales. Cela signifie On prend simplement le produit sur toutes les entrées de la matrice et on les additionne. Le produit scalaire est distributif et commutatif On peut l'utiliser pour définir la longueur d'un vecteur ou la longueur d'une matrice, en prenant la racine carrée positive. La somme des carrés est nulle exactement si toutes les composantes sont nulles. Le seul vecteur vérifiant est donc .
1.2.4 Inégalité de Cauchy-Schwarz
Un résultat clé important est l'inégalité de Cauchy-Schwarz.
Théorème 1.
Preuve. Si , il n'y a rien à prouver car les deux côtés sont nuls. Si , alors on peut diviser les deux côtés de l'équation par et ainsi obtenir . Définissons . Maintenant, \begin{aligned} 0 \leq(v-a w) \cdot(v-a w)&=|v|^{2}-2 a v \cdot w+a^{2}|w|^{2}\\ &=|v|^{2}-2 a^{2}+a^{2}\\ &=|v|^{2}-a^{2} \end{aligned} ce qui signifie ou . ◻
1.2.5 Angle entre deux vecteurs
Il découle de l'inégalité de Cauchy-Schwarz que pour deux vecteurs non nuls quelconques , le nombre est dans l'intervalle fermé : Il existe donc un unique angle tel que Si cet angle entre et est égal à , les deux vecteurs sont orthogonaux. Si ou les deux vecteurs sont dits parallèles. Il existe alors un nombre réel tel que . Le vecteur nul est considéré à la fois orthogonal et parallèle à tout autre vecteur.
1.2.6 Loi des cosinus
Deux vecteurs définissent un triangle (éventuellement dégénéré) dans l'espace euclidien . La formule ci-dessus définit un angle au point (qui pourrait être l'angle nul). Les longueurs des côtés du triangle vérifient la formule cos suivante. On l'appelle aussi l'identité d'Al-Kashi.
Corollaire 1.
Preuve. Nous utilisons les définitions ainsi que la propriété distributive (développer) : \begin{aligned} c^{2}&=|v-w|^{2}\\ &=(v-w) \cdot(v-w)\\ &=v \cdot v+w \cdot w-2 v \cdot w\\ &=a^{2}+b^{2}-2 a b \cos (\alpha) \end{aligned} ◻
1.2.7 Comprendre le théorème de Pythagore : un cas particulier de la loi des cosinus
Le cas est particulièrement important. C'est le théorème de Pythagore :
Théorème 2. Dans un triangle rectangle, on a .
1.3 EXEMPLES
Exemple 1. Le produit scalaire est On a et l'angle .
Exemple 2. Le produit scalaire de et est La longueur de est , la longueur de est . L'angle entre et est
Exemple 3. et sont perpendiculaires car L'angle entre eux est . La longueur de est . La longueur de est . La longueur de est . On confirme Notez que . La multiplication n'est pas commutative.
Exemple 4. Trouver les angles dans un triangle de longueurs et .
Réponse : Al-Kashi donne d'où De même d'où et d'où
1.4 ILLUSTRATION

1.4.1 Horizons infinis en mathématiques
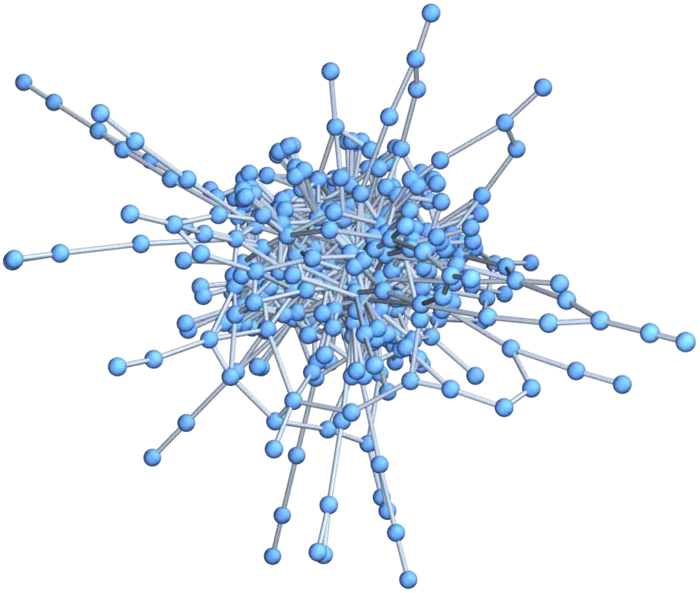
Les mathématiques ne sont pas seulement éternelles, mais aussi infinies. Pour illustrer cela, examinons le problème des "Éternels".1 Définissons le graphe babylonien dans lequel les entiers positifs sont les sommets et où sont connectés si est un carré parfait. Chaque arête de appartient à un triplet pythagoricien . On peut se demander quels types de sous-graphes apparaissent, combien de composantes connexes il y a, si le diamètre est infini, ou quelle taille peuvent atteindre les boucles fermées. Des centaines de questions pourraient être posées. Les triangles intégrés dans par exemple sont des briques d'Euler ! Existe-t-il des tétraèdres intégrés , des cliques de nombres pour lesquels chaque paire est un triplet pythagoricien ? Ce serait un tesseract eulérien. Y en a-t-il un ? Avant de prouver quoi que ce soit, nous avons un problème de données. Expérimentons !
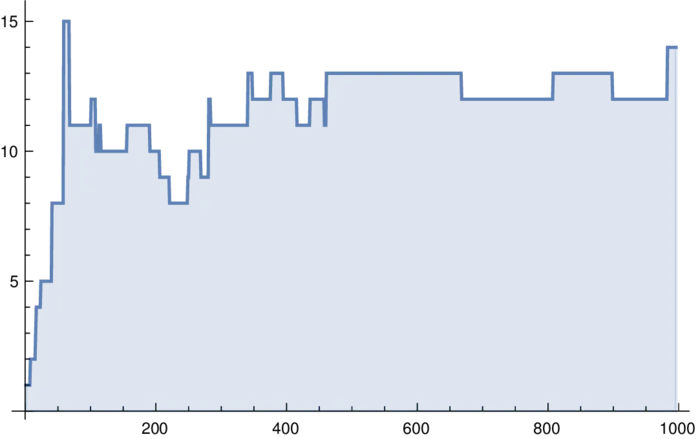
ListPlot[Table[GraphDiameter[Babylonian[n]],n,1000]] donne le diamètre de la plus grande composante de . Nous avons .EXERCICES
Exercice 1. Utilisez les définitions pour trouver l'angle entre le vecteur et dans . Si nous considérons comme des données, la valeur est la corrélation entre les deux points de données et . Si le cosinus est positif, les données ont une corrélation positive. S'il est négatif, elles ont une corrélation négative.
Exercice 2. Étant donnée la matrice .
- Trouvez , puis construisez et . La première matrice est dite symétrique, la seconde est dite antisymétrique.
- Calculez et . Évaluez ensuite et .
- Pourquoi ces deux nombres calculés en b) sont-ils identiques ? Est-ce vrai en général pour deux matrices que ? (Il y a une courte vérification utilisant la notation de somme).
Exercice 3.
- Vérifiez l'identité triangulaire en général en développant , puis générez un exemple de deux vecteurs avec des coordonnées entières dans le plan , où l'on peut appliquer cela. Dessinez la situation.
- Vérifiez que si et ont la même longueur, alors et sont perpendiculaires. Décrivez la situation en b) géométriquement en une phrase.
Exercice 4. Écrivez le vecteur comme la somme d'un vecteur parallèle à et d'un vecteur perpendiculaire à . Si nous interprétons comme une force agissant sur un cerf-volant de masse et comme la vitesse, alors a une interprétation comme puissance, le taux de variation de l'énergie du cerf-volant. Le vecteur parallèle à serait, selon Newton, l'accélération du cerf-volant.
Exercice 5.
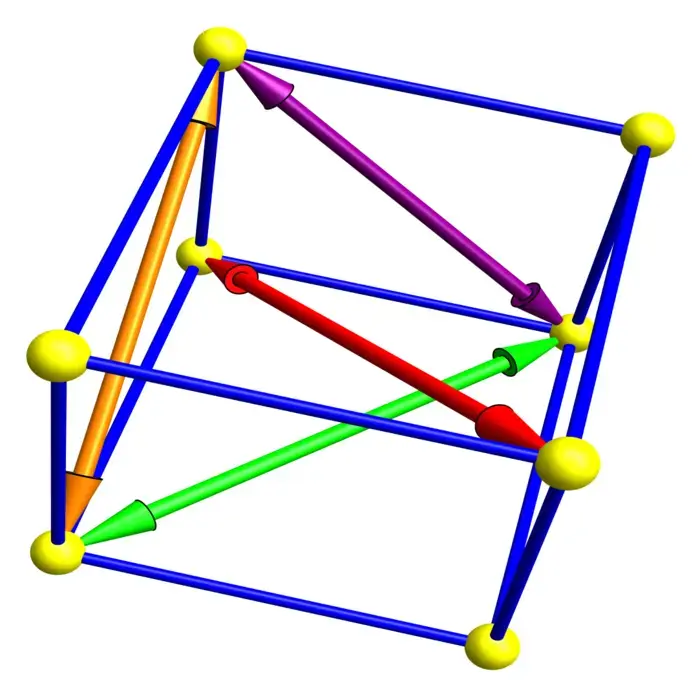
- Trouvez deux vecteurs dans dont toutes les coordonnées sont ou et qui sont tous deux perpendiculaires l'un à l'autre.
- Concevez quatre vecteurs dans dont toutes les coordonnées sont ou et qui sont tous perpendiculaires les uns aux autres.
Optionnel : pouvez-vous inventer une stratégie qui vous permette par exemple de trouver vecteurs dans qui sont tous perpendiculaires les uns aux autres et qui ont encore des entrées dans ?
- Ce problème nous a été communiqué par Ajak, qui connaît des milliers d'années de mathématiques↩︎