Table des matières
4.1 INTRODUCTION
4.1.1 Évolution de la multiplication vectorielle
Nous avons vu que l'on peut multiplier des matrices carrées et obtenir à nouveau une matrice. Ne serait-il pas agréable de pouvoir aussi multiplier deux vecteurs et obtenir un vecteur en retour. Le produit scalaire, qui est le produit matriciel d'un vecteur ligne par un vecteur colonne, nous donne un nombre. Le produit matriciel d'un vecteur colonne par un vecteur ligne nous donnerait une matrice carrée. Comment concevoir un produit de vecteurs colonnes qui redonne un vecteur colonne ? C'est la question que William Rowan Hamilton a méditée pendant de nombreuses années. L'histoire raconte que chaque matin, lorsqu'il descendait à la table du petit-déjeuner, son jeune fils lui demandait : « Papa, sais-tu déjà multiplier les triplets ? » ce à quoi William répondait : « Non, mon fils, je ne sais pas encore comment faire cela. »
4.1.2 Quaternions et produit vectoriel
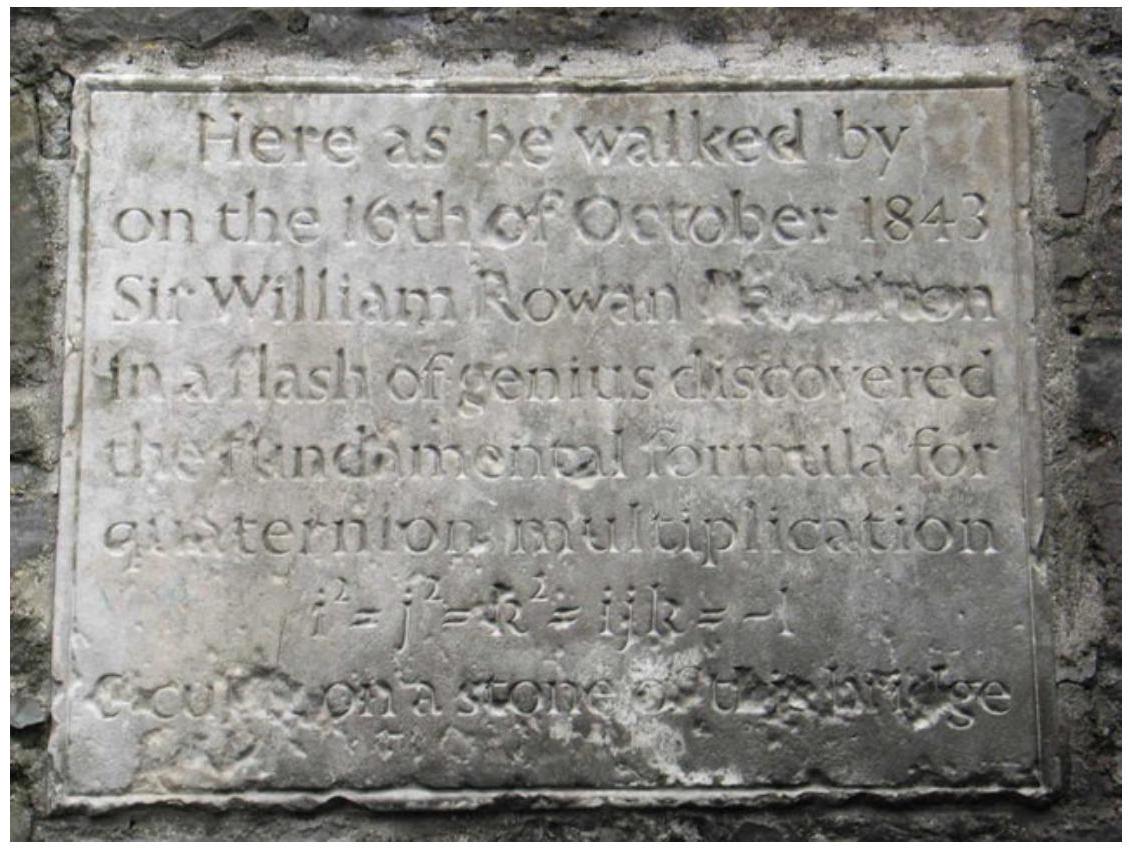
Finalement, Hamilton réussit. La légende raconte qu'en se promenant avec sa femme le long du Canal Royal à Dublin, en traversant le pont Brougham, il eut soudain l'inspiration : il faut multiplier des quadruplets ! Ces nombres s'écriraient où sont des symboles vérifiant . Il était si heureux qu'il consacrerait le reste de sa vie à ces nombres. Il s'avère maintenant que cette algèbre produit aussi un produit de vecteurs appelé le produit vectoriel. Il possède de nombreuses propriétés intéressantes, comme le fait que le produit de deux vecteurs est perpendiculaire et que sa longueur est liée à l'aire. Il a également des applications étonnantes en physique.
4.2 COURS
4.2.1 Unicité de
L'espace tridimensionnel est spécial. Il n'est pas seulement le seul espace euclidien dans lequel le problème de Kepler est stable1, il possède également un produit vectoriel qui est dans le même espace. Un tel produit peut être défini dans mais il produit un vecteur dans . Il se trouve que pour , le résultat est à nouveau dans . Le problème de la « multiplication des triplets » a été médité par William Hamilton dans la première moitié du 19e siècle et est lié à l'histoire fascinante des quaternions. La découverte des quaternions a été simultanément le lieu de naissance du produit scalaire et du produit vectoriel.
4.2.2 Propriétés du produit vectoriel
Le produit vectoriel de deux vecteurs et est
Prenez le produit scalaire avec ou pour voir que est perpendiculaire à la fois à et à . Il est également évident que . Le produit est pratique pour les constructions dans . Les vecteurs sont orientés comme les trois premiers doigts de la main droite : si est le pouce, l'index, alors est le majeur. Soit :
Théorème 1. et .
Preuve. Nous vérifierons en classe par force brute l'identité de Lagrange qui est aussi appelée formule de Cauchy-Binet. Utilisez maintenant pour obtenir le résultat avec . ◻
4.2.3 Applications géométriques du sinus
Étant donné un triangle de côtés et d'angles , où est opposé à etc. Nous avons la formule du suivante
Corollaire 1.
Preuve. Nous pouvons utiliser le théorème et exprimer l'aire du triangle comme ou ou . En égalant ces trois quantités et en divisant par le facteur commun, nous obtenons la formule du . ◻
4.2.4 Aperçus géométriques sur l'aire
Ceci est utile dans les applications pour définir l'aire du parallélogramme comme . Que cela soit justifié peut être vu en deux dimensions et :
Corollaire 2. est l'aire du parallélogramme engendré par et .
Preuve. Utilisez la formule et notez que est la hauteur du parallélogramme engendré par et . La longueur de la base est . ◻
4.2.5 Produit mixte
Le scalaire est appelé le produit mixte de . Son signe définit une orientation des trois vecteurs. C'est aussi le déterminant de la matrice La valeur absolue de définit le volume du parallélépipède engendré par , et . Sans la valeur absolue, on parle aussi de volume signé.
4.2.6 Remarque : Produit vectoriel en dimensions supérieures
En dimensions supérieures, le produit vectoriel est appelé produit extérieur. On utilise plutôt que qui est utilisé en trois dimensions. Si est un choix de deux éléments dans et sont deux vecteurs dans , alors . La formule reste valable et la preuve est la même. Nous devons seulement vérifier à nouveau la formule de Cauchy-Binet . Mais cela se fait mieux en utilisant des matrices. Si est la matrice qui contient comme colonnes, alors , où la somme à droite porte sur toutes les sous-matrices de . L'expression est appelée un mineur. La formule de Cauchy-Binet est super cool2. Au fait, si nous avons vecteurs et construisons , une matrice ayant ces vecteurs comme colonnes. Alors, est le volume du parallélépipède engendré par ces vecteurs. Et Cauchy-Binet écrit cela comme une somme de carrés de volumes -dimensionnels de projections, ce qui est en quelque sorte une généralisation de Pythagore.
4.3 EXEMPLES
Exemple 1. Quelle est l'aire du triangle , et ? Nous trouvons le produit vectoriel entre le vecteur allant de à et le vecteur allant de à . Le produit vectoriel est Sa longueur est . L'aire du triangle est la moitié : .
Exemple 2. Trouvez le volume du parallélépipède ayant pour sommets et les coins attachés , et . Le volume signé est et on prend la valeur absolue. Un nombre négatif indique que , , est orienté à gauche.
4.4 ILLUSTRATIONS

EXERCICES
Exercice 1. Trouvez un vecteur perpendiculaire aux vecteurs et . Utilisez ensuite ce résultat pour trouver un vecteur perpendiculaire à la fois à et .
Exercice 2. Un scanner 3D est utilisé pour construire un modèle 3D d'un visage. Il détecte un triangle dont les sommets sont , et . Trouvez l'aire de ce triangle ainsi qu'un vecteur perpendiculaire au triangle.3
Exercice 3. Trouvez le volume du parallélépipède qui a pour sommets , , , , , , , .
Exercice 4. Examinez lesquelles des formules suivantes sont toujours vraies pour tous les vecteurs . Si c'est vrai, expliquez, citez une source (par ex. sur le web), ou vérifiez à la main ou par calcul formel. Si ce n'est pas vrai, trouvez un contre-exemple.
Exercice 5. Étant donné deux vecteurs et , construisez les matrices \begin{aligned} P= \begin{bmatrix} 0 & a & b \\ -a & 0 & c \\ -b & -c & 0 \end{bmatrix}, \quad Q= \begin{bmatrix} 0 & u & v \\ -u & 0 & w \\ -v & -w & 0 \end{bmatrix}. \end{aligned} Comparez et . Décrivez ce que vous voyez. Essayez de formuler cela comme un théorème.
- par un théorème de Joseph Bertrand de 1873 et les travaux de Sundman-von Zeipel↩︎
- O. Knill, Cauchy Binet for pseudo-determinants, Lin. Alg. and its Applications 459 (2014) 522-547↩︎
- Le format STL utilisé pour l'impression 3D a une forme extrêmement simple. Il se compose d'entrées comme
facet normal 0.15-0.97-0.20
outer loop
vertex -1.6996-0.5597-2.8360
vertex -1.8259-0.5793-2.8374
vertex -1.7232-0.5399-2.9509
endloop
endfacet
La première ligne donne le vecteur normal, puis il y a une boucle avec trois sommets donnant le triangle. Il y a évidemment une certaine redondance car on pourrait obtenir le vecteur normal à partir des points en utilisant le produit vectoriel. Mais cela a un but : l'information redondante rend le travail avec la structure de données plus rapide, deuxièmement, on peut aussi examiner des situations où le vecteur normal n'est pas perpendiculaire à la surface, on peut changer la façon dont la surface est "ombrée", comme la façon dont la lumière est réfléchie à la surface. Troisièmement, la redondance est toujours bonne pour détecter les erreurs. Notre information génétique dans l'ADN est stockée de manière hautement redondante. Cela permet la correction d'erreurs.↩︎