Qu'est-ce que la mécanique des solides ?
La mécanique des solides est une branche de la mécanique des milieux continus, également appelée mécanique des milieux continus. Le mot « continu » reflète l'hypothèse selon laquelle la matière est considérée comme parfaitement continue, sans lacunes ni espaces entre ses constituants, en ignorant sa structure atomique. Il est clair que cette hypothèse ne tient plus si l'on zoome trop près. Le niveau de grossissement auquel cette hypothèse devient caduque dépend du problème ; mais il se situe souvent à l'échelle de quelques dizaines de nanomètres. Pourtant, il est parfois utile, voire nécessaire, de prendre en compte la structure atomique.
L'autre branche majeure de la mécanique des milieux continus est la mécanique des fluides. Un solide se distingue d'un fluide par sa capacité à supporter des forces de cisaillement importantes sur une échelle de temps donnée. Alors que tous les matériaux, fluides comme solides, peuvent supporter dans une certaine mesure des forces normales, c'est cette résistance aux forces de cisaillement qui caractérise des substances comme la roche, l'acier et le caoutchouc en tant que solides. Cependant, cette distinction n'est pas nette et dépend parfois de la durée d'observation. Par exemple, le manteau terrestre se comporte comme un solide lorsque les ondes sismiques le traversent rapidement, mais sur des millions d'années, il s'écoule comme un fluide. Le Silly Putty en est un autre exemple : il s'étale comme un liquide si on le laisse sur une table (voir la figure suivante), mais rebondit comme un solide lorsqu'on le lance contre un mur (voir la vidéo suivante). Cela montre que le caractère solide d'un matériau peut dépendre de la durée d'application de la force.1

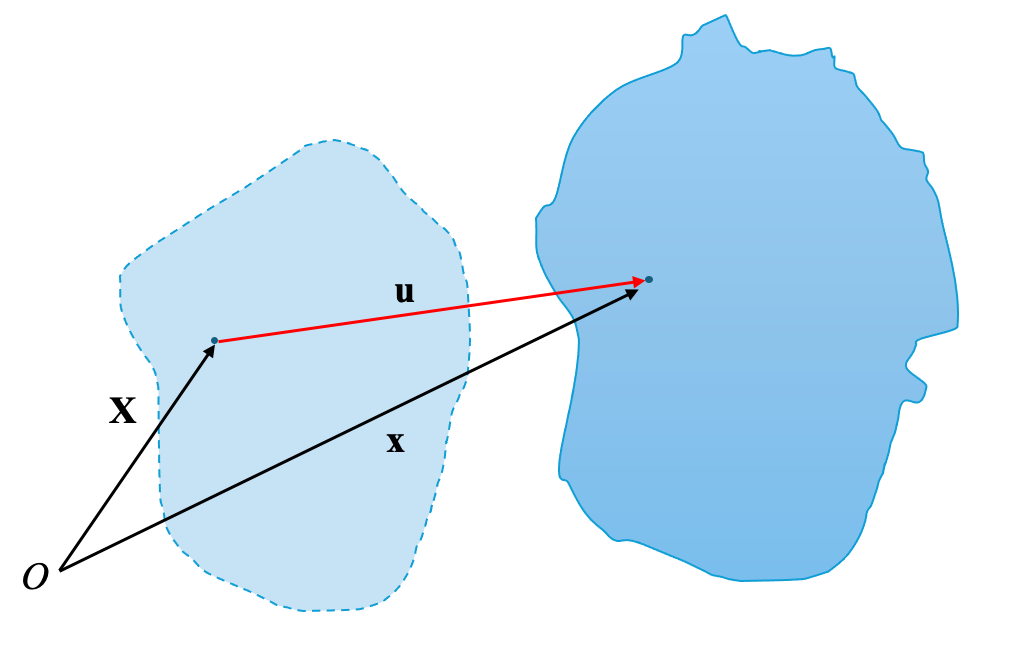
La mécanique est le domaine d'étude concernant la réponse des corps aux forces. Par conséquent, la question centrale en mécanique des solides est : comment un solide se déforme-t-il lorsqu'une charge est appliquée ? La charge peut être de tout type, mais nous nous concentrons principalement sur les charges mécaniques et, dans une certaine mesure, thermiques. Nous voulons déterminer de combien (et dans quelle direction) chaque particule2 se déplace lorsqu'une charge est appliquée. La fonction vectorielle qui attribue à chaque point d'un corps le déplacement qu'il subit lorsque le corps se déplace ou se déforme sous l'effet de charges appliquées est appelée le champ de déplacement3. Le gradient, ou dérivée spatiale, du champ de déplacement est appelé déformation.
Lorsque l'application de charges modifie la distance entre les atomes, ceux-ci s'écartent de leurs positions d'équilibre et des forces internes se développent. Comme nous l'avons expliqué précédemment, la mécanique des milieux continus adopte une perspective macroscopique ; au lieu d'analyser les forces atomiques individuelles, nous considérons leur effet collectif. Nous parlons d'une intensité de force moyenne — appelée contrainte — agissant sur un petit volume pouvant contenir des millions d'atomes. Ainsi, les trois champs avec lesquels nous travaillons souvent sont le déplacement, la déformation et la contrainte.
Si, après suppression des forces, le déplacement des particules revient à zéro — c'est-à-dire que les particules retournent à leur position d'origine — le matériau est dit élastique. Si la déformation est linéairement proportionnelle à la contrainte (ou de manière équivalente, le déplacement est linéairement proportionnel aux forces), le matériau est considéré comme élastique linéaire. Tous les matériaux élastiques ne sont pas élastiques linéaires. Le caoutchouc est un exemple de matériau élastique non linéaire. Si un déplacement résiduel subsiste après la suppression des forces, la déformation restante est appelée déformation plastique.
L'étude de la relation entre les forces internes et le déplacement (ou de manière équivalente entre la contrainte et la déformation) est un autre sujet central en mécanique des solides. Cette relation varie d'un matériau à l'autre et est souvent fonction de la température et, dans certains cas, de la vitesse de chargement. L'étude de cette relation requiert une certaine connaissance en science des matériaux et en structures atomiques.
La réponse d'un matériau peut dépendre du temps. Si la charge reste constante, le déplacement peut augmenter très progressivement. Ce phénomène est appelé fluage. Par exemple, une nouvelle étagère peut être parfaitement droite, mais on peut observer qu'elle s'affaisse après avoir supporté le poids des livres pendant une longue période. En général, le fluage est plus prononcé à des températures plus élevées.
Dans certains matériaux, la contrainte peut diminuer au fil du temps même si le déplacement est maintenu constant. Ce phénomène est appelé relaxation de contrainte.

Un matériau peut se briser en deux ou plusieurs morceaux distincts sous l'effet d'une contrainte appliquée. C'est ce qu'étudie une branche de la mécanique des solides appelée mécanique de la rupture.
La mécanique des solides n'est pas un domaine que l'on peut étudier en vase clos. Une véritable compréhension nécessite souvent des connaissances en thermodynamique, en science des matériaux, voire en mécanique quantique. Par exemple, les théories classiques de la mécanique des solides atteignent leurs limites lorsque la microstructure interne d'un métal commence à dominer son comportement. C'est le cas, par exemple, lorsque la structure d'un métal évolue continuellement à haute température, ou lorsqu'il subit une transition ductile-fragile. À ces moments-là, on observe une intersection claire où les principes de la mécanique et de la science des matériaux doivent collaborer.
Au-delà des bases : en quoi ce livre est différent
La mécanique des solides élémentaire, également connue sous le nom de mécanique des matériaux ou mécanique des corps déformables, est une matière que les étudiants suivent généralement en premier cycle universitaire. Bien qu'elle introduise les concepts de contrainte et de déformation, le matériau est presque toujours supposé élastique linéaire. De plus, seuls des cas très simples, comme la flexion d'une poutre ou la torsion d'une barre circulaire (arbre), sont considérés. Cela laisse en suspens des questions importantes, telles que la manière de calculer les champs de contrainte et de déformation lorsque des forces arbitraires sont appliquées à un corps de forme quelconque. Une autre simplification souvent faite en mécanique des matériaux élémentaire est l'hypothèse que le matériau est isotrope, c'est-à-dire que ses propriétés sont identiques dans toutes les directions. Un exemple courant de matériau anisotrope est le bois, qui présente une résistance différente le long de ses fibres par rapport à la direction perpendiculaire à celles-ci. Enfin, nous étudierons également le comportement dépendant du temps des matériaux.
Dans ce livre, nous commençons par l'analyse de la contrainte et de la déformation, et nous étudions la relation contrainte-déformation. Nous dérivons les équations de l'élasticité et apprenons comment résoudre certains problèmes d'élasticité de manière analytique et plus généralement numérique. Nous abordons les critères de plasticité et la déformation plastique. Enfin, nous étudions des éléments de mécanique de la rupture et le comportement dépendant du temps.
Études complémentaires
- James R. Rice. « Mechanics of Solids. » Encyclopædia Britannica. Consulté le 2 septembre 2025. https://www.britannica.com/science/mechanics-of-solids.
- Dieter, George E. Mechanical Metallurgy. 1st ed. New York : McGraw-Hill, 1961.
- Poirier, Jean-Paul. Creep of Crystals. Cambridge University Press, 1985.
- Référence https://www.britannica.com/science/mechanics-of-solids par James Rice.↩︎
- En mécanique des milieux continus, lorsque nous parlons de particule, nous entendons un point mathématique dans l'espace.↩︎
- En physique et en mathématiques, un champ est une grandeur physique qui a une valeur pour chaque point de l'espace et du temps. Les champs sont classés selon le type de grandeur qu'ils représentent en chaque point. Un champ scalaire attribue une valeur numérique unique, ou scalaire (comme la température), à chaque point de l'espace. Un champ vectoriel attribue un vecteur — une grandeur ayant à la fois une magnitude et une direction (comme la vitesse ou le déplacement) — à chaque point. Des grandeurs plus complexes appelées tenseurs peuvent également être représentées par des champs. Un champ tensoriel associe un tenseur à chaque point de l'espace et du temps. La contrainte et la déformation sont deux exemples courants de champs tensoriels fondamentaux en mécanique des solides.↩︎