Table des matières
- 10.1 INTRODUCTION
- 10.2 COURS
- 10.2.1 Du cartésien au polaire : une transformation de coordonnées
- 10.2.2 Nombres complexes : un cadre multiplicatif
- 10.2.3 Séries de Taylor
- 10.2.4 La beauté de la formule d’Euler
- 10.2.5 Logarithmes complexes et les perspectives d’Euler
- 10.2.6 Coordonnées cylindriques
- 10.2.7 Coordonnées sphériques
- 10.2.8 Changements de coordonnées et dérivées partielles
- 10.2.9 La matrice jacobienne pour les coordonnées polaires
- 10.2.10 L’algèbre des transformations complexes
- 10.2.11 Transformations spatiales et le jacobien
- 10.2.12 Distorsion du volume en coordonnées sphériques
- 10.3 EXEMPLES
- 10.4 ILLUSTRATIONS
- EXERCICES
10.1 INTRODUCTION
10.1.1 Fondements algébriques des systèmes de coordonnées
L’algèbre est un outil puissant en géométrie. Dans ce cours, nous revenons au concept de coordonnées et examinons également d’autres systèmes de coordonnées. Nous avons introduit l’espace sous forme de vecteurs colonnes comme . Nous pouvons le considérer comme une flèche allant de l’origine au point . On parle des nombres apparaissant dans comme des coordonnées, tandis que les entrées dans sont les composantes du vecteur. La plupart du temps, nous ne distinguons pas entre le point et le vecteur car les deux objets peuvent clairement être identifiés naturellement. Nous examinons dans ce cours également d’autres coordonnées comme les coordonnées polaires et sphériques. Cela sera important lors de l’intégration.
10.2 COURS
10.2.1 Du cartésien au polaire : une transformation de coordonnées
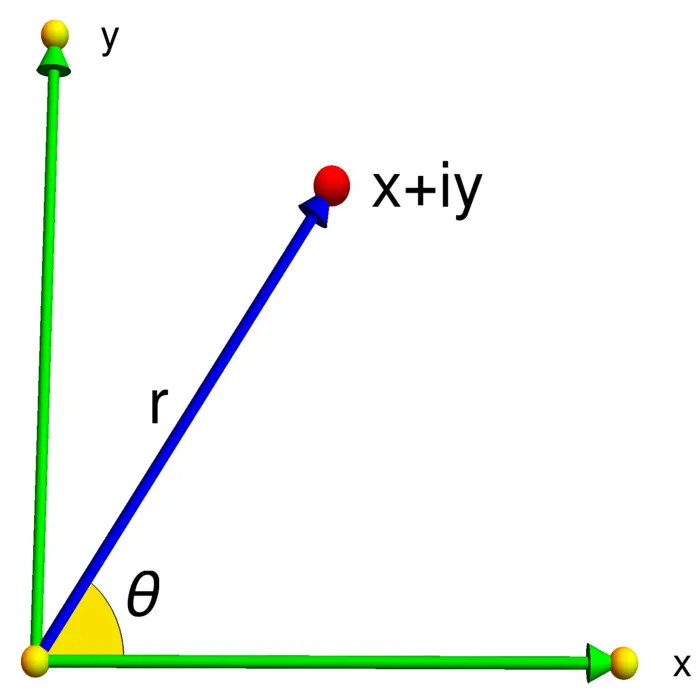
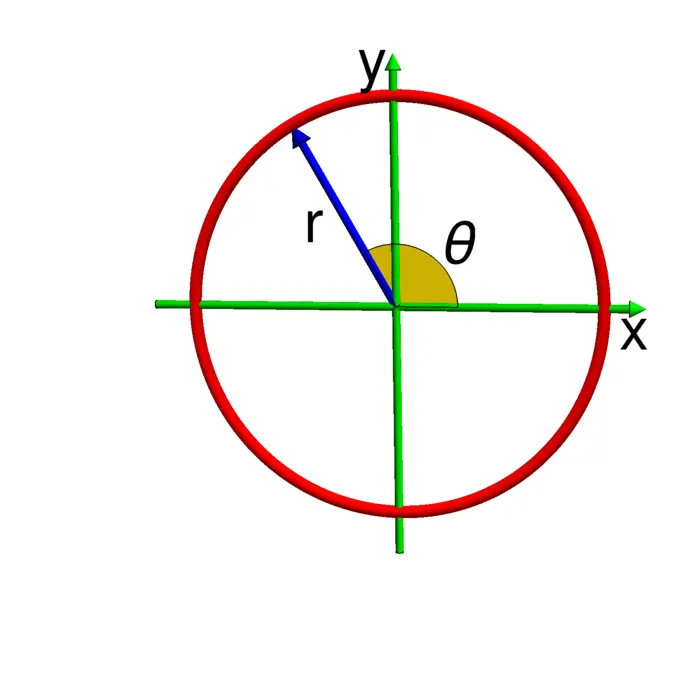
C’est René Descartes qui, en 1637, a introduit les coordonnées et a rapproché l’algèbre de la géométrie.1 Les coordonnées cartésiennes dans peuvent être remplacées par d’autres systèmes de coordonnées comme les coordonnées polaires , où est la distance radiale à l’origine et est l’angle polaire formé avec l’axe positif des . Puisque se trouve dans l’intervalle , il est mieux décrit par la notation complexe . Le rayon est la longueur du nombre complexe. La conversion des coordonnées vers les coordonnées est \begin{aligned} x&=r \cos (\theta),\\ y&=r \sin (\theta). \end{aligned} Le rayon est , où, s’il est non nul, on prend toujours la racine positive. La formule de l’angle n’est valable que si et sont tous deux positifs. L’angle n’est pas défini de manière unique à l’origine , la plupart des logiciels supposent simplement .
10.2.2 Nombres complexes : un cadre multiplicatif
Nous pouvons également écrire un vecteur dans sous la forme d’un nombre complexe avec le symbole . Ce n’est pas seulement une commodité notationnelle. Les nombres complexes peuvent être additionnés et multipliés comme les autres nombres et bien que , ce dernier possède une structure multiplicative. Pour fixer cette structure, il suffit de spécifier que . Cela donne Nous avons aussi Une formule d’Euler importante relie les fonctions exponentielle et trigonométriques :
Théorème 1. .
Preuve. La preuve consiste à écrire la définition en série des deux côtés. Rappelons d’abord les définitions de Si nous remplaçons par , nous obtenons Mais ceci est ce qui est . ◻
10.2.3 Séries de Taylor
Si vous préférez ne pas voir les fonctions , , être définies comme des séries, vous pouvez les voir comme des séries de Taylor f(x)=f(0)+f^{\prime}(0) x+f^{\prime \prime}(0) / 2 ! x^{2}+\cdots=\sum_{k=0}^{\infty}\left(f^{(k)}(0) / k !\right) x^{k}. En dérivant les fonctions en , on voit alors la connexion.
10.2.4 La beauté de la formule d’Euler
La formule d’Euler implique pour la formule magique
Théorème 2. .
Cette formule est souvent élue comme la « plus belle formule des mathématiques ».2 Elle combine l’« analyse » sous la forme , la « géométrie » sous la forme de , l’« algèbre » sous la forme de , l’élément neutre additif et l’élément neutre multiplicatif .
10.2.5 Logarithmes complexes et les perspectives d’Euler
La formule d’Euler permet d’écrire tout nombre complexe sous la forme . Étant donné un autre nombre complexe , on a , ce qui montre que les angles polaires s’additionnent et que les rayons se multiplient. La formule d’Euler permet également de définir le logarithme de tout nombre complexe comme On voit maintenant que passer de à est une transformation très naturelle de vers . La fonction exponentielle est une application de . Elle transforme la structure additive de en la structure multiplicative car .
10.2.6 Coordonnées cylindriques
En trois dimensions, on peut considérer les coordonnées cylindriques qui sont simplement les coordonnées polaires dans les deux premières coordonnées. Un cylindre de rayon par exemple est donné par . Le tore peut s’écrire ou plus intuitivement , un cercle dans le plan .
10.2.7 Coordonnées sphériques
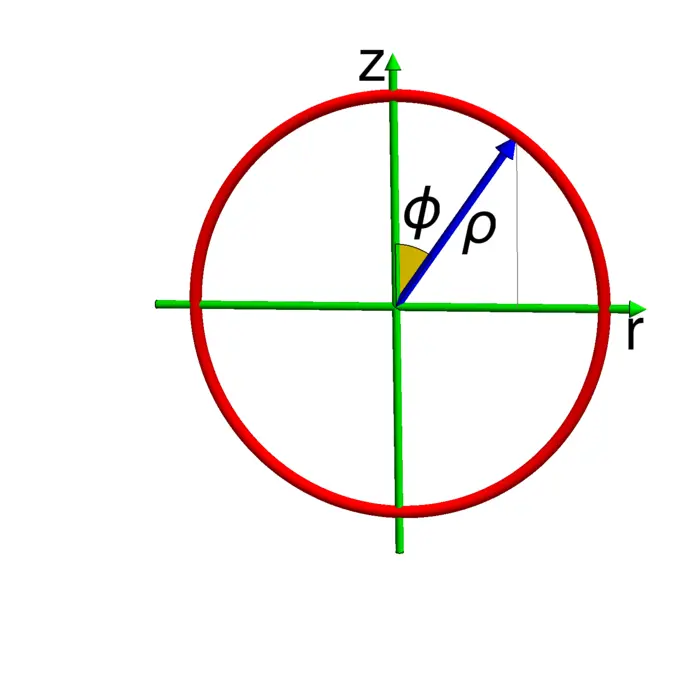
Les coordonnées sphériques , où . L’angle est l’angle polaire comme dans les coordonnées cylindriques et est l’angle entre le point et l’axe des . On a \begin{aligned} \cos (\phi)&=[x, y, z] \cdot[0,0,1] /\big|[x, y, z]\big|=z / \rho,\\ \sin (\phi)&=\big|[x, y, z] \times[0,0,1]\big| /\big|[x, y, z]\big|=r / \rho \end{aligned} de sorte que et et donc \begin{aligned} & x=\rho \sin (\phi) \cos (\theta) \\ & y=\rho \sin (\phi) \sin (\theta) \\ & z=\rho \cos (\phi) \end{aligned} où , , et .
10.2.8 Changements de coordonnées et dérivées partielles
Un changement de coordonnées dans le plan est une application . Un point est envoyé sur . On note la dérivée partielle par rapport à la variable . Par exemple .
où est une matrice appelée la matrice jacobienne. Le déterminant est appelé le facteur de distorsion en .
10.2.9 La matrice jacobienne pour les coordonnées polaires
Pour les coordonnées polaires, on obtient
Son facteur de distorsion de l’application polaire est . Nous l’utiliserons lors de l’intégration en coordonnées polaires.
10.2.10 L’algèbre des transformations complexes
Si avec s’écrit alors est une matrice de rotation-dilatation qui correspond au nombre complexe f^{\prime}(z)=2 z. L’algèbre est la même que l’algèbre des matrices de rotation-dilatation.
10.2.11 Transformations spatiales et le jacobien
Un changement de coordonnées dans l’espace est une application . On calcule
Nous avons noté . Son déterminant est un facteur de distorsion du volume.
10.2.12 Distorsion du volume en coordonnées sphériques
Pour les coordonnées sphériques, on a \begin{aligned} f\left[\begin{array}{l}\rho \\ \phi \\ \theta\end{array}\right]&=\left[\begin{array}{c}\rho \sin (\phi) \cos (\theta) \\ \rho \sin (\phi) \sin (\theta) \\ \rho \cos (\phi)\end{array}\right],\\ d f\left[\begin{array}{l}\rho \\ \phi \\ \theta\end{array}\right]&=\left[\begin{array}{rrr}\sin (\phi) \cos (\theta) & \rho \cos (\phi) \cos (\theta) & -\rho \cos (\phi) \sin (\theta) \\ \sin (\phi) \sin (\theta) & \rho \cos (\phi) \sin (\theta) & \rho \cos (\phi) \cos (\theta) \\ \cos (\phi) & -\rho \sin (\phi) & 0\end{array}\right]. \end{aligned} Le facteur de distorsion est .
10.3 EXEMPLES
10.4 ILLUSTRATIONS
10.4.1 La complexité de Mandelbrot
10.4.2 De Mandelbrot à Mandelbulb
EXERCICES
Exemple 1. Le point correspond au nombre complexe . Il a les coordonnées polaires . Comme nous avons , nous vérifions ce qui est en accord avec
Exemple 2.
- correspond aux coordonnées sphériques .
- Le point donné en coordonnées sphériques par est le point .
Exemple 3.
- L'ensemble des points avec dans forme un cercle.
- L'ensemble des points avec dans forme une sphère.
- L'ensemble des points avec les coordonnées sphériques sont les points sur l'axe positif.
- L'ensemble des points avec les coordonnées sphériques forme un demi-plan dans le plan .
- L'ensemble des points avec forme une sphère. En effet, en multipliant les deux côtés par , on obtient ce qui signifie , ce qui est, après complétion du carré, égal à .
Exemple 4. Pour , a et le facteur de .
Exemple 5. Trouver la matrice jacobienne et le facteur de distorsion de l'application Réponse : Écrire à la fois la transformation et la jacobienne : La matrice jacobienne est .
10.4 ILLUSTRATIONS
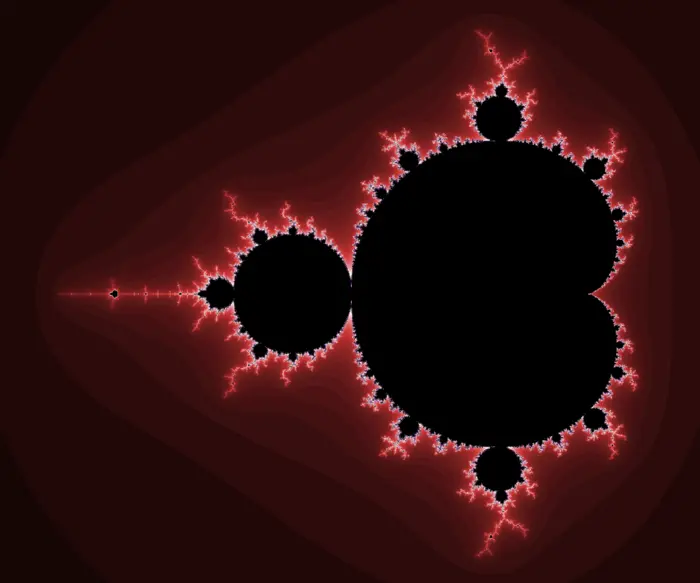
10.4.1 La complexité de Mandelbrot
Soit définie par , où . L'ensemble de tous les pour lesquels les itérés restent bornés est l'ensemble de Mandelbrot . Pour on obtient , de sorte que est soit soit . Le point est dans . Le point donne , , . Une récurrence montre que ne converge pas. Le point n'est pas dans .
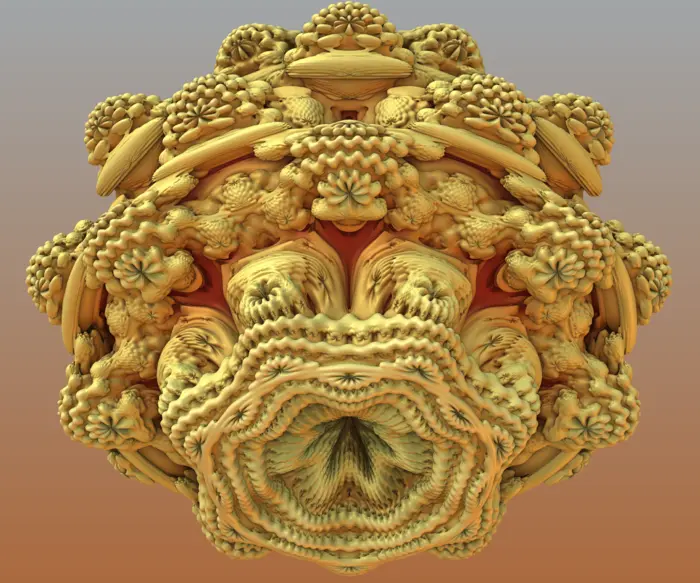
10.4.2 De Mandelbrot à Mandelbulb
Si est la transformation dans qui est en coordonnées sphériques donnée par , où a les coordonnées sphériques si a . Il s'avère que donne un bel analogue de l'ensemble de Mandelbrot, le Mandelbulb.
EXERCICES
Exercice 1.
- Trouver les coordonnées polaires de .
- Quel point a les coordonnées polaires ?
- Trouver les coordonnées sphériques du point .
- Quel point a les coordonnées sphériques ?
Exercice 2.
- Calculer pour pour , , . Est-ce que est dans l'ensemble de Mandelbrot ?
- Quel est le nombre « œil pour œil » ? (Vous pouvez utiliser ).
Exercice 3.
- Quelle surface est décrite par ?
- Décrire l'hyperbole en coordonnées polaires.
- Quelle surface est décrite par ?
- Décrire l'hyperboloïde en coordonnées sphériques.
Exercice 4.
- Calculer la matrice jacobienne et le facteur de distorsion du changement de coordonnées (application de Chirikov).
- Calculer la matrice jacobienne et le facteur de distorsion du changement de coordonnées (application de Hénon classique).
P.S. Lorsque vous effectuez le changement de coordonnées de l'application de Chirikov encore et encore, on peut observer le chaos. Dans le cas de l'application de Hénon, on voit un attracteur étrange, un objet fractal qui, de manière similaire à la courbe de Koch rencontrée la semaine dernière, a une dimension supérieure à .
Exercice 5.
- Vérifier que l'ensemble de Mandelbrot est contenu dans l'ensemble . Pour rappel, cela signifie que vous devez montrer qu'alors s'échappe à l'infini.
- Optionnel : Utiliser le même argument pour voir que l'ensemble de Mandelbulb est contenu dans l'ensemble .