自由度
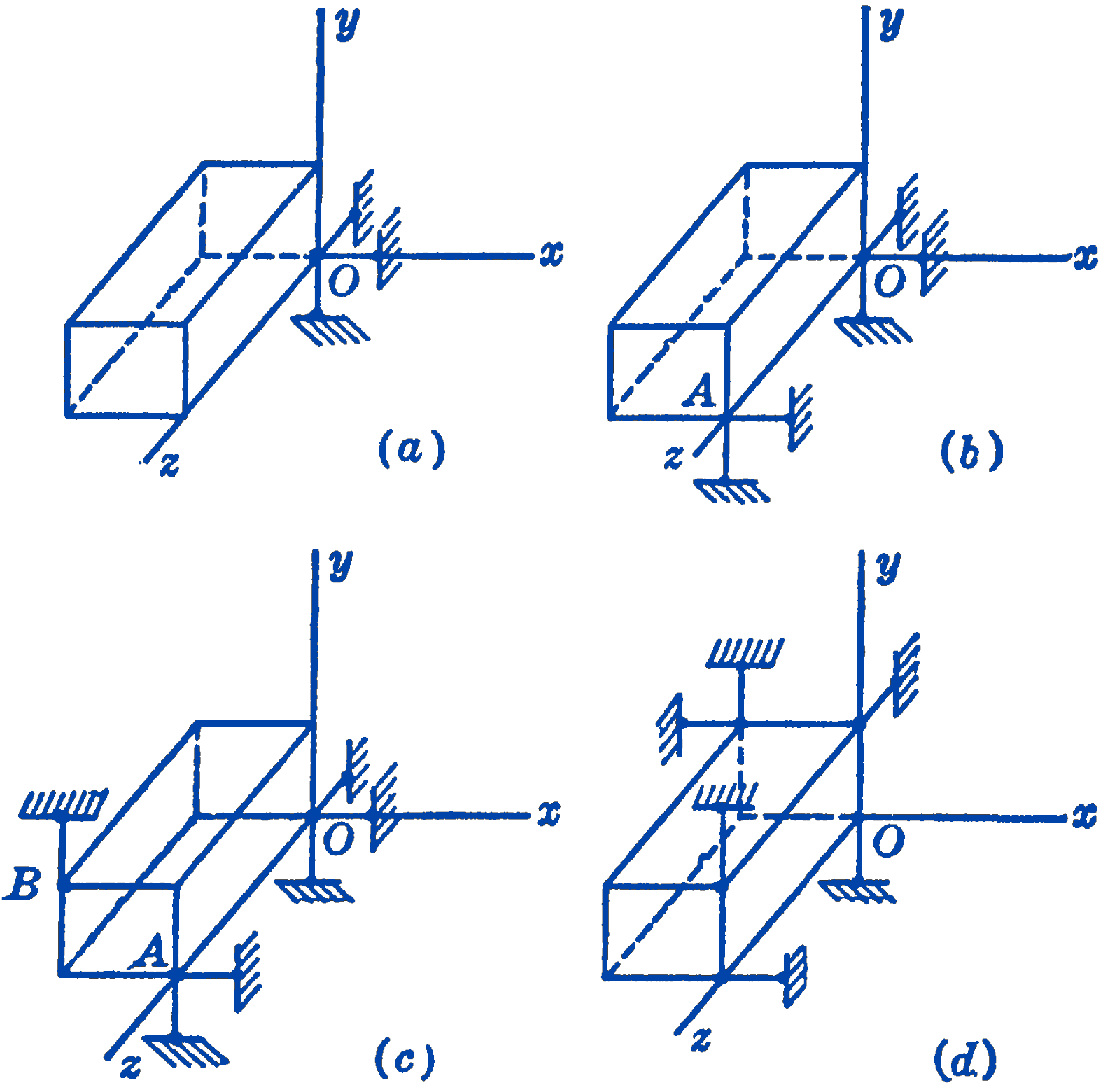
在仪器和机械设计中遇到的许多问题中,人们并不希望完全约束一个物体,而是希望允许某些类型的运动或自由度。系统的自由度数是指为了完全确定系统每个部分的位置而必须指定的独立坐标数。例如,一个只能沿一条直线运动的刚体将具有一个自由度,因为只需一个坐标(从某个任意点到该物体的距离)就足以确定该物体的位置。一个只能绕轴旋转的物体也将是一个单自由度系统,因为只需要旋转角就可以确定该物体所有部分的位置。参考章节:空间刚体的完全约束中的图 1a(在下方重复),可以看出,这个由三个约束支撑的系统具有三个自由度,因为例如,必须给出绕三个坐标轴的三个角度才能确定该物体的位置。在图 1b 中,增加两个约束将自由度数减少到一个,因为现在只能绕轴旋转。在所有情况下都会发现,系统的自由度数等于六减去约束数。这一原理在设计中非常有用,因为它指出了为了实现所需的运动类型,物体与其支撑结构之间所需的接触点数量。1
- Strong, J., Procedures in Experimental Physics, Prentice-Hall, Inc., New York, 1943, p. 585 .↩︎