为了理解如何在三维中将应力分量转换到新的坐标系中,我们首先回顾更简单的二维情况。我们将采用与之前不同的方法来处理二维变换,从向量的变换开始。
假设我们将坐标系旋转了一个角度 。将新坐标系称为 x'y'。我们想要了解如何从一个向量在新系统中的分量得到其分量。也就是说,如果向量 在旧系统中的分量为 和 ,在新系统中的分量为 和 (如下图所示),我们想要用 和 来表示 和 。
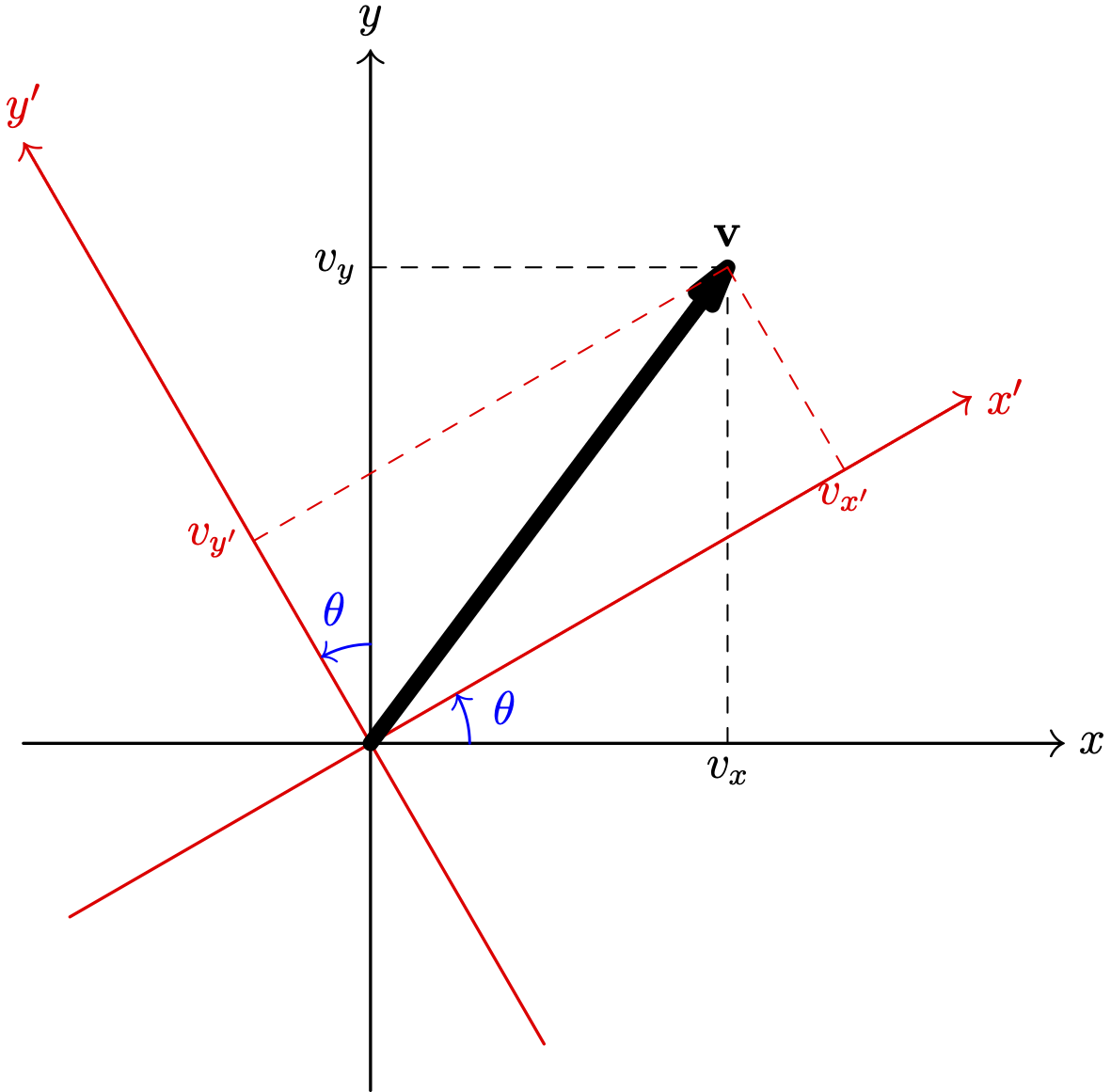
第一种方法
从几何关系(见下图)可以清楚地看出,我们可以写出
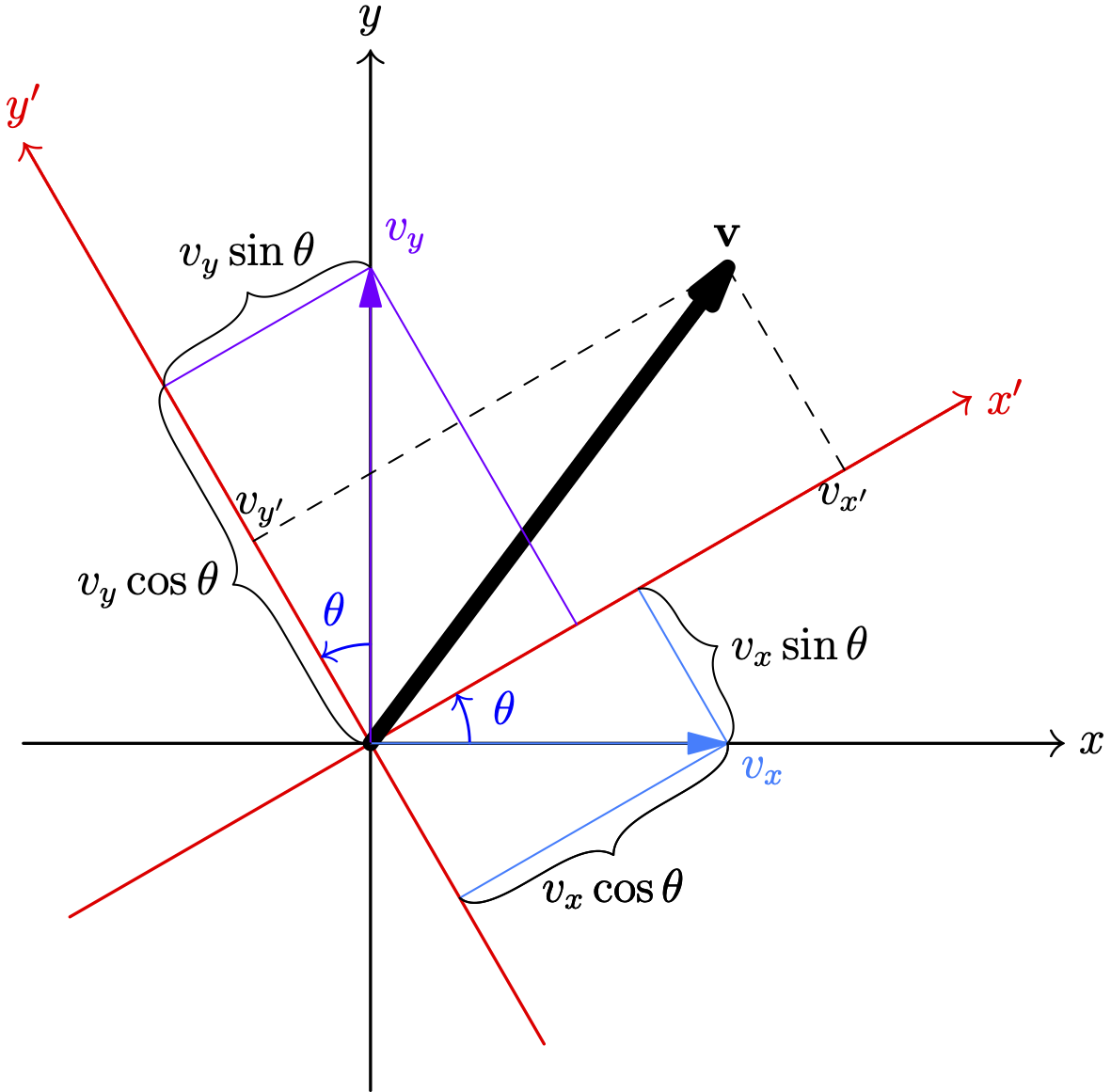
使用矩阵符号,上述方程可以写成
第二种方法
假设沿 x 轴和 y 轴的单位向量分别为 和 ,沿 x' 轴和 y' 轴的单位向量分别为 和 。设向量 在旧系统中的分量为 和 ,在新系统中的分量为 和 。因此,我们有 如果我们用 和 来表示 和 ,并将这些表达式代入 ,我们得到一个形式为 的表达式。由于向量在给定基下的分量是唯一的,我们必须有 和 。
这可以写成
我们可以将 写成
通过将上述方程与 进行比较,我们意识到必须有
如何确定 ?
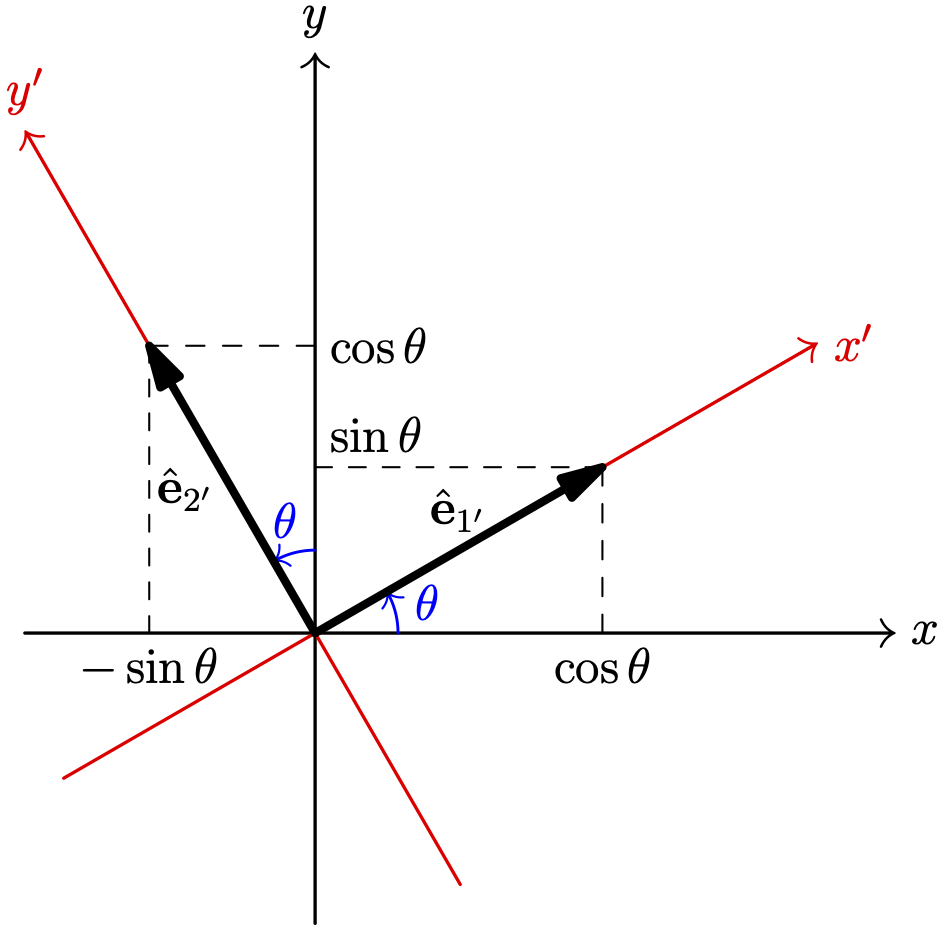
我们从 开始,求两边与 的点积 但是两个单位向量的点积等于它们之间夹角的余弦(这与 x 和 x' 之间夹角的余弦相同)。我们还注意到 是 在旧系统中的第一个分量 类似地,我们可以证明 也就是说 是 在旧坐标系中的第一个分量。类似地 因此, 也就是说,上述矩阵的列是旧坐标系中沿新坐标系的单位向量。
由于 且 ,矩阵 L 为 我们得到 和之前一样。
现在考虑一个更一般的情况。设沿新坐标系的单位法向量为 、 和 。让我们用新坐标系来表示旧的单位法向量: 你可能想知道 、……是什么。为了确定 ,让我们求 和 的标量积(也称为点积): 由于 相互垂直且每个的长度为 1,那么 因此, 因为 和 之间的夹角与 轴和 轴之间的夹角相同。我们还注意到 是 在旧系统中的第一个分量。
类似地, 这与 的第一个分量相同。
一般来说,我们有
现在我们想要写出向量 在新坐标系中的分量。设 、 和 是该向量在旧坐标系中的分量。因此, 如果我们将上述方程中的 替换为方程 (ix),我们得到: 如果在新的坐标系中, 的分量为 、 和 ,那么我们有 通过比较 (16) 和 (17),我们得到 或者简洁地, 我们可以将 (18) 写成以下矩阵形式: 或者
正交矩阵
矩阵 L 有一个特殊的性质:它的逆矩阵等于它的转置矩阵;即 这样的矩阵被称为正交矩阵,因为每一列(以及每一行)都构成了相互垂直的单位向量。
现在是时候研究如何用旧坐标系中的应力分量来表示新坐标系中的应力分量了。
回想一下,为了找到应力向量(或牵引向量),我们只需将应力张量 乘以所需平面的单位法向量 ();即, 现在,如果我们改变坐标系,我们刚刚学习了如何在新系统中表示牵引向量: 然而,当我们使用新坐标系时,单位法向量也将在这个系统中表示。也就是说,我们必须使用 而不是 。 然而, 将两边从右边乘以 L 的逆矩阵(由于 L 是正交矩阵,其逆矩阵等于其转置矩阵),我们得到 现在,如果我们将方程 (24) 中的 替换为 (25),我们得到 上述方程表明 等同于新坐标系中的应力,因为如果我们将新系统中任何所需平面的单位法向量乘以它,就会得到新系统中的牵引向量。因此, 其中 L 是一个矩阵,其列是旧坐标系中单位向量的分量。
现在让我们看看 x 轴和 y 轴旋转角度 的二维问题的公式。在这种情况下: 因此, 并且
从上述方程可以得出 这些与我们之前得到的方程相同。
附录:向量在正交基下的展开
假设 是相互垂直的单位向量。
任何 中的向量都可以表示为: 为了求出 ,取与 的点积: 由于基是标准正交的: 类似地: