Measurement of Surface Strain
Extensômetro de Resistência1
Exceto em alguns poucos casos envolvendo tensões de contato, não é possível medir tensões diretamente. Portanto, medições experimentais de tensão são na verdade baseadas em deformações medidas e são convertidas em tensões por meio da lei de Hooke e das relações mais gerais apresentadas no próximo capítulo. O dispositivo de medição de deformação mais universal é o extensômetro de resistência de fio colado, frequentemente chamado de extensômetro SR-4. Esses extensômetros são compostos por várias voltas de fio fino ou folha de composição especial, que são coladas na superfície do corpo a ser estudado. Se o adesivo for consideravelmente mais forte que o próprio extensômetro, ele efetivamente se torna parte integrante do corpo. Como resultado, quando o corpo é submetido a uma deformação ao longo da direção do extensômetro, o fio dentro do extensômetro e o corpo sofrerão a mesma deformação, e sua resistência elétrica é alterada. A variação da resistência, que é proporcional à deformação, pode ser determinada com precisão com um simples circuito de ponte de Wheatstone. A alta sensibilidade, estabilidade, robustez comparativa e facilidade de aplicação fazem dos extensômetros de resistência uma ferramenta muito poderosa para determinação de deformações.

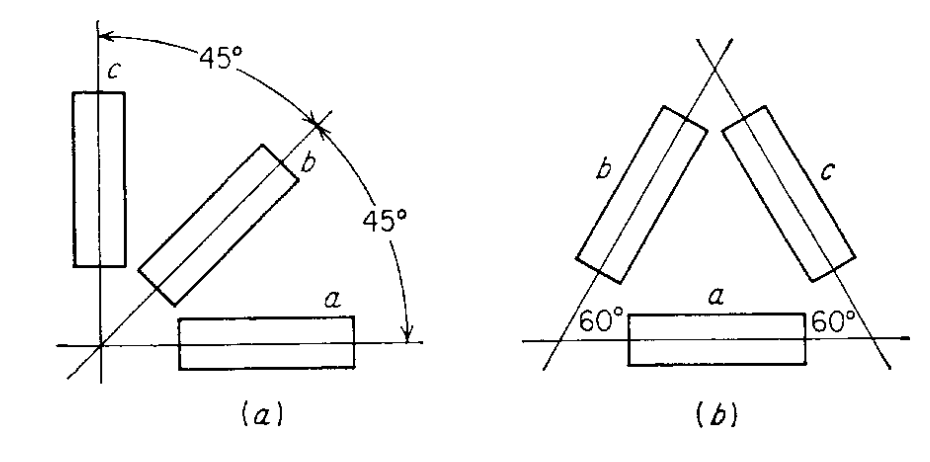
Para problemas práticos de análise experimental de tensões, muitas vezes é importante determinar as tensões principais. Se as direções principais forem conhecidas, os extensômetros podem ser orientados nessas direções e as tensões principais determinadas com bastante facilidade. No caso geral, a direção das deformações principais não será conhecida, de modo que será necessário determinar a orientação e a magnitude das deformações principais a partir das deformações medidas em direções arbitrárias. Como nenhuma tensão pode atuar perpendicularmente a uma superfície livre, as medições com extensômetros envolvem um estado bidimensional de deformação. O estado de deformação é completamente determinado se ϵxx, ϵyy e γxy puderem ser medidos. No entanto, extensômetros só podem fazer leituras diretas de deformação linear, enquanto as deformações de cisalhamento devem ser determinadas indiretamente. Portanto, é prática comum usar três extensômetros separados por ângulos fixos na forma de uma “roseta”, como na figura a seguir. As leituras dos extensômetros em três valores de θ fornecerão três equações simultâneas, que podem ser resolvidas para ϵxx, ϵyy e γxy. Então podemos determinar as deformações principais.
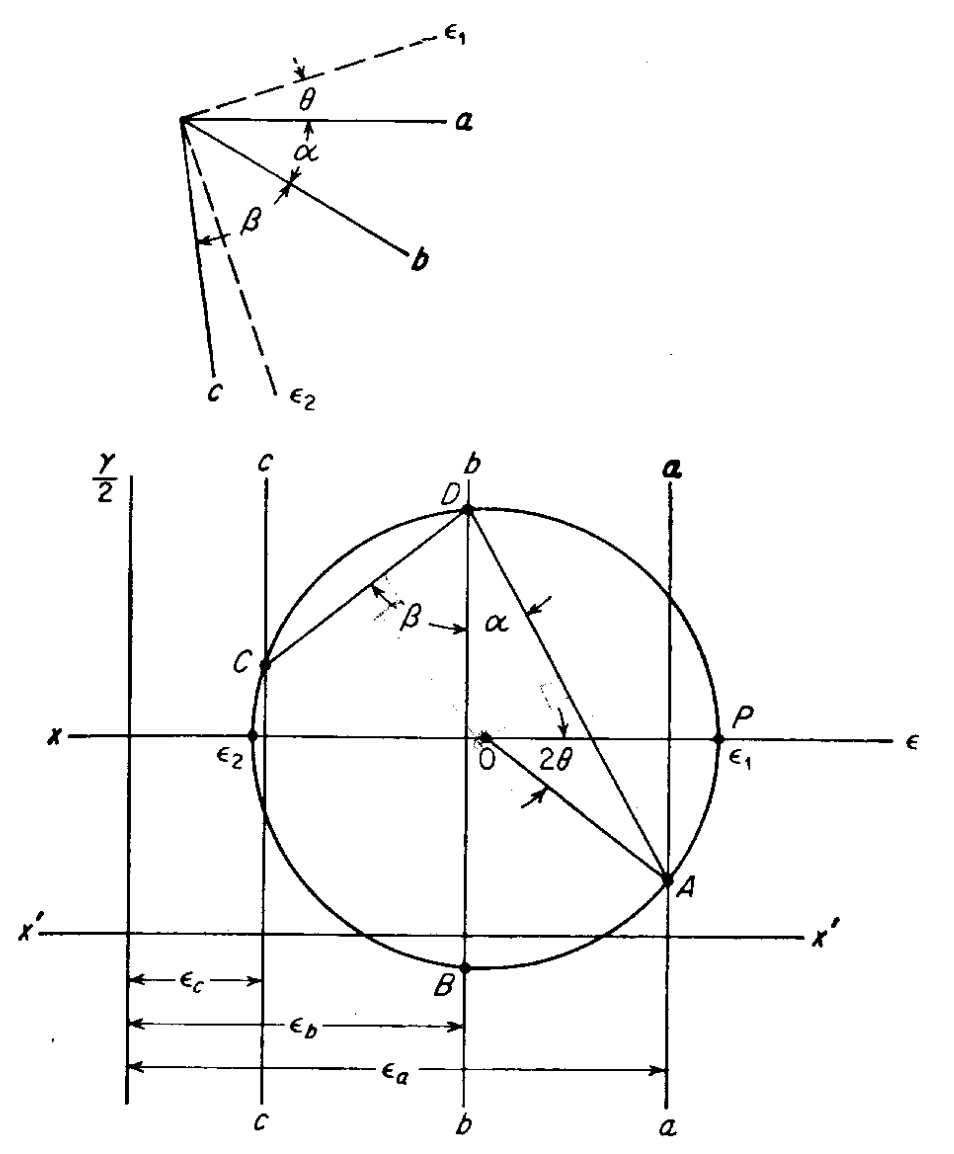
Um método mais conveniente para determinar as deformações principais a partir das leituras dos extensômetros, em vez da solução de três equações simultâneas com três incógnitas, é o uso do círculo de Mohr. Ao construir uma representação do círculo de Mohr para deformação, os valores de deformação linear normal ϵ são plotados ao longo do eixo x, e a deformação de cisalhamento γ dividida por 2 (ou ϵxy) é plotada ao longo do eixo y. A figura a seguir mostra a construção do círculo de Mohr para a roseta de extensômetro generalizada ilustrada no topo da figura. As leituras dos extensômetros ϵa, ϵb e ϵc para deformações normais estão disponíveis para três extensômetros situados em ângulos arbitrários α e β. O objetivo é determinar a magnitude e a orientação das deformações principais ϵ1 e ϵ2.
- Ao longo de um eixo arbitrário X’X’ trace linhas verticais aa, bb e cc correspondentes às deformações ϵa, ϵb e ϵc.
- A partir de qualquer ponto na linha bb (extensômetro do meio), trace uma linha DA formando um ângulo α com bb e que intercepta aa no ponto A. Da mesma forma, trace DC interceptando cc no ponto C.
- Construa um círculo passando por A, C e D. O centro deste círculo está em O, determinado pela interseção das mediatrizes perpendiculares a CD e AD.
- Os pontos A, B e C no círculo fornecem os valores de ϵ e γ/2 (medidos a partir do novo eixo x que passa por O) para os três extensômetros.
- Os valores das deformações principais são determinados pela interseção do círculo com o novo eixo x que passa por O. A relação angular de ϵ1 com o extensômetro a é metade do ângulo AOP no círculo de Mohr (AOP = 2θ).
Uma roseta de deformação de 60° (delta) em um ponto de uma superfície livre fornece as seguintes medições: ε(0°) = 100 μ, ε(60°) = -200 μ e ε(120°) = 300 μ. Determine (a) as deformações principais no plano (ε₁ e ε₂) e (b) a deformação de cisalhamento máxima verdadeira (γmax).
Solução
Lembre-se de que:
A deformação de cisalhamento máxima é
Correlação de Imagem Digital (DIC)
Outro método para medir deformações superficiais, especialmente em testes mecânicos em micro e nanoescala, é a Correlação de Imagem Digital (DIC). Este método óptico sem contato utiliza câmeras digitais para rastrear o movimento de um padrão de pontos (speckle) aplicado à superfície de um objeto. Ao comparar imagens do objeto antes e durante a deformação, o software DIC pode calcular o deslocamento e a deformação em toda a superfície.
Claro. Aqui estão descrições concisas para cada método de padronização em diferentes escalas.
Métodos de Padronização em Macroescala
- Spray de Tinta: Uma fina névoa de tinta (por exemplo, preto fosco) é pulverizada sobre uma camada de base contrastante (por exemplo, branco fosco) para criar um padrão aleatório de gotículas adequado para DIC de uso geral.
- Marcadores e Carimbos: Um padrão aleatório de pontos é aplicado manualmente com marcadores para testes rápidos ou transferido de forma consistente usando um carimbo aleatório pré-fabricado.
Métodos de Padronização em Microescala
- Deposição de Nanopartículas: Nanopartículas suspensas em um solvente são aerografadas ou gotejadas sobre uma superfície; o solvente evapora deixando um padrão fino e aleatório de pontos, ideal para análise por Microscopia Eletrônica de Varredura (MEV).
- Fotolitografia: Um revestimento fotossensível é exposto à luz UV através de uma máscara de padrão aleatório para criar um padrão de pontos muito preciso e durável.
- Litografia por Feixe de Elétrons (E-Beam): Um feixe focalizado de elétrons escreve um padrão aleatório de altíssima resolução sobre uma camada superficial sensível, oferecendo excelente controle sobre o tamanho das características.
- Fresamento por Feixe de Íons Focalizados (FIB): Um feixe de íons de alta energia grava fisicamente um padrão aleatório diretamente na superfície da amostra, garantindo adesão perfeita, pois o padrão faz parte do próprio material.
- Microestrutura Inerente: As características naturais do próprio material, como contornos de grãos metálicos ou diferentes fases, são usadas como padrão, eliminando a necessidade de qualquer aplicação artificial.
Métodos de Padronização em Nanoescala
- Nanopartículas Auto-Organizadas: Nanopartículas ou pontos quânticos são quimicamente induzidos a se organizarem em uma monocamada aleatória, criando um padrão denso adequado para imageamento em nanoescala.
- Estrutura Atômica/Cristalina: Nas maiores ampliações, a própria rede atômica do material é imageada e usada como padrão, permitindo a medição direta da deformação no nível do cristal.
O princípio básico da DIC envolve capturar uma imagem de referência da superfície com pontos em um estado não deformado. À medida que o corpo se deforma, uma série de imagens é tirada. O software DIC então divide a imagem de referência em subconjuntos menores (facetas) e rastreia o movimento desses subconjuntos nas imagens subsequentes do corpo deformado, analisando o padrão único em escala de cinza dentro de cada um. Esse rastreamento fornece um mapa de deslocamentos, a partir do qual os campos de deformação podem ser calculados.
Para análise de deformação bidimensional, uma única câmera pode ser usada. No entanto, para superfícies complexas ou para medir deslocamentos fora do plano, uma configuração de DIC estéreo com duas câmeras é empregada para fornecer medições tridimensionais.
Enquanto na macroescala os extensômetros podem oferecer maior precisão para deformações muito pequenas (por exemplo, inferiores a 300 microdeformações), a DIC fornece uma ferramenta poderosa e abrangente para entender o comportamento mecânico de campo completo de materiais e estruturas.
- De George E. Dieter, Metalurgia Mecânica (1961), 1ª edição, McGraw-Hill.↩︎