Degrés de liberté
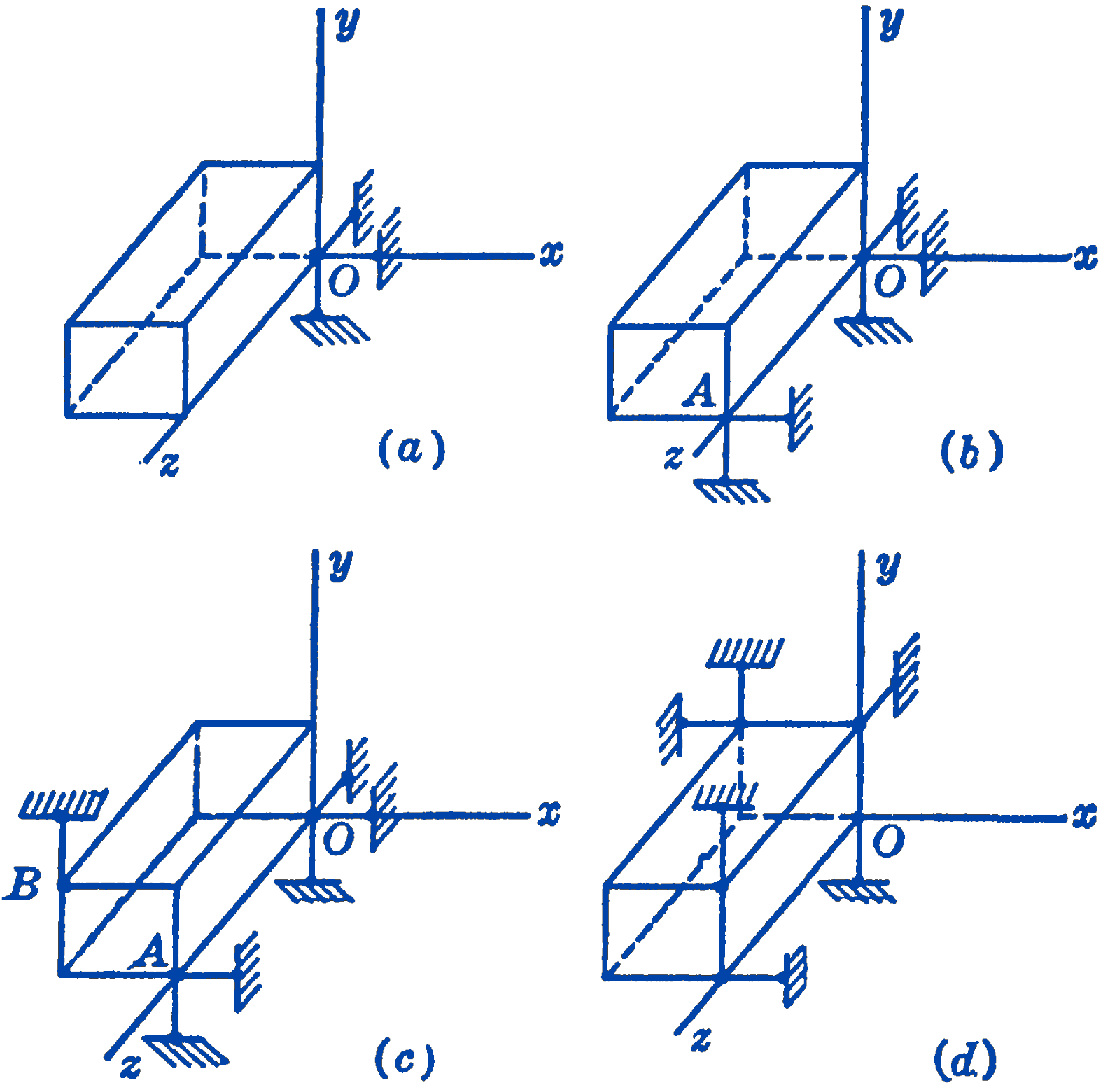
Dans de nombreux problèmes rencontrés dans la conception d'instruments et de machines, on ne souhaite pas contraindre complètement un corps, mais on désire autoriser certains types de mouvement ou de liberté. Par le nombre de degrés de liberté d'un système, on entend le nombre de coordonnées indépendantes qu'il faudrait spécifier pour déterminer complètement la position de chaque partie du système. Un corps rigide qui ne pourrait se déplacer que le long d'une ligne droite, par exemple, aurait un degré de liberté, puisqu'une seule coordonnée, la distance d'un point arbitraire au corps, suffirait à déterminer la position du corps. Un corps qui ne pourrait que tourner autour d'un axe serait également un système à un degré de liberté, car seul l'angle de rotation est nécessaire pour déterminer la position de toutes les parties du corps. En se référant à la Fig. 1a de Section : Contrainte Complète d'un Corps Rigide dans l'Espace (reproduite ci-dessous), on verra que ce système, qui est soutenu par trois contraintes, a trois degrés de liberté, puisque, par exemple, trois angles autour des trois axes de coordonnées devraient être donnés pour spécifier la position du corps. Dans la Fig. 1b, l'ajout de deux contraintes supplémentaires réduit le nombre de degrés de liberté à un, puisque seule la rotation autour d'un axe est maintenant possible. On trouvera dans tous les cas que le nombre de degrés de liberté du système est égal à six moins le nombre de contraintes. Ce principe est utile en conception, car il indique le nombre de contacts entre le corps et sa structure de support nécessaires pour le type de mouvement désiré.1
- Strong, J., Procedures in Experimental Physics, Prentice-Hall, Inc., New York, 1943, p. 585 .↩︎