برای درک نحوه تبدیل مولفههای تنش به یک دستگاه مختصات جدید در سهبعد، ابتدا حالت سادهتر دوبعدی را مرور میکنیم. ما تبدیل دوبعدی را متفاوت از قبل و با شروع از تبدیل یک بردار بررسی خواهیم کرد.
تبدیل یک بردار در دو بعد
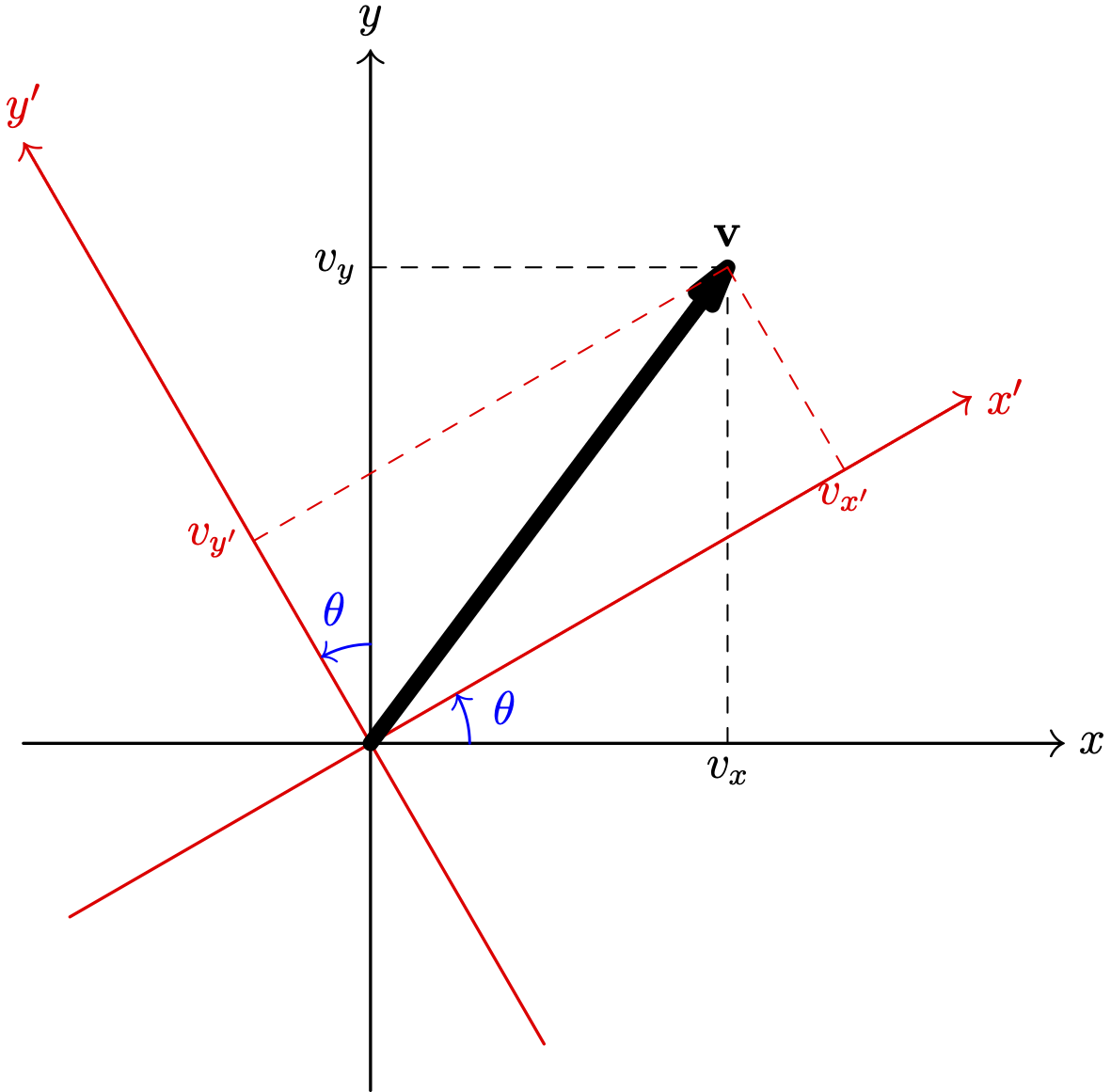
فرض کنید دستگاه مختصات را به اندازه زاویه دوران دادهایم. دستگاه مختصات جدید را x’y’ مینامیم. میخواهیم ببینیم چگونه میتوان مولفههای یک بردار را در دستگاه جدید از مولفههای آن بهدست آورد. یعنی اگر مولفههای یک بردار در دستگاه قدیم و و در دستگاه جدید و باشند (شکل زیر را ببینید)، میخواهیم و را برحسب و بیان کنیم.
رویکرد اول
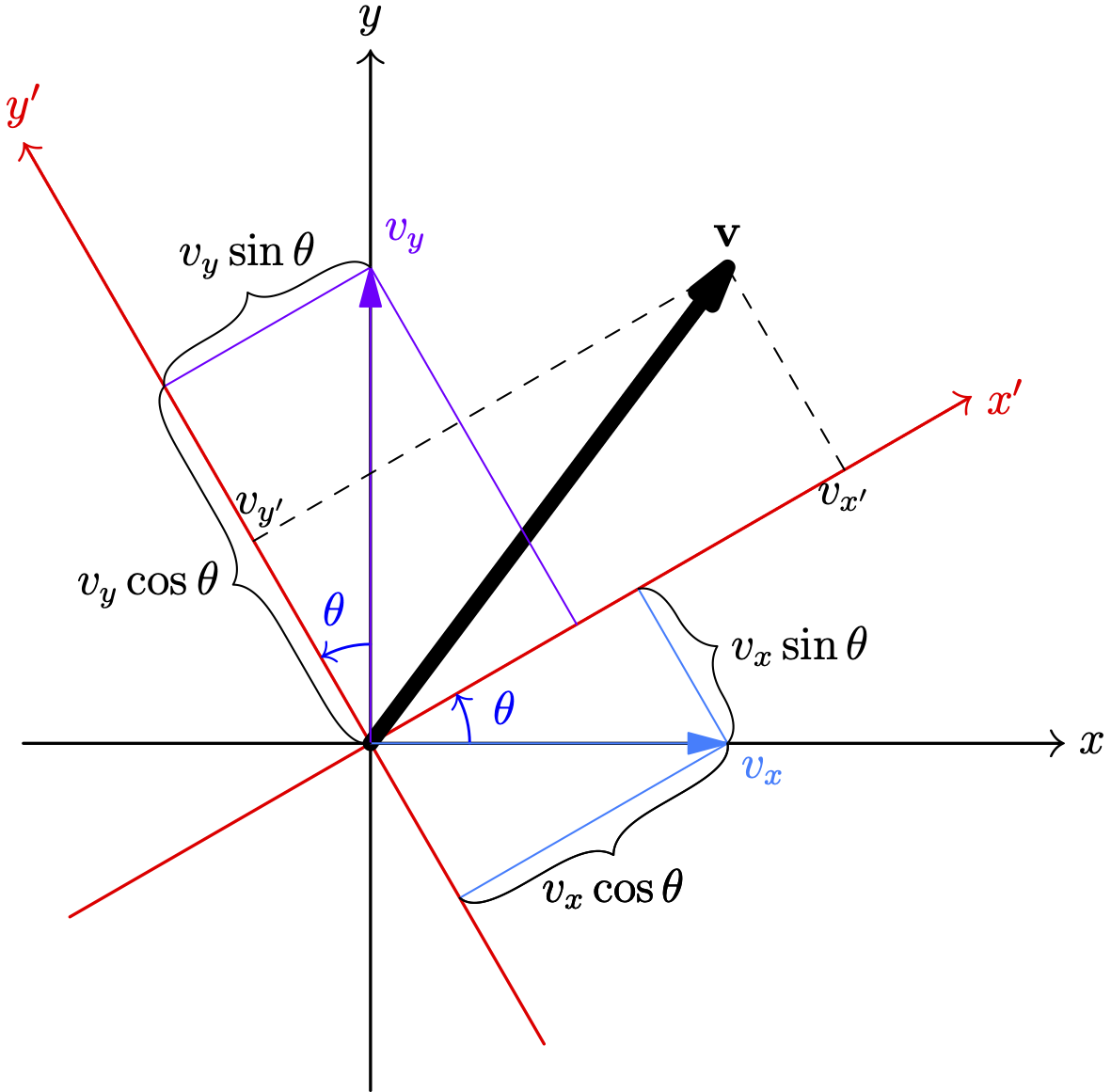
از هندسه (شکل زیر را ببینید) واضح است که میتوان نوشت
با استفاده از نمادگذاری ماتریسی، معادلات فوق را میتوان بهصورت زیر نوشت
رویکرد دوم
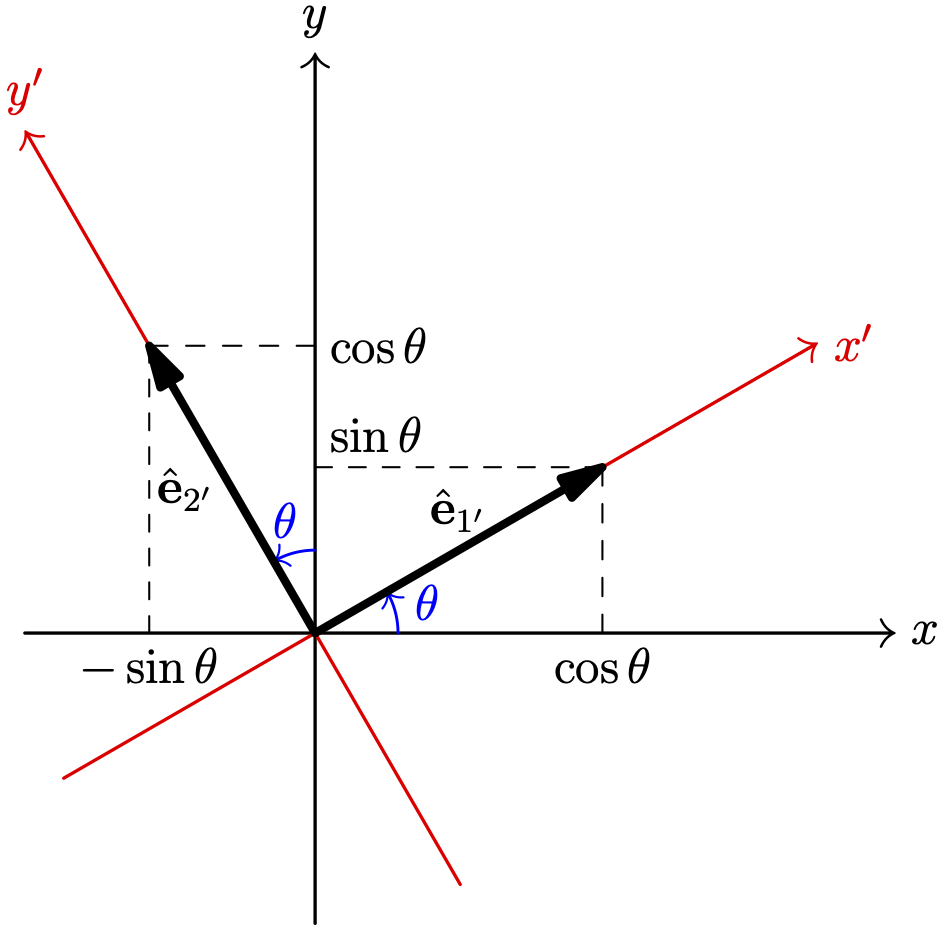
فرض کنید بردارهای یکه در راستای محورهای x و y، و و بردارهای یکه در راستای محورهای 'x و 'y، و باشند. فرض کنید مولفههای یک بردار در دستگاه قدیم و و در دستگاه جدید و باشند. بنابراین، داریم اگر و را برحسب و بیان کرده و این عبارات را در جایگذاری کنیم، عبارتی به شکل بهدست میآید. از آنجا که مولفههای یک بردار در یک پایه یکتا هستند، باید و باشد.
که میتوان آن را بهصورت زیر نوشت
میتوان را بهصورت زیر نوشت
با مقایسه معادله فوق با درمییابیم که باید داشته باشیم
چگونه میتوان را تعیین کرد؟
با شروع میکنیم. ضرب نقطهای هر دو طرف را در مییابیم اما ضرب نقطهای دو بردار یکه برابر با کسینوس زاویه بین آنهاست (که همان کسینوس زاویه بین x و 'x است). همچنین توجه میکنیم که مولفه اول در دستگاه قدیم است بهطور مشابه میتوان نشان داد که یعنی مولفه اول در دستگاه مختصات قدیم است. بهطور مشابه بنابراین، یعنی، ستونهای ماتریس فوق، مولفههای بردارهای یکه دستگاه مختصات جدید در دستگاه مختصات قدیم هستند.
از آنجا که و ، ماتریس L برابر است با و مانند قبل به میرسیم.
تبدیل یک بردار در سه بعد
اکنون حالت کلیتری را در نظر بگیرید. فرض کنید بردارهای یکه در راستای محورهای دستگاه مختصات جدید ، و باشند. بردارهای یکه قدیم را برحسب دستگاه مختصات جدید بیان کنید: ممکن است بپرسید ، ، ... چه هستند. برای تعیین ، حاصلضرب اسکالر (نقطهای) و را مییابیم: از آنجا که ها متقابلاً عمود بوده و طول هر یک ۱ است، آنگاه بنابراین، زیرا زاویه بین و همان زاویه بین محورهای و است. همچنین توجه داریم که مولفه اول در دستگاه قدیم است.
بهطور مشابه، که همان مولفه اول است.
بهطور کلی، داریم
اکنون میخواهیم مولفههای یک بردار را در دستگاه مختصات جدید بنویسیم. فرض کنید ، و مولفههای این بردار در دستگاه مختصات قدیم باشند. بنابراین، اگر ها را در معادله فوق با معادلات (12) جایگزین کنیم، بهدست میآوریم: اگر در دستگاه مختصات جدید، مولفههای عبارت باشند از ، و ، آنگاه داریم با مقایسه (16) و (17)، بهدست میآوریم یا بهطور فشرده، میتوان (18) را بهصورت ماتریسی زیر نوشت: یا
ماتریسهای متعامد یکه
ماتریس L یک خاصیت ویژه دارد: وارون آن همان ترانهاده اش است؛ یعنی به چنین ماتریسهایی ماتریسهای متعامد یکه گفته میشود، زیرا هر ستون (و هر سطر) آن بردارهای یکهای هستند که متقابلاً عمودند.
تبدیل تنش
اکنون زمان آن است که بررسی کنیم چگونه میتوان مولفههای تنش را در دستگاه مختصات جدید برحسب مولفههای آن در دستگاه قدیم بیان کرد.
به یاد آورید که برای یافتن بردار تنش (یا بردار کشش) ، کافیست تانسور تنش را در بردار یکه عمود بر صفحه () ضرب کنیم؛ یعنی، حال اگر دستگاه مختصات را تغییر دهیم، همانطور که یاد گرفتیم، میتوانیم بردار کشش را در دستگاه جدید بیان کنیم: با این حال، وقتی از دستگاه مختصات جدید استفاده میکنیم، بردار یکه عمود نیز در همین دستگاه بیان میشود. یعنی باید با کار کنیم، نه . 1 با این وجود، با ضرب هر دو طرف در وارون L (که همان ترانهاده آن است زیرا L یک ماتریس متعامد یکه است) از راست، بهدست میآوریم حال اگر را در معادله (24) با (25) جایگزین کنیم، بهدست میآوریم معادله فوق نشان میدهد که همان تنش در دستگاه مختصات جدید است، زیرا با ضرب بردار یکه عمود بر هر صفحه دلخواه در دستگاه جدید، بردار کشش را در دستگاه جدید بهدست میدهد. بنابراین، که در آن L ماتریسی است که ستونهای آن مولفههای بردارهای یکه در دستگاه مختصات قدیم هستند.
اکنون فرمول را برای یک مسئله دوبعدی که محورهای x و y به اندازه دوران کردهاند، ببینیم. در این حالت: بنابراین، و
از معادلات فوق نتیجه میشود که که همان معادلاتی هستند که قبلاً بهدست آوردیم.
پیوست: بسط بردار در پایههای متعامد یکه
فرض کنید بردارهای یکهای هستند که بر هم عمودند. هر برداری در را میتوان به صورت زیر نوشت: برای یافتن ، ضرب داخلی را با بگیرید: از آنجا که پایه متعامد یکه است: به طور مشابه:
توجه کنید که ما همچنان از کلاه برای بردار یکهٔ نرمال در دستگاه مختصات جدید استفاده میکنیم زیرا در این دستگاه جدید طول یک بردار تغییر نمیکند؛ بنابراین، یک بردار یکه همچنان یک بردار یکه باقی میماند.↩︎