درجات آزادی
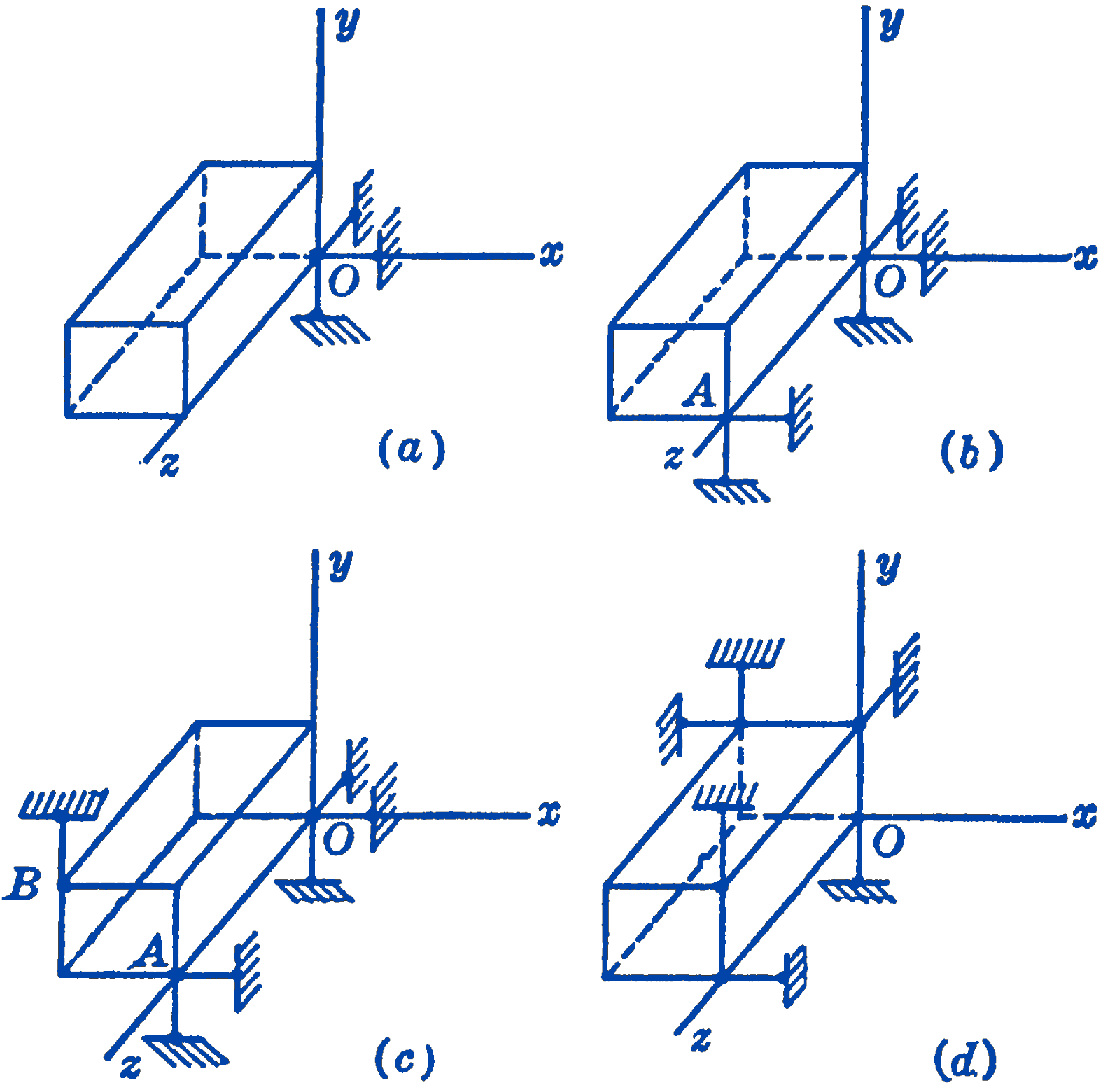
در بسیاری از مسائلی که در طراحی ابزار و ماشینآلات پیش میآید، فرد مایل نیست یک جسم را بهطور کامل مقید کند، بلکه میخواهد انواع خاصی از حرکت یا آزادی را امکانپذیر سازد. منظور از تعداد درجات آزادی یک سیستم، تعداد مختصات مستقلی است که برای تعیین کامل مکان هر بخش از سیستم باید مشخص شوند. برای مثال، یک جسم صلب که تنها میتواند در امتداد یک خط راست حرکت کند، دارای یک درجه آزادی خواهد بود، زیرا تنها یک مختصات، یعنی فاصله از یک نقطه دلخواه تا جسم، برای تعیین موقعیت جسم کافی است. جسمی که تنها میتواند حول یک محور بچرخد نیز یک سیستم با یک درجه آزادی است، زیرا تنها زاویه چرخش برای تعیین مکان تمام بخشهای جسم مورد نیاز است. با مراجعه به شکل 1a از بخش: مقیدسازی کامل یک جسم صلب در فضا (که در زیر تکرار شده است)، دیده میشود که این سیستم که توسط سه قید نگه داشته شده است، دارای سه درجه آزادی است، زیرا برای مثال، سه زاویه حول سه محور مختصات باید داده شوند تا مکان جسم مشخص شود. در شکل 1b، افزودن دو قید دیگر تعداد درجات آزادی را به یک کاهش میدهد، زیرا اکنون تنها چرخش حول یک محور ممکن است. در تمام موارد مشخص خواهد شد که تعداد درجات آزادی سیستم برابر است با شش منهای تعداد قیدها. این اصل در طراحی مفید است، زیرا تعداد تماسهای لازم بین جسم و ساختار نگهدارنده را که برای نوع حرکت مورد نظر مورد نیاز است، نشان میدهد.1
- استرانگ، جی.، روشهایی در فیزیک تجربی، انتشارات پرنتیس-هال، نیویورک، ۱۹۴۳، ص. ۵۸۵ .↩︎