Tabla de Contenidos
- 10.1 INTRODUCCIÓN
- 10.2 CONFERENCIA
- 10.2.1 De Cartesianas a Polares: Una Transformación de Coordenadas
- 10.2.2 Números Complejos: Un Marco Multiplicativo
- 10.2.3 Series de Taylor
- 10.2.4 La Belleza de la Fórmula de Euler
- 10.2.5 Logaritmos Complejos y las Perspectivas de Euler
- 10.2.6 Coordenadas Cilíndricas
- 10.2.7 Coordenadas Esféricas
- 10.2.8 Cambios de Coordenadas y Derivadas Parciales
- 10.2.9 La Matriz Jacobiana para Coordenadas Polares
- 10.2.10 El Álgebra de las Transformaciones Complejas
- 10.2.11 Transformaciones Espaciales y el Jacobiano
- 10.2.12 Distorsión de Volumen en Coordenadas Esféricas
- 10.3 EJEMPLOS
- 10.4 ILUSTRACIONES
- EJERCICIOS
10.1 INTRODUCCIÓN
10.1.1 Fundamentos Algebraicos de los Sistemas de Coordenadas
El álgebra es una herramienta poderosa en geometría. En esta conferencia volvemos al concepto de coordenadas y también analizamos otros sistemas de coordenadas. Hemos introducido el espacio como vectores columna como . Podemos pensar en él como una flecha desde el origen hasta el punto . Se habla de los números que aparecen en como coordenadas, mientras que las entradas en son componentes del vector. La mayoría de las veces no distinguimos entre el punto y el vector , ya que los dos objetos pueden identificarse claramente de forma natural. En esta conferencia también veremos otras coordenadas como las polares y las esféricas. Esto será importante al realizar integración.
10.2 CONFERENCIA
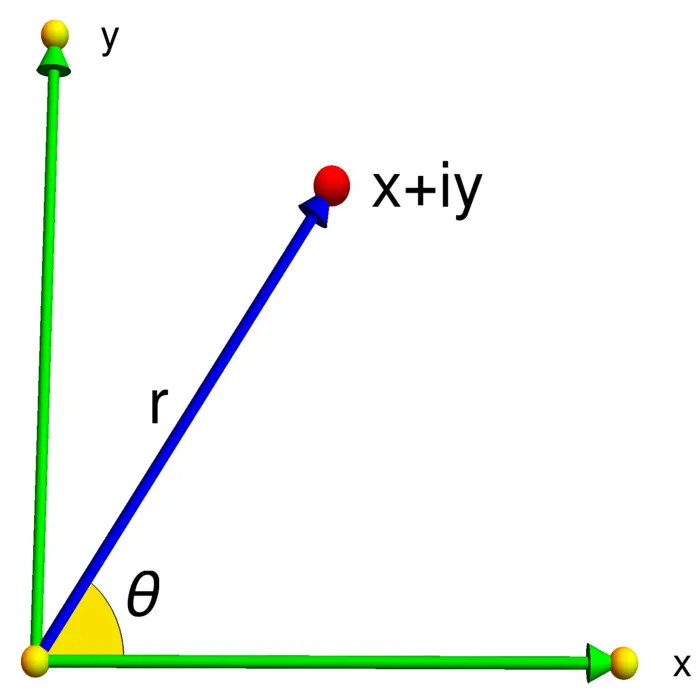
10.2.1 De Cartesianas a Polares: Una Transformación de Coordenadas
Fue René Descartes quien en 1637 introdujo las coordenadas y acercó el álgebra a la geometría.1 Las coordenadas cartesianas en pueden ser reemplazadas por otros sistemas de coordenadas como las coordenadas polares , donde es la distancia radial al y es el ángulo polar formado con el eje positivo. Dado que está en el intervalo , se describe mejor en la notación compleja . El radio es la longitud del número complejo. La conversión de las coordenadas a las coordenadas es \begin{aligned} x&=r \cos (\theta),\\ y&=r \sin (\theta). \end{aligned} El radio es , donde si no es cero, siempre tomamos la raíz positiva. La fórmula del ángulo solo es válida si e son ambos positivos. El ángulo no está definido de manera única en el origen , la mayoría del software simplemente asume .
10.2.2 Números Complejos: Un Marco Multiplicativo
Podemos escribir un vector en también en la forma de un número complejo con el símbolo . Esto no es solo una conveniencia de notación. Los números complejos pueden sumarse y multiplicarse como otros números y aunque , este último tiene una estructura multiplicativa. Para fijar esa estructura, solo se necesita especificar que . Esto da También tenemos Una fórmula de Euler importante vincula las funciones exponencial y trigonométricas:
Teorema 1. .
Demostración. La prueba consiste en escribir la definición de serie en ambos lados. Primero recordemos las definiciones de Si sustituimos obtenemos Pero esto es que es . ◻
10.2.3 Series de Taylor
Si prefiere no ver las funciones , , definidas como series, puede verlas como series de Taylor f(x)=f(0)+f^{\prime}(0) x+f^{\prime \prime}(0) / 2 ! x^{2}+\cdots=\sum_{k=0}^{\infty}\left(f^{(k)}(0) / k !\right) x^{k}. Al diferenciar las funciones en , vemos entonces la conexión.
10.2.4 La Belleza de la Fórmula de Euler
La fórmula de Euler implica para la fórmula mágica
Teorema 2. .
Esta fórmula es a menudo votada como la "fórmula más bonita de las matemáticas".2 Combina "análisis" en la forma , "geometría" en la forma de , "álgebra" en la forma de , la unidad aditiva y la unidad multiplicativa .
10.2.5 Logaritmos Complejos y las Perspectivas de Euler
La fórmula de Euler permite escribir cualquier número complejo como . Dado otro número complejo tenemos , lo que muestra que los ángulos polares se suman y el radio se multiplica. La fórmula de Euler también permite definir el logaritmo de cualquier número complejo como Ahora vemos que pasar de a es una transformación muy natural de a . La función exponencial es un mapa de . Transforma la estructura aditiva en en la estructura multiplicativa porque .
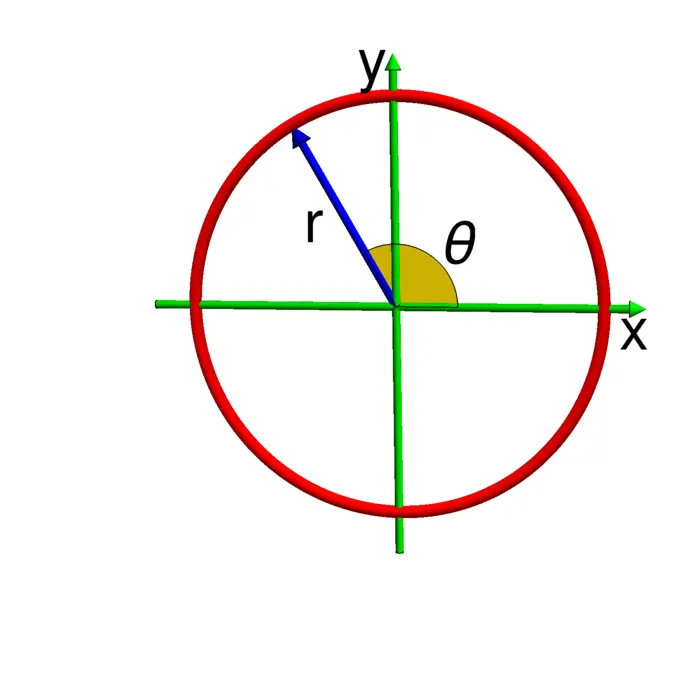
10.2.6 Coordenadas Cilíndricas
En tres dimensiones, podemos considerar las coordenadas cilíndricas que son simplemente coordenadas polares en las dos primeras coordenadas. Un cilindro de radio por ejemplo se da como . El toro se puede escribir como o más intuitivamente como , un círculo en el plano .
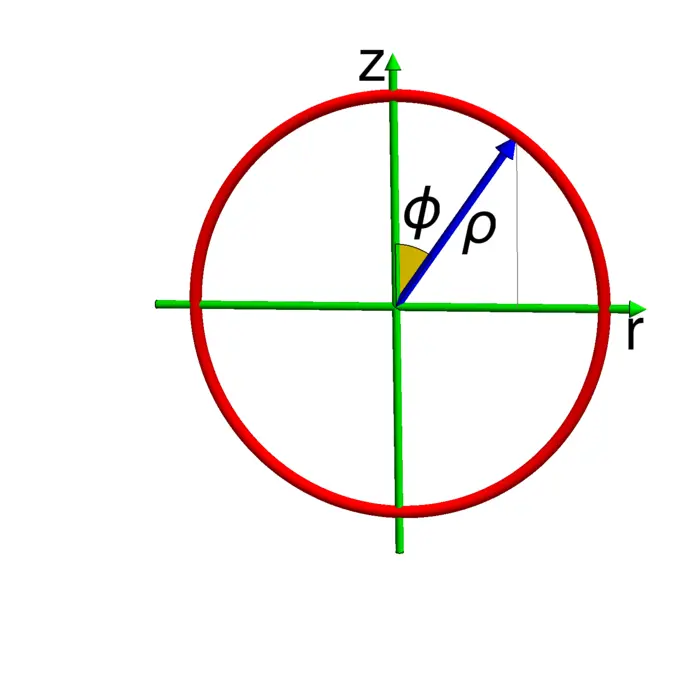
10.2.7 Coordenadas Esféricas
Las coordenadas esféricas , donde . El ángulo es el ángulo polar como en coordenadas cilíndricas y es el ángulo entre el punto y el eje . Tenemos \begin{aligned} \cos (\phi)&=[x, y, z] \cdot[0,0,1] /\big|[x, y, z]\big|=z / \rho,\\ \sin (\phi)&=\big|[x, y, z] \times[0,0,1]\big| /\big|[x, y, z]\big|=r / \rho \end{aligned} de modo que y y por lo tanto \begin{aligned} & x=\rho \sin (\phi) \cos (\theta) \\ & y=\rho \sin (\phi) \sin (\theta) \\ & z=\rho \cos (\phi) \end{aligned} donde , , y .
10.2.8 Cambios de Coordenadas y Derivadas Parciales
Un cambio de coordenadas en el plano es un mapa . Un punto se mapea en . Escribimos para la derivada parcial con respecto a la variable . Por ejemplo .
donde es una matriz llamada la matriz Jacobiana. El determinante se llama el factor de distorsión en .
10.2.9 La Matriz Jacobiana para Coordenadas Polares
Para coordenadas polares, obtenemos
Su factor de distorsión del mapa polar es . Usaremos esto al integrar en coordenadas polares.
10.2.10 El Álgebra de las Transformaciones Complejas
Si con se escribe como entonces es una matriz de rotación-dilatación que corresponde al número complejo f^{\prime}(z)=2 z. El álgebra es la misma que el álgebra de matrices de rotación-dilatación.
10.2.11 Transformaciones Espaciales y el Jacobiano
Un cambio de coordenadas en el espacio es un mapa . Calculamos
Escribimos . Su determinante es un factor de distorsión de volumen.
10.2.12 Distorsión de Volumen en Coordenadas Esféricas
Para coordenadas esféricas, tenemos \begin{aligned} f\left[\begin{array}{l}\rho \\ \phi \\ \theta\end{array}\right]&=\left[\begin{array}{c}\rho \sin (\phi) \cos (\theta) \\ \rho \sin (\phi) \sin (\theta) \\ \rho \cos (\phi)\end{array}\right],\\ d f\left[\begin{array}{l}\rho \\ \phi \\ \theta\end{array}\right]&=\left[\begin{array}{rrr}\sin (\phi) \cos (\theta) & \rho \cos (\phi) \cos (\theta) & -\rho \cos (\phi) \sin (\theta) \\ \sin (\phi) \sin (\theta) & \rho \cos (\phi) \sin (\theta) & \rho \cos (\phi) \cos (\theta) \\ \cos (\phi) & -\rho \sin (\phi) & 0\end{array}\right]. \end{aligned} El factor de distorsión es .
10.3 EJEMPLOS
Ejemplo 1. El punto corresponde al número complejo . Tiene las coordenadas polares . Como tenemos , verificamos lo que coincide con
Ejemplo 2.
- corresponde a las coordenadas esféricas .
- El punto dado en coordenadas esféricas como es el punto .
Ejemplo 3.
- El conjunto de puntos con en forma un círculo.
- El conjunto de puntos con en forma una esfera.
- El conjunto de puntos con coordenadas esféricas son puntos en el eje positivo.
- El conjunto de puntos con coordenadas esféricas forma un semiplano en el plano .
- El conjunto de puntos con forma una esfera. En efecto, multiplicando ambos lados por , obtenemos lo que significa , que después de completar el cuadrado es igual a .
Ejemplo 4. Para , tiene y factor de .
Ejemplo 5. Encuentre la matriz jacobiana y el factor de distorsión del mapeo Respuesta: Escriba tanto la transformación como el jacobiano: La matriz jacobiana es .
10.4 ILUSTRACIONES
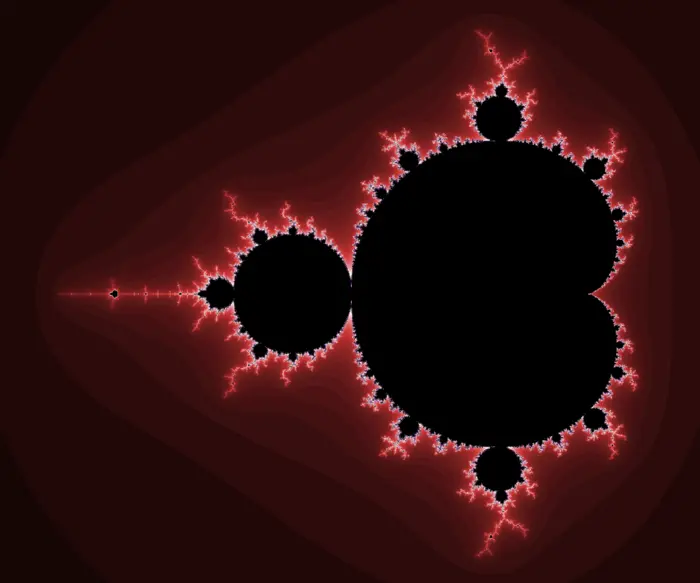
10.4.1 La complejidad de Mandelbrot
Sea definida como , donde . El conjunto de todos los para los cuales los iterados permanecen acotados es el conjunto de Mandelbrot . Para obtenemos , de modo que es o bien o . El punto está en . El punto da , , . Por inducción se muestra que no converge. El punto no está en .
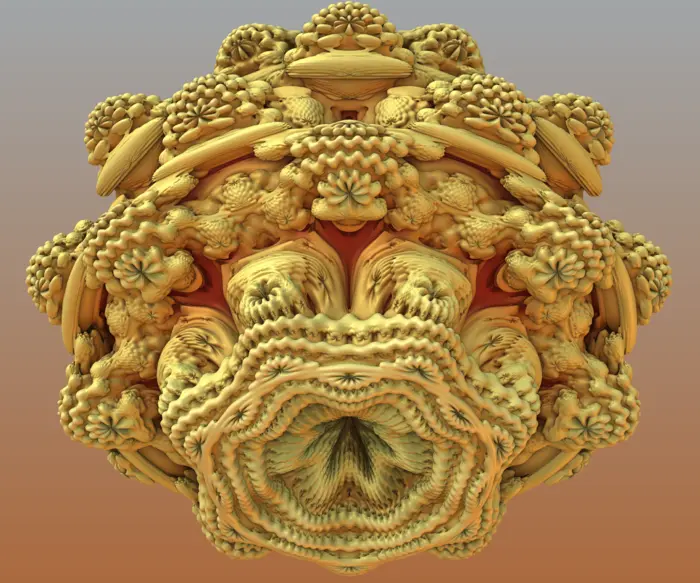
10.4.2 De Mandelbrot a Mandelbulb
Si es la transformación en que en coordenadas esféricas está dada por , donde tiene coordenadas esféricas si tiene . Resulta que da un buen análogo del conjunto de Mandelbrot, el Mandelbulb.
EJERCICIOS
Ejercicio 1.
- Encuentre las coordenadas polares de .
- ¿Qué punto tiene las coordenadas polares ?
- Encuentre las coordenadas esféricas del punto .
- ¿Qué punto tiene las coordenadas esféricas ?
Ejercicio 2.
- Calcule para para , , . ¿Está en el conjunto de Mandelbrot?
- ¿Cuál es el número "ojo por ojo" ? (Puede usar ).
Ejercicio 3.
- ¿Qué superficie se describe como ?
- Describa la hipérbola en coordenadas polares.
- ¿Qué superficie se describe como ?
- Describa el hiperboloide en coordenadas esféricas.
Ejercicio 4.
- Calcule la matriz jacobiana y el factor de distorsión del cambio de coordenadas (mapa de Chirikov).
- Calcule la matriz jacobiana y el factor de distorsión del cambio de coordenadas (mapa clásico de Hénon).
P.D. Cuando se realiza el cambio de coordenadas del mapa de Chiriov una y otra vez, se puede observar caos. En el caso del mapa de Hénon, se ve un atractor extraño, un objeto fractal que, de manera similar a la curva de Koch encontrada la semana pasada, tiene una dimensión mayor que .
Ejercicio 5.
- Verifique que el conjunto de Mandelbrot está contenido en el conjunto . Como recordatorio, esto significa que debe demostrar que entonces escapa al infinito.
- Opcional: Utilice el mismo argumento para ver que el conjunto de Mandelbulb está contenido en el conjunto .