刚性框架
一种非常常见的结构类型是由直杆件连接在一起构成的刚性框架。这种框架的杆件通常是承受拉力或压力的细长杆。 “刚性框架”一词的含义如图 1 所示。
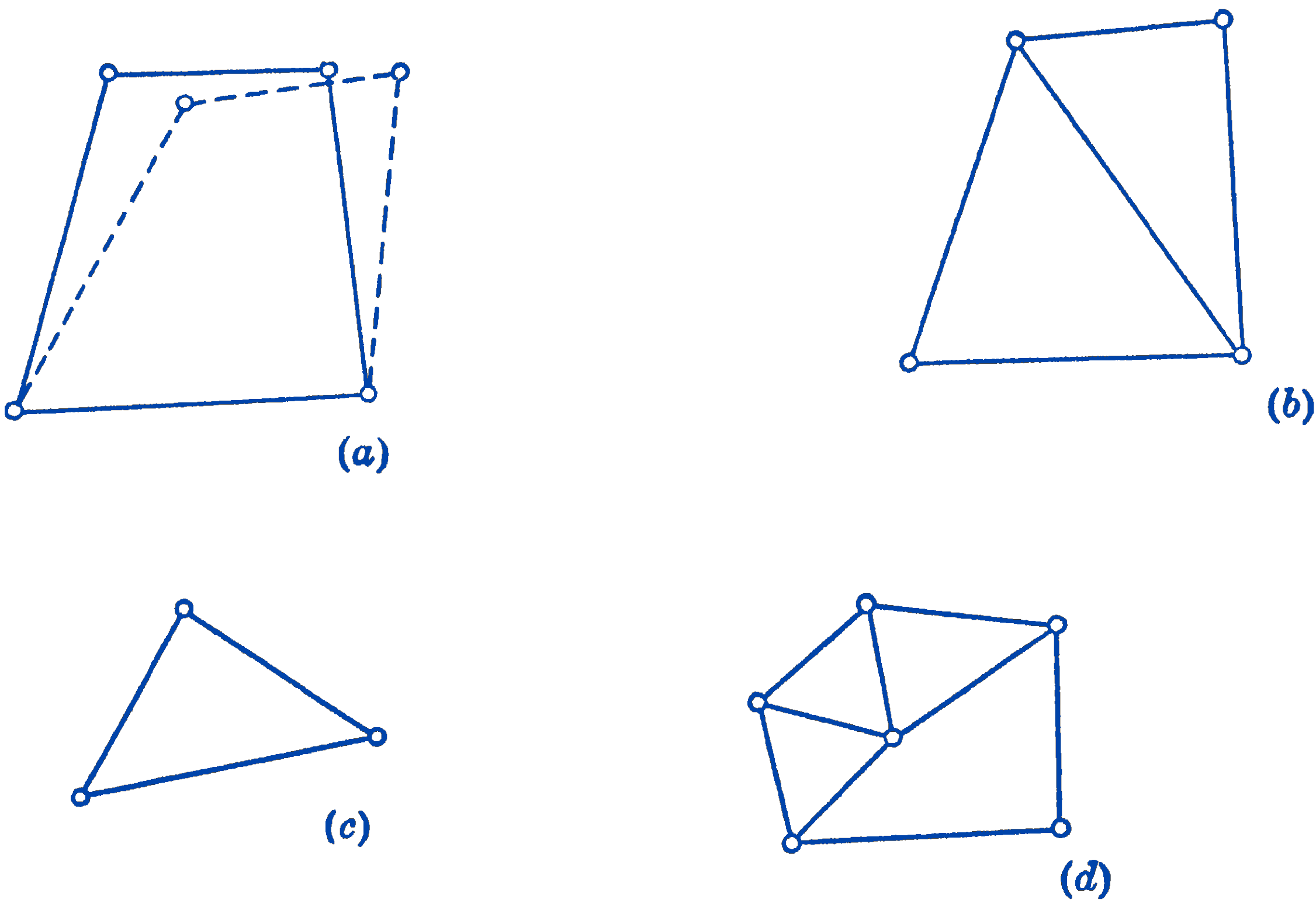
在图 1a 中,显示了一个由四根在端部销接在一起的杆件组成的框架。可以看出,这种布置不是刚性框架,因为整个系统可以像虚线所示那样发生变形,而不会改变杆件的尺寸。然而,可以通过增加一根杆件来防止这种变形,如图 1b 所示。现在由两个三角形部分组成的框架将是刚性的。最简单的刚性系统是三角形框架(图 1c),任何由三角形部分组成的复杂系统(如图 1d)也将是刚性框架。
对于刚性框架,杆件数 与节点数 之间存在确定的关系。假设平面框架的其中一个杆件相对于坐标系是固定的。如果整个框架要保持刚性,那么其余的 个节点在此坐标系中的位置必须由给定的杆件长度决定。每个 节点都有其两个坐标,由另外两根杆件的交点确定。由于一根杆件已经固定,我们还剩下 根杆件来定位节点;因此:
这种关系是刚性平面框架的必要条件。然而,它并不是充分条件,因为杆件的排列方式可能使其对框架的刚度没有贡献。这如图 2 所示。
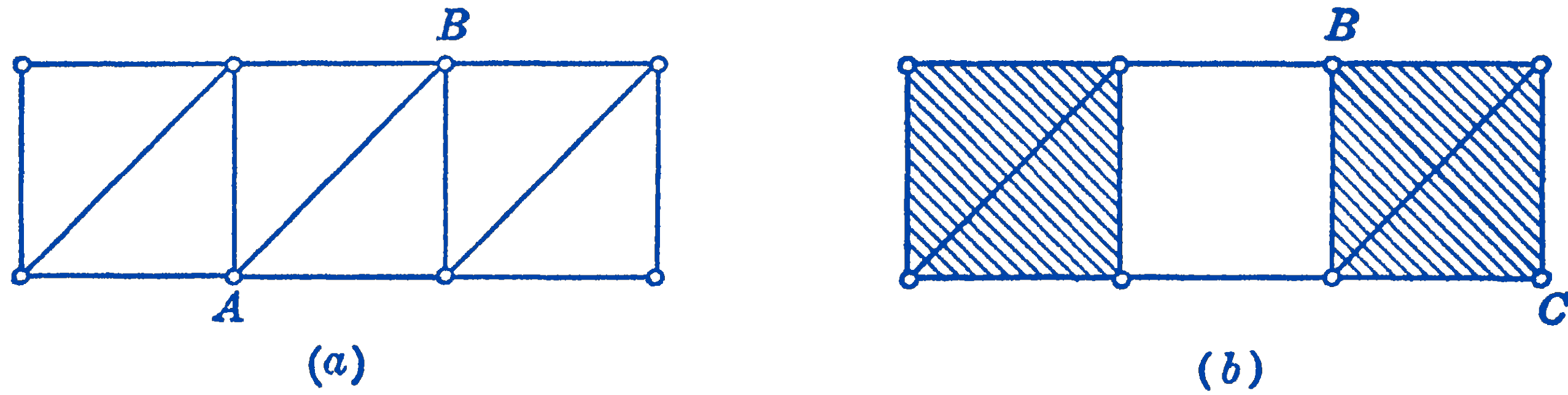
在图 6-2a 中显示了一个满足上述条件的刚性框架。通过将图 6-2b 中的杆件 移动到位置 ,框架变得非刚性,因为右侧阴影部分可以相对于左侧阴影部分进行平移。因此,即使杆件和节点之间具有相同的关系,(b) 中的框架也是非刚性的,因为杆件 的放置位置使其无法保持框架的完全约束。然而,如果满足了必要条件,通常可以通过观察轻松判断框架是否刚性,或者是否存在如上所述的异常情况。
接下来,我们考虑如何通过支撑构件来约束空间中的刚性框架,当框架受到外部力系作用时,这些支撑构件将对框架施加反力。我们假设框架仅承受位于框架平面内的力,因此我们只需考虑框架在平面内的约束。
遵循与章节:力系的平衡中用于建立空间物体完全约束条件相同的推理方法,我们发现,要在平面内完全约束一个物体,必须使用相当于三个不平行、不共点的力,如图 3a 所示。
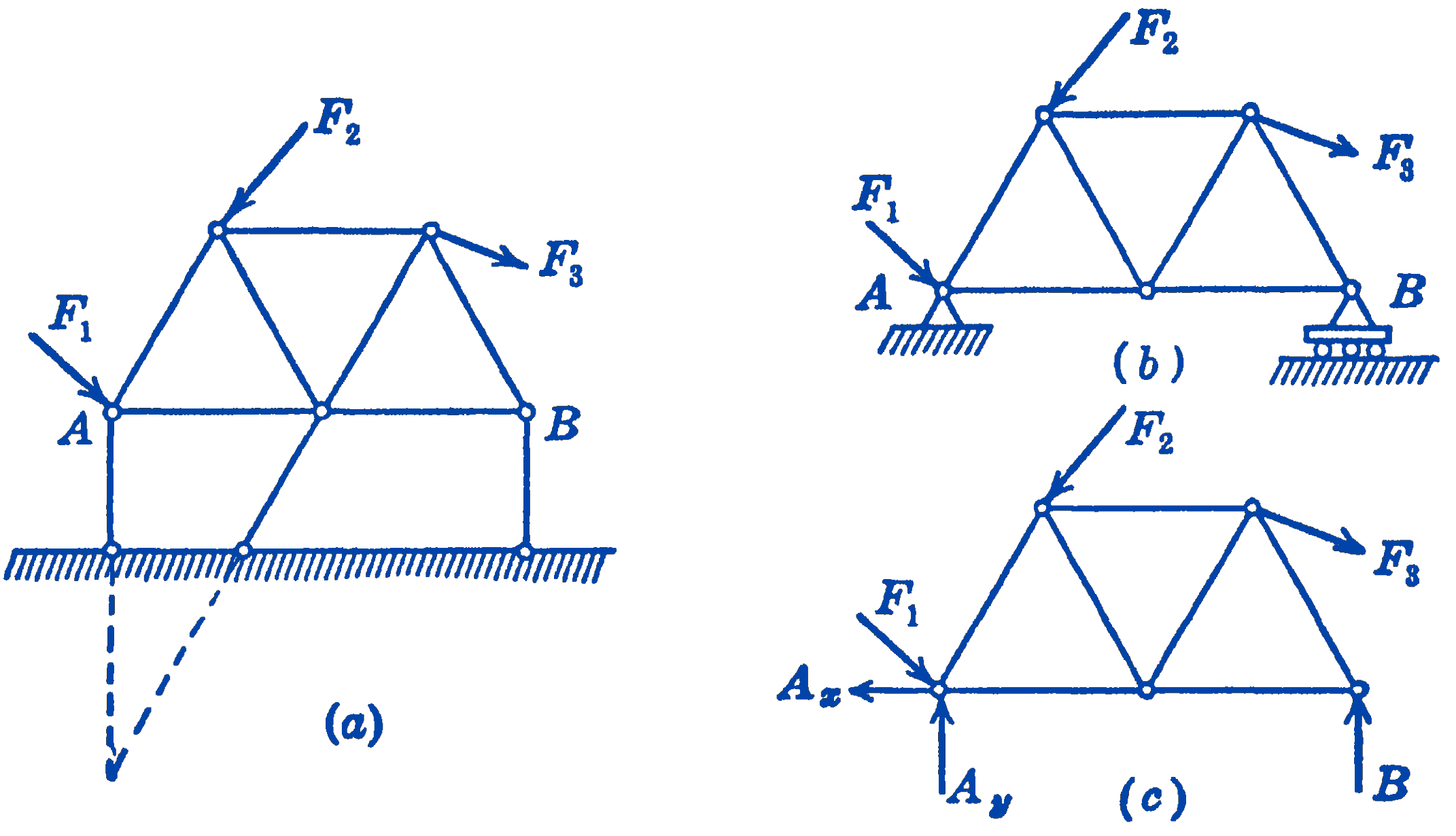
实现这种约束的一种常见方法如图 3b 所示,其中框架的一端由销钉支撑,该销钉可以在平面内的任何方向上施加反力,而另一端的支撑方式使得只能产生垂直反力。在图 3c 的受力图中,这些支撑由三个反力 和 表示。
我们现在假设受其支撑约束的框架受到外部力系的作用(如图 3 中的 和 ),并研究寻找杆件中未知力和支撑处未知反力的问题。未知要素的总数将是杆件中的 个轴向力,加上三个反力,因此未知力的总数为 (2j)。作用在结构每个节点上的力构成一个共点、共面的力系,为此可以列出两个独立的方程。因此,可以为整个系统列出的独立方程总数为 (),这正好足以确定 () 个未知数。这样的系统被称为静定系统,仅凭平衡方程就足以求解系统中的所有未知力。
然而,系统中可能存在比保持刚性所需的更多的杆件。例如,如果在图 4b 中,我们将杆件 添加到图 4a 中已经刚性的框架中,我们将拥有比方程更多的未知力。

这些额外的杆件被称为多余杆件,它们的存在使问题变得静不定,因为没有足够的平衡方程来求解未知力。为了解决此类静不定问题,必须考虑杆件的变形,因此必须将弹性理论引入该问题中。在本章中,我们将仅限于讨论静定系统。