质点系的虚位移原理
虚位移原理可以直接推广到包括刚体,刚体可以被看作是质点系。组成刚体的各个质点之间存在力,其性质使得质点之间的距离保持不变。然而,这些内力总是成对出现且大小相等、方向相反,因此在整个刚体作为刚体运动期间,它们所做的总功将等于零。
考虑图 1a 所示的刚性构架,它由位于 处的无摩擦销钉支撑,并受到三个外力 、 和 的作用,这些力使系统保持平衡。
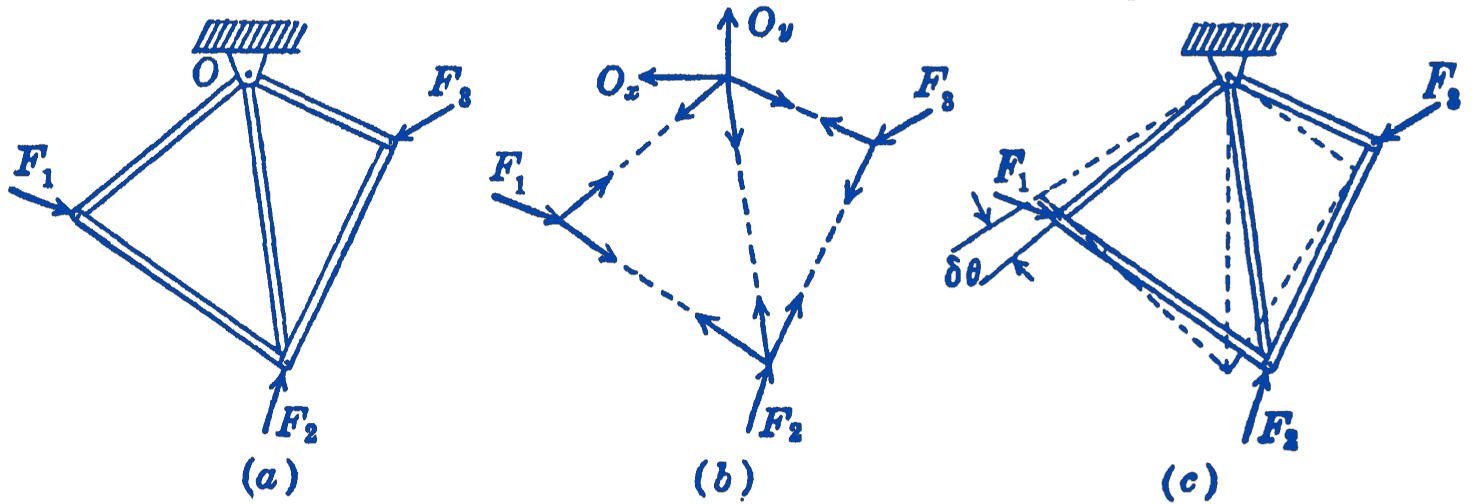
在图 1b 中,显示了系统中所涉及的所有力。可以看出它们有三种:第一,主动外力 、 和 ;第二,刚性杆中的内力,它们成对出现且大小相等、方向相反;第三,销钉 处的反力,图中显示为两个直角分量。现在,如果我们设想系统的虚位移,如图 1c 所示,其中整个构架绕 旋转了一个微小的角度,我们将看到,无论系统是否处于平衡状态,第二种和第三种力所做的功都为零,因此对于平衡条件,我们只需要考虑第一种力,并写作 其中 和 仅是主动力的分量,求和符号表示要包括所有这些主动力。因此,我们通常可以对任何由无摩擦约束和刚性杆组成的系统陈述:系统平衡的充要条件是,在与约束相容的系统任意微小位移上,系统所有主动力所做的总功等于零。这是虚位移原理最普遍的表述。
从上面给出的例子以及接下来的例子中可以看出,虚位移原理的独特优势体现在那些只关心系统主动力之间的平衡关系,而不关心计算反力或内力数值的问题中。这并不意味着虚位移原理永远不能用于确定反力。通常可以这样选择待确定的力系统,使得反力可以被视为主动力,从而可以通过上述方法进行处理。
例 1. 一根刚性、无自重的杆靠在两个无摩擦的墙壁上,如图 2 所示。它由平行于墙壁的两个力 和 保持平衡。在所示位置, 和 之间的关系是什么?
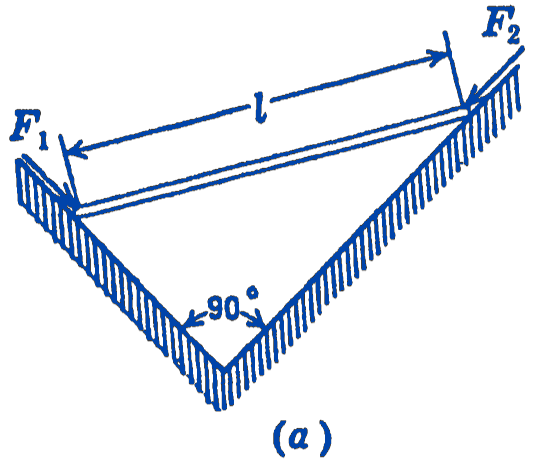
解答。与约束相容的系统位移如图 3 所示。根据系统的几何关系,我们有 ,其中 是常数;我们可以通过微分求得 和 之间的关系:
因此,我们直接得到了 和 之间的关系,而无需考虑或计算反力 和 。如果我们用之前的平衡方程来解决这个问题,我们就会在方程中引入 和 ,然后通过代数方法消去它们。然而,应该记住的是,在许多问题中,求解反力与求解主动力同样重要。
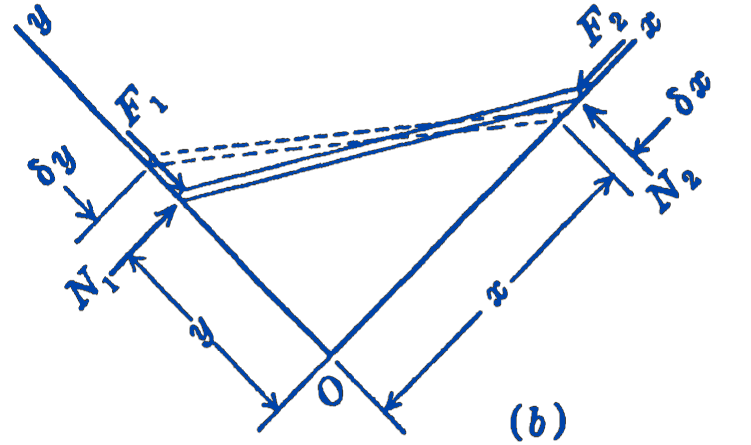
例 2. 求由发动机气缸内气体压力产生的作用力 与绕曲轴轴承 的转矩 之间的平衡关系(图 4)。
解答。系统中的主动力为 ,以及垂直于曲柄 的力 。系统的虚位移如图 (c) 所示,其中包括曲柄绕 的旋转和活塞的平移。
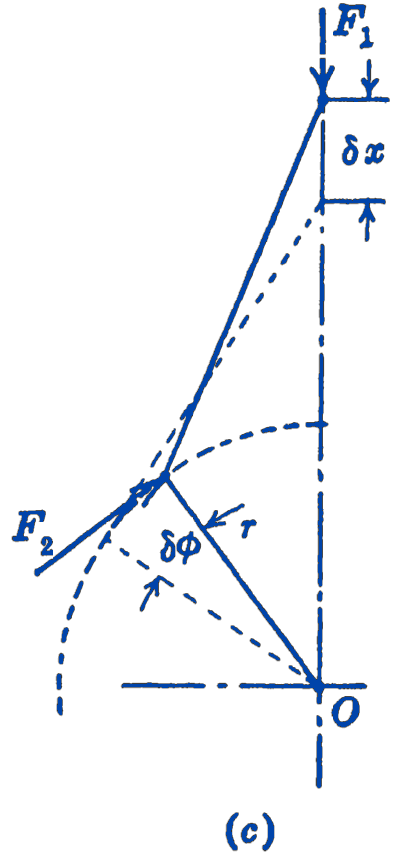
根据虚位移原理,我们有:
例 3. 如图 5 所示,通过螺旋压榨机施加一个压紧力 。螺杆由距离轴线为 处的力 驱动旋转。螺纹的螺距为 ,这里的螺距是指螺杆旋转一周时螺纹前进的距离。求 和 之间的关系。
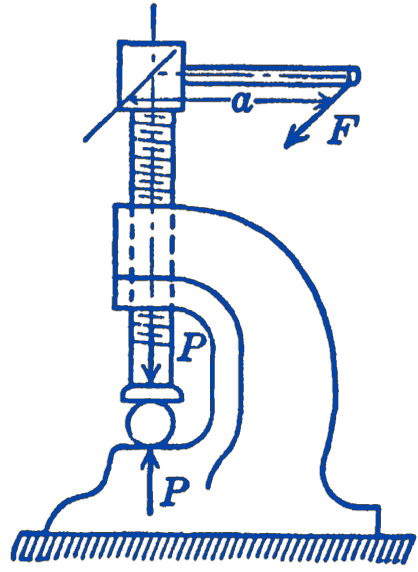
解答。我们取螺杆的一个微小转角 作为系统的虚位移。此时螺杆将前进距离 。根据虚位移原理,我们直接得到:
例 4。如图 6 所示,通过施加力 于由两个相同滑轮组成的系统来提升重物 。求平衡条件下 和 之间的关系。
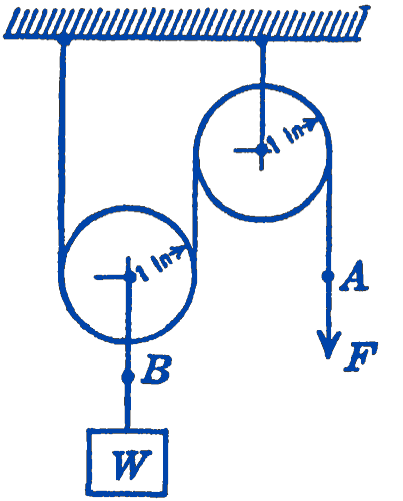
解答。作为系统的虚位移,我们取点 向下的微小垂直运动 。那么点 将被提升 ,根据虚位移原理得到: