自由质点的虚位移原理
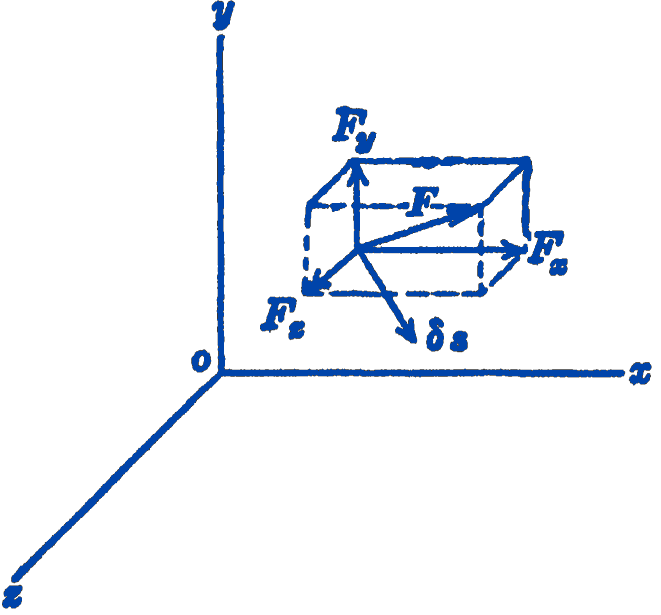
考虑一个可以自由向任何方向运动的质点,它在合力为零的一般力系作用下保持平衡。在图 1 中,示出了该力系中的一个力 及其三个直角分量。
现在我们设想给该质点一个任意的微小位移 。这种位移是任意的,意思是它可以是任何方向。
接下来,我们计算在位移 期间,力 所做的功 。该功 是 和 的标量积。
对于力系中的所有力:
将其写为沿直角坐标系的分量形式,我们有:
如果我们考虑作用在质点上的力构成平衡力系的情况,我们有:。因此,对于任意的 值,都有 。
接下来,我们检验逆命题成立的条件,即在何种条件下,陈述 是系统平衡的充分必要条件。可以看出, 不足以保证平衡的唯一情况是其中一个位移分量为零。例如,如果 那么在存在力分量 的情况下, 仍可能为零。然而,如果在我们对位移 的定义中,要求 和 均不为零(这正是我们用“任意”一词所暗示的),那么表达式 就成为了质点平衡的充分必要条件。
因此,我们将自由质点的虚位移定义为满足 和 均不为零的任意微小位移。我们使用记号 而不是 来表示该位移是任意的,并且可以取任何方向。
因此,虚位移原理1指出,自由质点平衡的条件是,在质点的任何虚位移上所做的功应该等于零。 量 称为系统的虚功,上述原理通常被称为“虚功原理”。
- 这一虚位移原理在某些书中被称为“虚速度”原理。当然,无论人们设想是给系统的各个点赋予一定的速度,还是赋予一定的位移,该方法的应用都是相同的,因为各个点速度之间的比例与这些点位移之间的比例是相同的。↩︎