稳定平衡、不稳定平衡和随遇平衡
为简单起见,让我们考虑一个在平衡位置处于静止状态的系统,该系统只能通过一条路径从该平衡位置向任一方向移动。
这样一个系统如图 1 所示,其中表示了一个光滑圆柱体的四种不同的平衡构型。
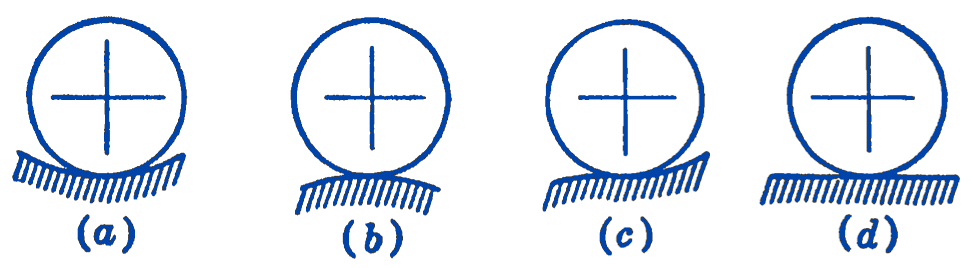
在 (a) 中,圆柱体停留在凹面上;在 (b) 中,停留在凸面上;在 (c) 中,停留在拐点上;在 (d) 中,停留在平面上。应用虚位移原理,可以看出这四个位置都是平衡位置,因为唯一的主动力是垂直重力,且对于圆柱体的无限小滚动位移,圆柱体的重心是水平移动的。我们还可以将这些情况与系统势能在平衡位置必须具有驻值这一事实联系起来。在 (a) 中,系统的势能显然是极小值,因为圆柱体处于其最低位置,要使其向任一方向移动,必须对圆柱体做功。在 (b) 中,系统的势能是极大值,因为圆柱体处于最高位置,当它向任一方向移动时,系统都会做功。 (c) 的拐点对应于一个驻值,因为圆柱体的势能既不是极大值也不是极小值。
还可以看出,图 3-11 所示的位置在物理上有些不同。在 (a) 中,我们可以说我们具有稳定平衡,因为任何偏离平衡位置的运动都会产生使系统返回平衡位置的力;(b) 和 (c) 是不稳定平衡的例子,因为任何偏离平衡位置的运动都会产生使系统进一步偏离平衡位置的力;而 (d) 说明了随遇或中性平衡,其中系统从平衡位置的运动不会影响系统的平衡。
因此,我们可以得出结论:最大势能状态对应于不稳定状态,而最小势能状态对应于稳定状态。
上述考虑可用于检验平衡位置是稳定的还是不稳定的。只需注意当系统偏离平衡位置时,系统的势能是增加还是减少即可。
平衡条件以及稳定和不稳定平衡的检验可以解析地表示如下。假设为简单起见,我们考虑一个系统,其偏离平衡位置的位移可以用一个坐标 来描述。设 为该平衡位置, 为系统在位置 处的势能。现在,随着 的变化以及我们偏离平衡位置,保守系统的势能将是 的某个函数:
如果我们现在写出该函数关于点 的麦克劳林级数展开式,我们有:
根据虚位移原理,我们知道如果点 是平衡位置,则力在偏离点 的任意无限小位移上所做的功为零。因此,如果我们选择一个无限小位移 ,那么对于平衡状态,相应的 将为零。因此,系统在点 处的平衡解析条件变为:
那么,在平衡位置附近的区域内,系统势能的变化由下式给出:
因为项 为零。
因此,通过检查二阶导数的符号,我们可以确定当我们偏离平衡位置时势能是增加还是减少,从而确定系统是稳定的还是不稳定的。
从上述考虑可以看出,虽然通过仅考虑微小位移的一阶项,利用虚位移原理就可以确定平衡位置,但为了判定平衡位置的稳定性或不稳定性,必须研究二阶项。
| 的符号 | 势能 | 平衡 状态 |
|---|---|---|
| 极小值 | 稳定 | |
| 极大值 | 不稳定 |
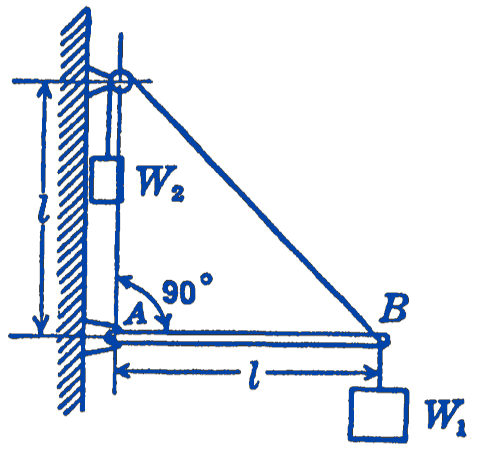
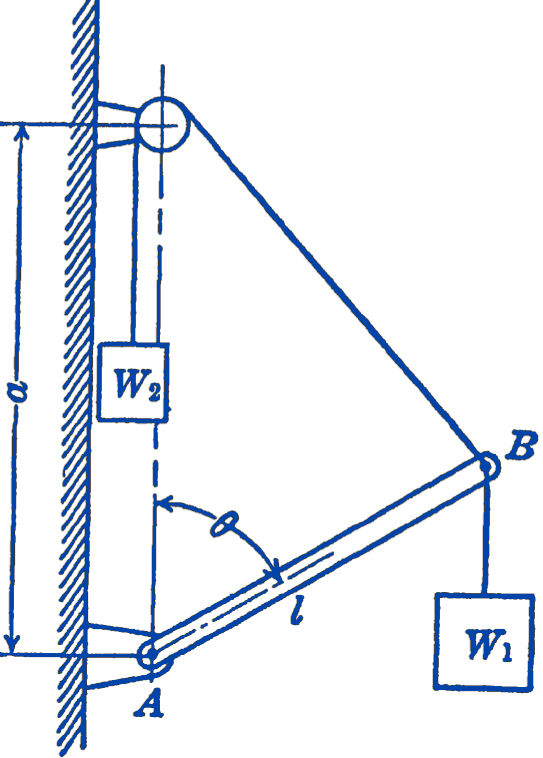
例 1. 如图 3-12 所示,一个重物 由一根刚性无重杆 和一根挂有重物 的缆绳支撑。求当杆 处于水平位置且系统平衡时, 与 之间的关系,并确定该平衡位置是稳定的还是不稳定的。
解。我们将用两种方法来解决这个问题,第一种是利用虚位移原理,第二种是通过势能考虑。
第一种方法
我们取重物 的微小下降作为系统的虚位移,我们称之为 。然后我们可以从系统的几何结构中求出 上升的距离 。
通过将关于点 的力矩设为零以求平衡,可以非常简单地验证这个答案。
为了研究该平衡位置的稳定性,我们必须看看将系统从平衡位置移开是否需要对系统做功,或者系统本身在偏离平衡位置时是否可以做功。
系统在偏离平衡位置的位移 期间所做的功为:
注意,我们只剩下一个二阶项 ,因此在研究此类稳定性问题时必须保留二阶项。
由于该功项为正,我们看到系统本身在偏离平衡位置时会做功,即势能会减少,因此该平衡位置是不稳定的。
第二种方法
我们写出系统在靠近平衡位置区域的势能表达式: 其中 是 偏离平衡位置的向下位移, 是系统在平衡位置处的势能(从任意基准面测得)。
平衡条件为:
稳定性检验为:
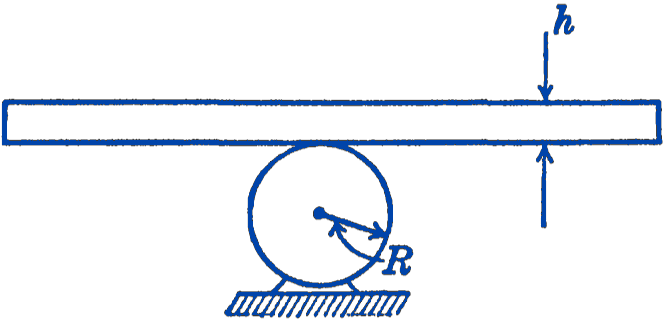
例 2. 一块厚度为 的均匀木板平衡在半径为 的圆柱体顶部(图 3)。假设木板在圆柱体上滚动而不滑动,求平衡位置稳定时 与 之间的关系是什么?
解。考虑由在圆柱体上滚动的木板组成的系统的虚位移 (图 4)。
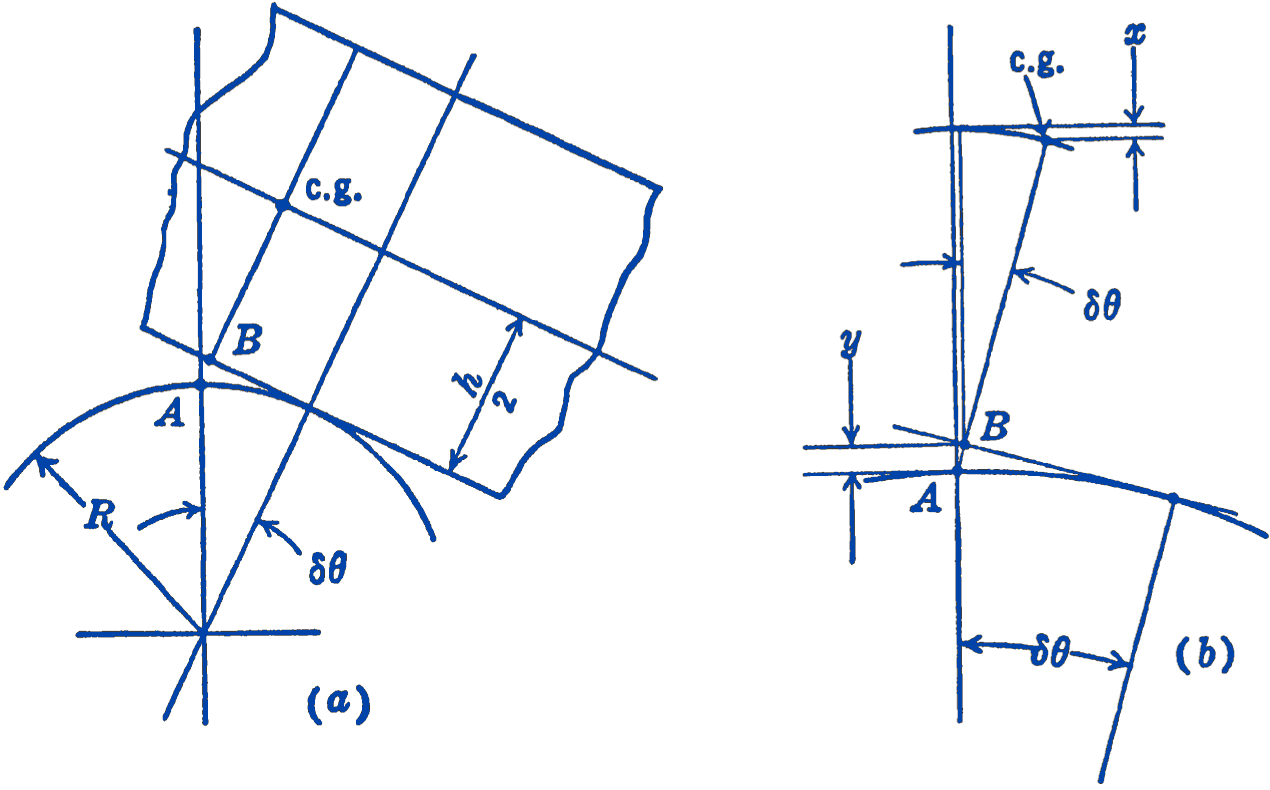
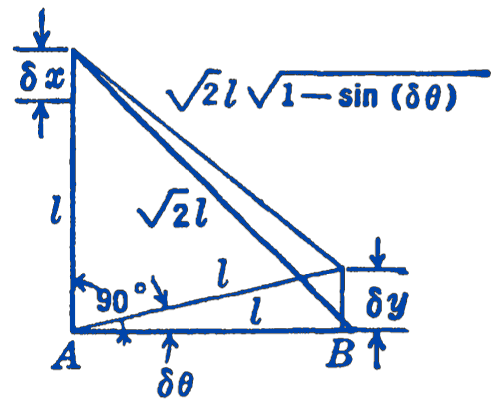
起初,点 和 重合;在虚位移之后,点 和 处于图中所示的位置。我们希望计算在位移 期间木板重心的总垂直移动。如果该垂直移动是向上的,则平衡位置是稳定的。如果该垂直移动是向下的,则平衡是不稳定的。为了求解极限条件,我们寻找使重心没有垂直移动的 与 之间的关系。在图 (b) 中可以看出,总垂直运动可以认为由两部分组成:一部分是由于木板旋转引起的向下分量,在图中标记为 ;另一部分是由于木板滚动引起的向上分量,在图中标记为 。稳定平衡的极限条件将通过使这两个分量相等来确定。
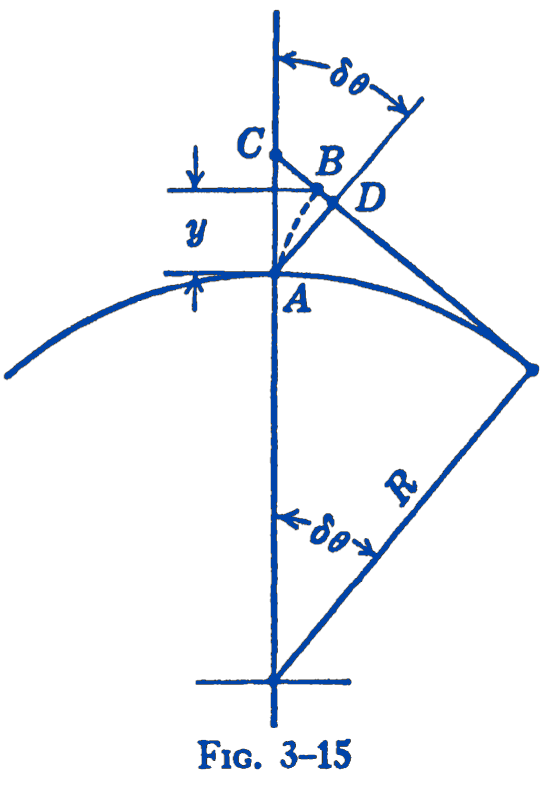
从图中,我们直接得到: 通过保留二阶项但忽略更高阶项,我们有:
为了求 ,注意在图 5 中,长度 小于 ,但大于 的垂直分量。然而,我们可以证明 与 ) 之间的差值仅包含高于二阶的项,因此如果我们仅保留到二阶的项,我们可以认为 。
例如,一块厚度为 的木板将需要一个半径为 的圆柱体。任何更小的圆柱体都将代表不稳定平衡的情况。
3.6.1 习题
1. 如图所示,一扇门可以绕着与竖直方向成 角的轴旋转 。证明该系统有两个平衡位置,其中一个是稳定的,另一个是不稳定的。
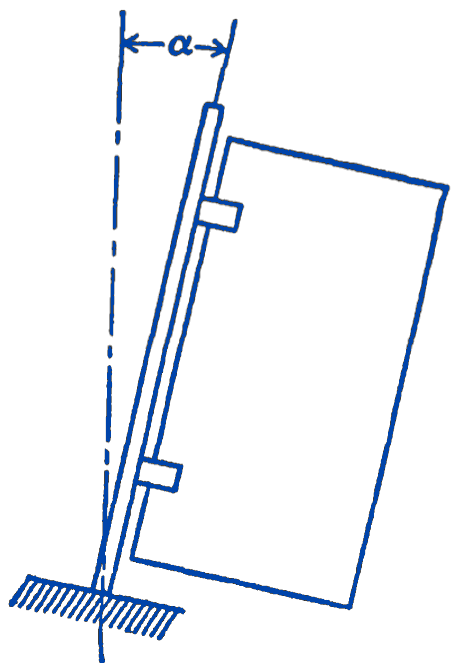
2. 参考前一个问题,确定该均匀杆的平衡位置是稳定的还是不稳定的。
答案
不稳定
3. 一个均匀物体由一个半圆柱体和一个长方体组成,如图所示。求使系统在水平面上保持稳定所允许的 的最大值。假设圆柱体在平面上滚动而不滑动。
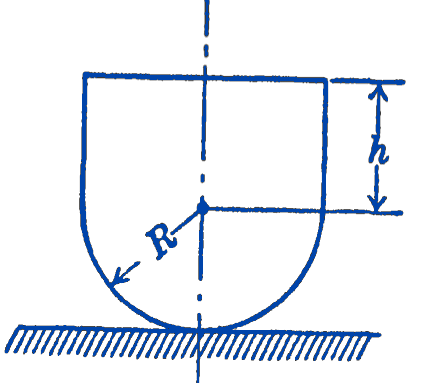
答案
4. 如图所示,一根刚性无重杆 支撑着一个重物 ,并由一根挂有重物 的缆绳支撑。距离 大于距离 。求系统的所有可能平衡位置,并研究它们的稳定性。
答案
,