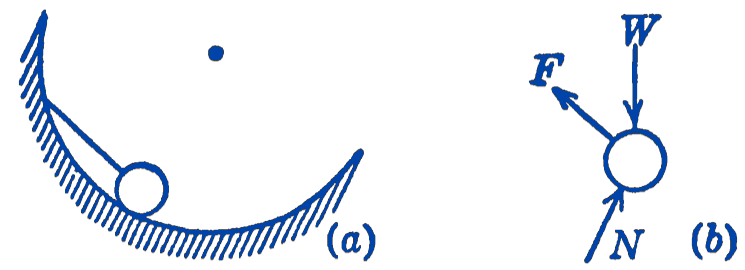
静力学 受约束质点的虚位移原理 在许多情况下,所讨论的质点不会是完全自由的,而是会受到各种连接的约束,以某种特定的方式运动。例如,质点可能是一个沿着导线滑动的珠子,在这种情况下,几何约束就是要求质点必须沿着导线运动。在另一种情况下,质点可能被要求保持在某个特定的曲面上,如图 1a 所示。在所有这些情况下,约束的作用是在问题中引入一个反作用力来强制执行该约束。 图 1b 示出了质点的受力图。在这种情况下,主动力被假定为无摩擦接触情况下的重力。这种对应于无摩擦接触表面的法向约束被称为理想约束,在接下来的内容中,我们将把讨论限制在这种理想约束上。 图 1 对于受约束的质点,有必要对我们关于虚位移的定义进行一些修改,因为很明显,某些位移(例如垂直于约束表面的位移)是不可能的。在这种情况下,虚位移不能是任意的位移,而必须限制在约束所允许的位移内。因此,我们将虚位移定义为质点与约束相容的微元位移。因此,“虚”这个词获得了“可能”的含义,因为它代表了与系统几何结构一致的所有微元位移。可以看出,这种更一般的虚位移定义将自由质点的定义作为一个特例包含在内。 表示虚位移原理的方程现在可以写成如下形式,其中我们将力分为两类:主动力 𝐅 和理想约束反力 𝐅 r : ∑ [ ( F x + F x r ) δ x + ( F y + F y r ) δ y + ( F z + F z r ) δ z ] = 0 在我们对虚位移的新定义下,该方程仍将表示平衡条件。例如,在约束表面的情况下,这种虚位移将位于与该表面相切的平面内。然后,我们的方程将禁止该平面内的任何合力,而约束本身则确保垂直于该平面的力相互平衡。 接下来,我们将上述方程写成以下形式: ∑ ( F x δ x + F y δ y + F z δ z ) + ∑ ( F x r δ x + F y r δ y + F z r δ z ) = 0 并且我们注意到,包含约束反力 F x r 等的项群将会消失,因为在所有情况下,力都将垂直于位移,因此不做功。这总是成立的,因为理想约束反力垂直于约束表面,而虚位移平行于约束表面。因此,我们的方程变为: ∑ ( F x δ x + F y δ y + F z δ z ) = 0 其中 F x , F y 和 F z 是系统的主动力。 因此,我们可以将受约束质点的虚位移原理表述为:在系统发生与约束相容的任何任意位移期间,系统主动力所做的功等于零。