力学系统的隔离——受力图
从前面的讨论可以看出,处理给定力系的方法是相对直接的。然而,工程师或物理学家面临的问题通常是以某种物理情境的形式出现的,因此第一步是确定能够正确表示该物理情境的力系。将静力学原理应用于力系往往可以简化为常规步骤。一个更困难的问题是决定在一个特定的系统中应该包括哪些力,以达到预期的结果。除非问题中包含了与给定物理情境等效的力,否则仅仅熟练操作力系不足以解决物理问题。另一方面,一旦建立了真实的受力图,实际上总能通过常规方法获得解答,这些方法虽然可能涉及繁重的工作,但通常不需要太多的创造力。从物理情境过渡到对所涉及力的陈述,是解决问题的重要第一步。
虽然识别必须包括的力所涉及的步骤对于所有问题并不完全相同,但有一些可以遵循的一般原则。最重要的原则是,必须始终将正在研究的特定力学系统与宇宙的其余部分区分开来。为了解决特定问题而将宇宙的某一特定部分隔离出来的过程,是力学中的核心概念之一。
为了正确地隔离一个力学系统,必须明确区分系统外部的力和系统内部的力。外力是系统外部的物体作用于系统或系统某一部分的力。内力是同一系统的某一部分作用于该系统另一部分的力。当然,一个特定的力对于一个系统来说可能是内力,而对于另一个系统来说同时可能是外力。
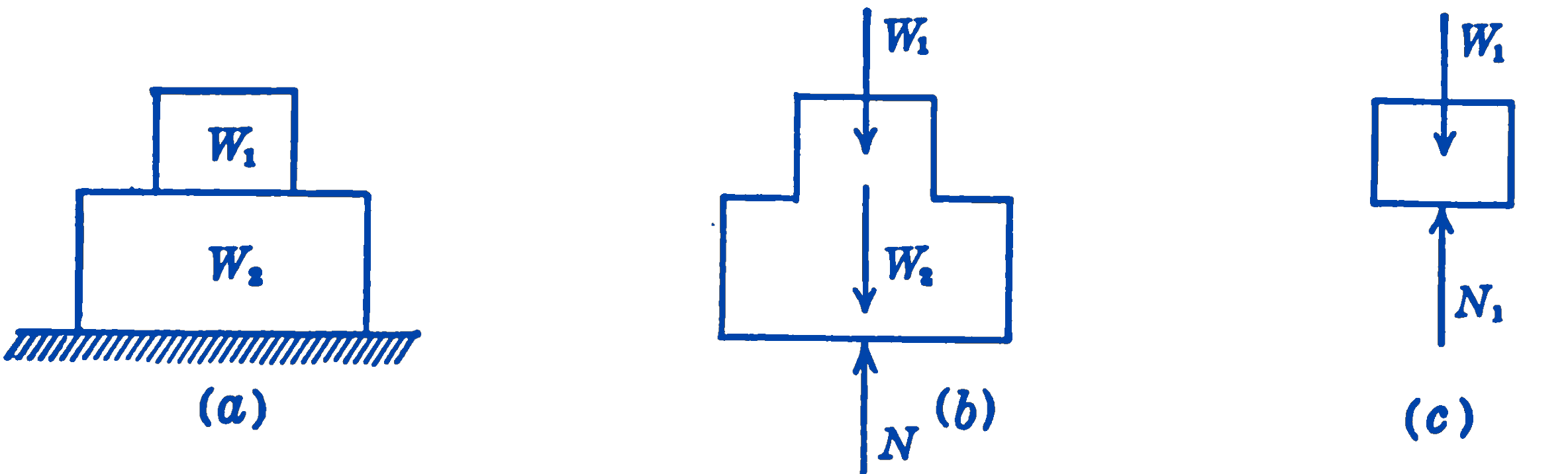
考虑如图 1a 所示的两个重为 和 的物块。在图 1b 中,这两个物块被共同视为要隔离的力学系统,并绘制了一幅显示作用在该系统上的所有外力的图。这种图被称为受力图。
绘制受力图应该是解决每个力学问题的第一步。
受力图的目的是指出作为力学系统隔离出来的物理结构部分。作用在该系统上的外力是物块的重力 和 ,以及支撑面对系统施加的力 。两个物块之间的力在此系统中将是内力,因此不会出现在受力图中。
在图 1c 中,仅将上方的物块隔离为一个力学系统,并绘制了受力图。在此系统中,作用的外力是物块的重力 以及物块 作用在物块 上的力 。在这种情况下,就 (c) 中所示的系统而言,力 是外力,但就 (b) 中的系统而言,它是内力。
所选择隔离的系统不需要像图 1 的例子那样遵循相关元件的物理边界。受力图可以仅包含物体的一部分,如图 2 所示的情况。
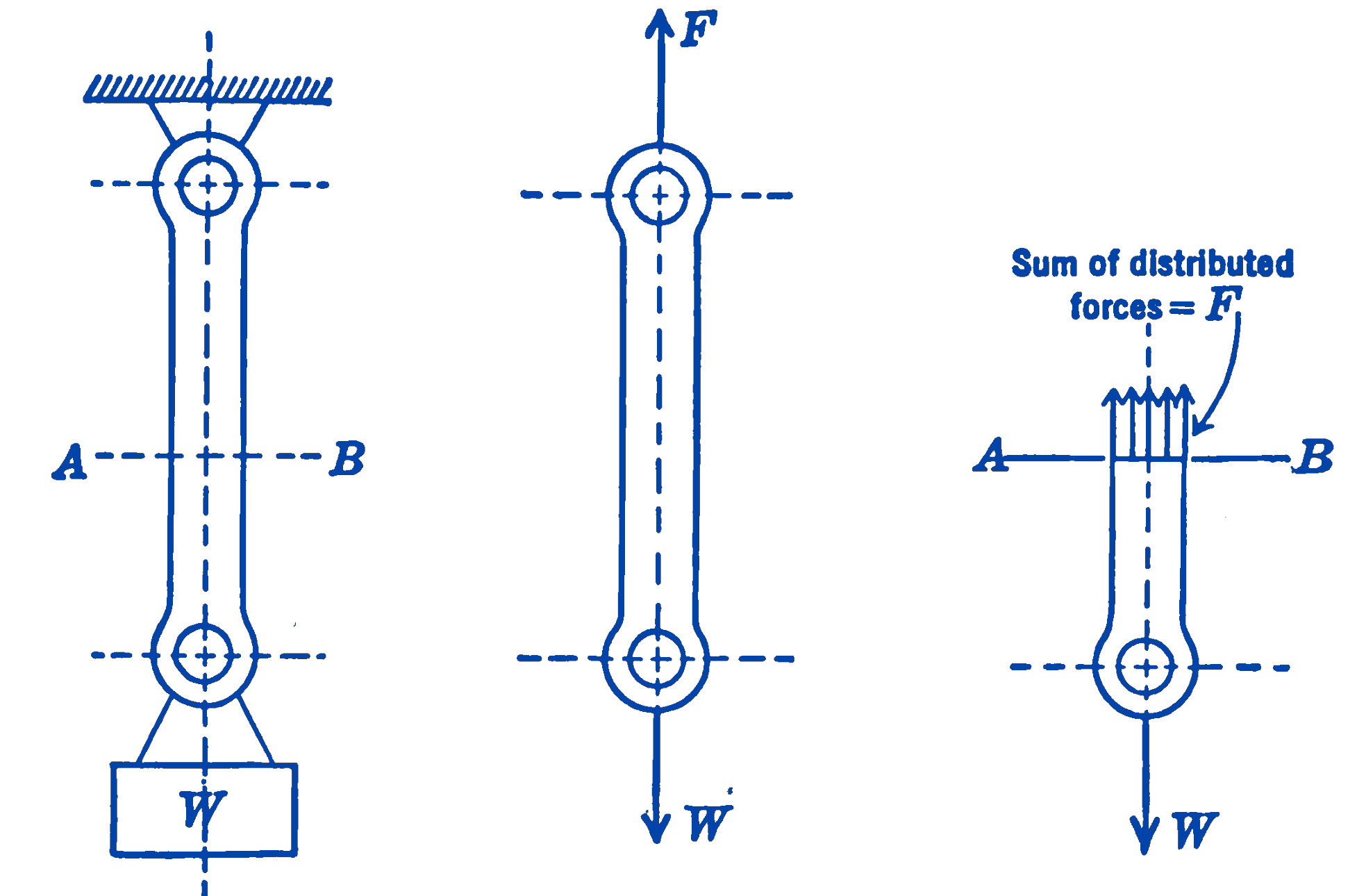
图 2b 是图 2a 所示拉杆的受力图。与重量 相比,拉杆的自重已被假定为可以忽略不计。在图 2c 中,我们设想拉杆在截面 处被切断,并绘制了拉杆下半部分的受力图。因此,上半部分的每个微元对下半部分对应微元施加的力,被表示为在杆件上截面上均匀分布的力系。在图 2b 中未出现的杆内内力,对于图 2c 所示的杆段来说是外力。显然,如果想要研究物体内部的内力,就必须进行这种虚构的切断。
关于受力图中究竟应该包含什么,无法给出一般性的回答,正是在这一点上,研究者的聪明才智必须展现出来。然而,待求的未知力必须作为外力出现在某个受力图中。对于任何类型的力系,可以列出的方程数量是有限的,因此可以确定的未知力数量也是有限的。人们经常会发现,将所需力显示为外力的受力图会涉及太多的未知力,以至于无法求解。在这种情况下,可能需要通过考虑其他受力图来开始解决问题,从而可以确定其中的一些未知量。
特别重要的是,作用在系统上的所有外力都必须在受力图中表示出来。有时人们倾向于认为某些力(例如重力)是如此显而易见,以至于没有必要花时间把它们画在受力图上。这种做法迟早会不可避免地导致在考虑时遗漏这些力。每一个力,无论多么显而易见,都应该包含在受力图中,除非问题的假设或条件之一是该力等于零。即使在这种情况下,最好也包含该力,然后写明该力等于零,因为可能存在其他不能忽略该力的条件。
在考虑可能作用于物体的力时,应该注意,物体与另一个物体接触的任何点都是可能存在力的点。根据问题中给出的其他数据,可能可以确定该点处的力的方向。例如,作用在无摩擦支撑处的力的方向垂直于接触面。第二种容易找到方向的情况是仅在两个力作用下处于平衡状态的系统。因为只有当两个力大小相等、方向相反且作用在同一直线上时,它们才能处于平衡状态,所以它们的方向必须与连接其作用点的直线方向相同。这意味着,如果构件的重量可以忽略不计,那么作用在电缆和连杆等构件末端的力具有电缆或连杆的方向。还必须记住,物体之间在没有物理接触的情况下也可能存在力,例如重力、电磁力或静电力。
示例 1。
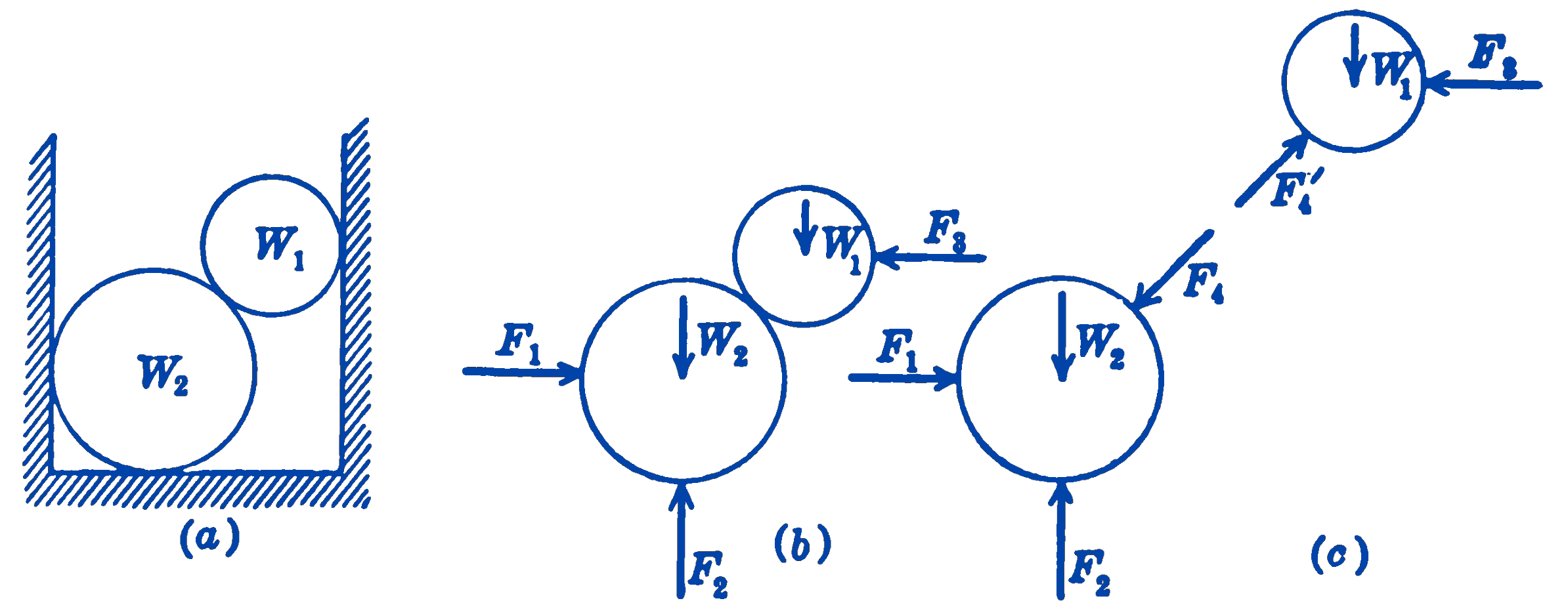
- 两个光滑的圆柱体(图 3)静止在一个光滑的槽中。
- 在 (b) 部分中显示了将两个圆柱体视为一个整体的受力图。由于所有表面都是无摩擦的,接触面之间的力垂直于表面。请注意,就由这两个圆柱体组成的系统而言,两个圆柱体之间的力是内力,因此这些力不会出现在受力图上。
- 在 (c) 部分中显示了两个圆柱体的两个受力图,每个圆柱体都被视为一个独立的力学系统。在这种情况下,将任意一个圆柱体单独作为受力图考虑时,另一个圆柱体施加的力就成为该系统中的外力。
示例 2。
- 如图 4a 所示,载荷 作用于一个刚性销接框架上。构件 的末端支撑在水平面上的无摩擦滚子上。构件的自重与作用的其他力相比很小,可以忽略不计。
- 在 (b) 中显示了整个结构的受力图。由于 处的滚子是无摩擦的,因此在 处作用于框架的力必须垂直于表面。在 处,销钉可以传递任何方向的力,因此该力的方向和大小都是未知的。因此,我们用两个未知的直角分量 和 来表示 处的力。
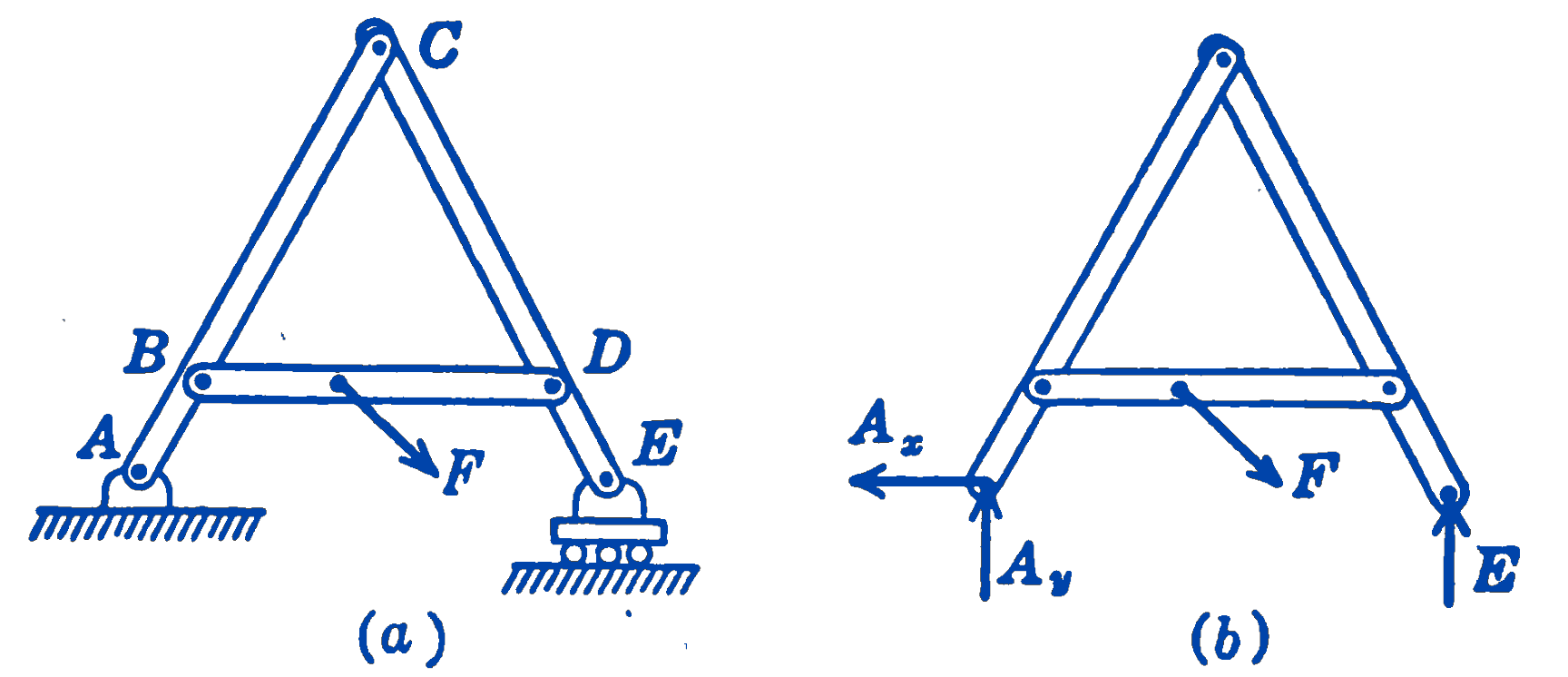
- 在 (c) 中显示了构成该结构的三个构件中每一个的受力图。在销钉连接处,力的方向和大小都是未知的,如力的两个未知直角分量所示。在上述 (b) 所示系统中属于内力的两个构件之间相互作用的力,就单个构件而言,现在是外力。这些力成对出现,大小相等且方向相反,因此在 (b) 中相互抵消。
示例 3。
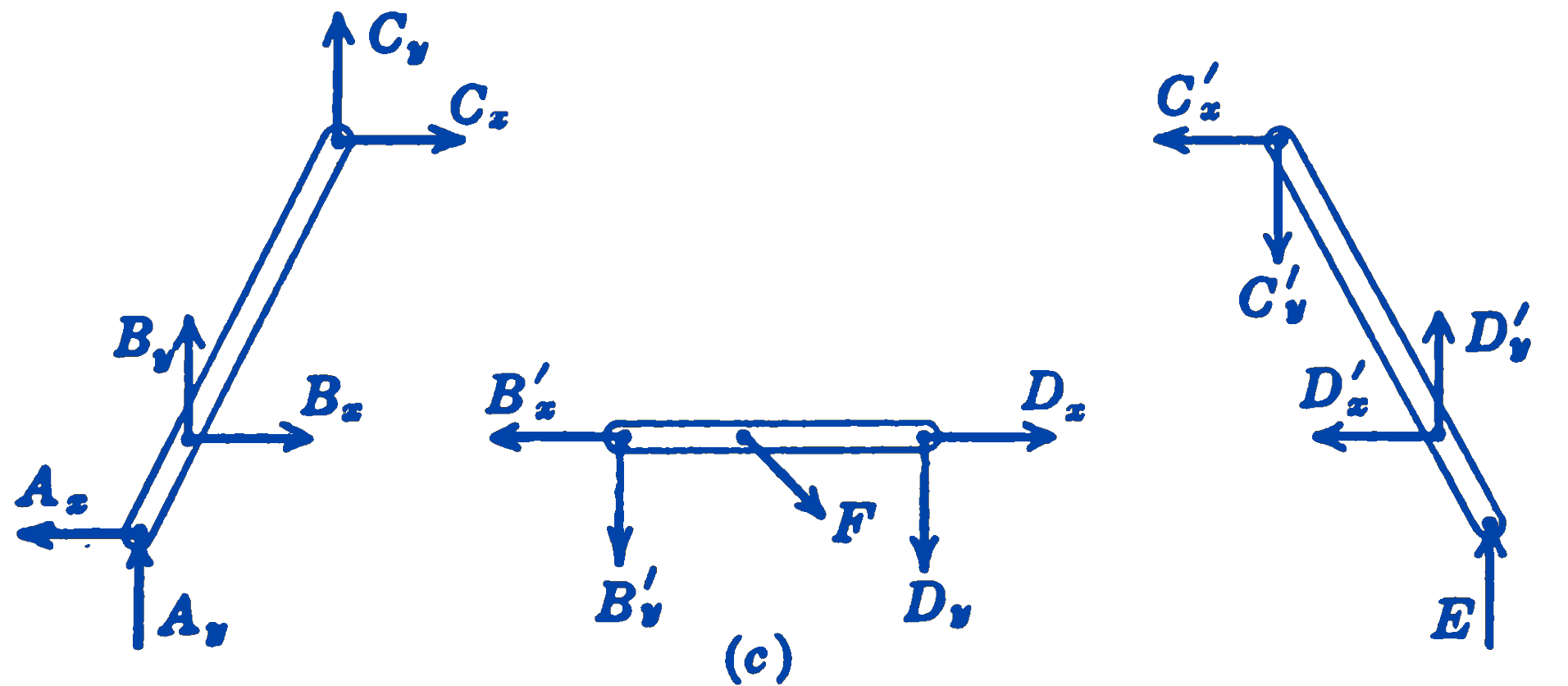
- 在图 5a 中显示了一个简单带式制动器的基本元件。制动鼓顺时针旋转,力 将制动带拉紧在制动鼓上,从而随着力 将制动带拉紧在制动鼓上,在制动带和制动鼓之间提供增加的摩擦力,从而形成所谓的自增力制动系统。
- 在 (b) 中显示了由角度 所对的制动带部分的受力图。其重量与作用的其他力相比很小,因此忽略不计。如果假设制动带是完全柔性的,即不能承受弯曲,则力 和 将如图所示切向于制动鼓。制动鼓和制动带之间的摩擦力表示为切向于制动鼓的均匀分布力系,而制动鼓 and 制动带之间的反作用力表示为均匀分布的法向力系。
- 在此图中显示了由无穷小角度 所对的制动带部分的受力图。均匀分布的摩擦力已被其合力 代替,均匀分布的法向力已被其合力 代替。
示例 4。
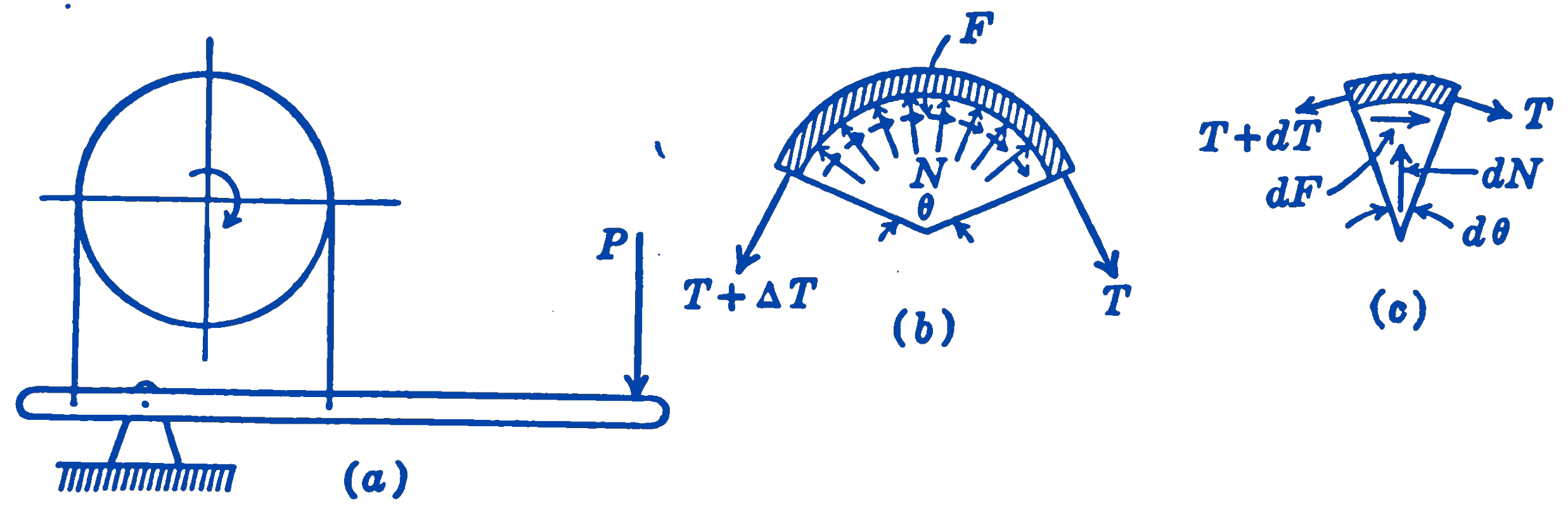
- 图 6a 显示了一根支撑在两点上并承受垂直力 载荷的梁,其方式是在垂直平面内引起弯曲。
- 在 (b) 中显示了截面 右侧那部分梁的受力图。右侧支撑施加在梁上的垂直力表示为 。截面 右侧梁部分的重量 被表示为作用在该元件的重心上。我们设想已被移除的左侧截面对该梁段施加的力表示为两个力系:由于梁弯曲引起的水平力系,以及由于剪切作用引起的垂直力系。这两个力系都不是均匀分布的。正如我们稍后通过分析问题所发现的那样,弯曲力在梁的下边缘为拉力,在梁的上边缘为压力,并在某个中间截面处穿过零。剪切力在梁的顶边缘和底边缘为零,并在某个中间位置达到最大值。我们在目前的受力图中所做的只是指出存在大小和分布未知的力。如果不进行进一步分析,就无法确定图中所示力的具体形式。
示例 5。
- 图 7a 显示了承受内压 的厚壁管截面。
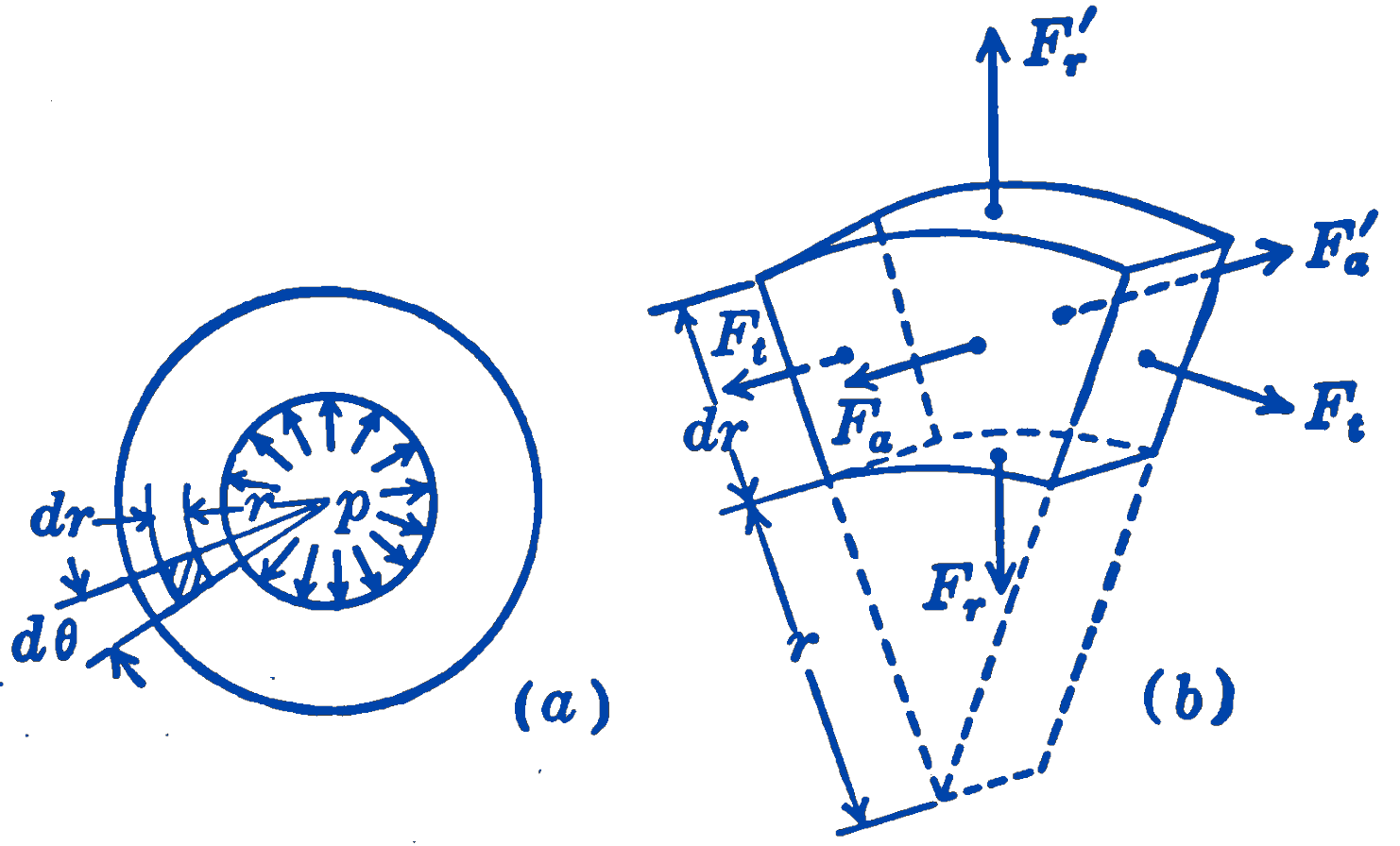
- 图 7b 显示了 (a) 中阴影所示的极小微元体的受力图。该微元的全部六个面都受到力的作用,这些力可以被认为均匀分布在各面的无穷小面积上。这些均匀分布的力已被其合力代替,合力作用在微元各面的形心上。微元的重量已被假定为与作用在系统上的其他力相比非常小。
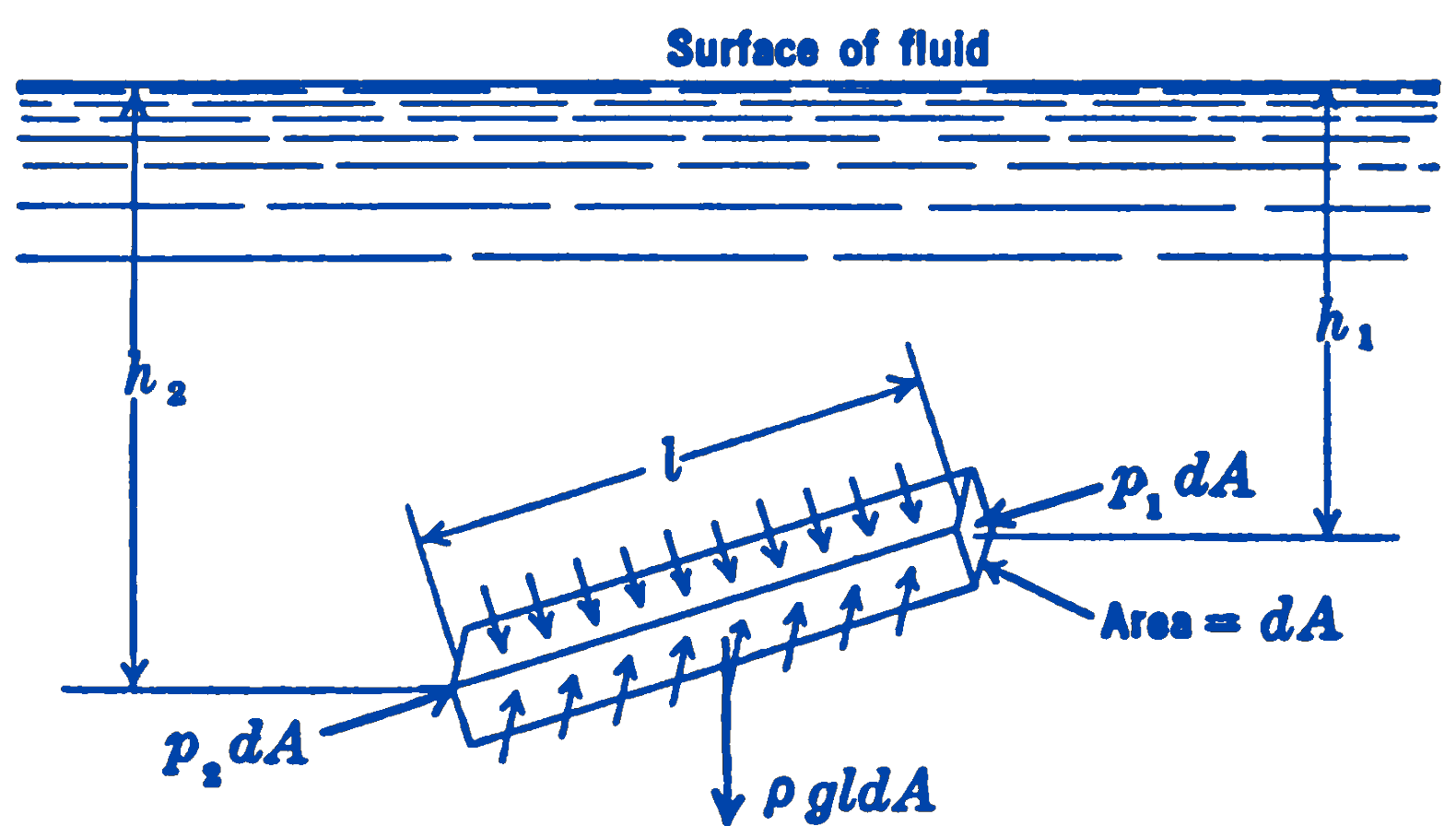
示例 6。图 8 显示了位于流体表面下方一定距离处的流体矩形棱柱体的受力图。该棱柱体的无穷小横截面积为 ,棱柱体的长度为 。在棱柱体的每个面上,作用的力将等于压力乘以面积。重力将是棱柱体的体积乘以比重。
示例 7。
- 在图 9a 中显示了密立根测定电子电荷的油滴实验的基本元件。重为 的油滴显示在强度为 的电场中。
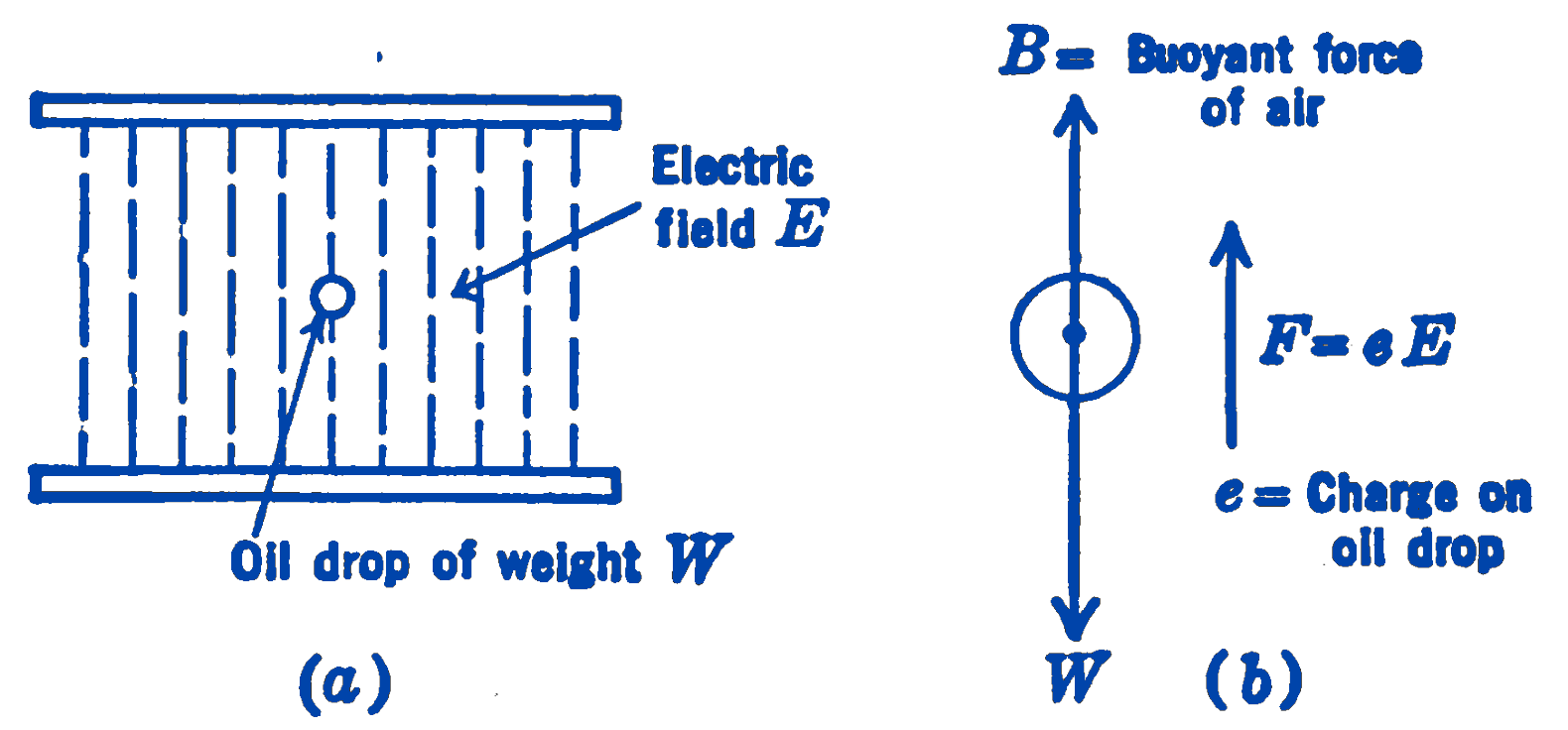
- 显示了油滴的受力图 (b)。该油滴在空气浮力、重力以及由于电场中电荷存在而产生的力的作用下处于平衡状态。
在上面给出的所有示例中,作用在系统上的力都是平衡的,因此系统一直处于平衡状态。然而,受力图的用途并不仅限于静力学问题。在研究由不平衡力系引起运动的动力学问题中,清晰地了解作用在系统上的所有力是至关重要的。
以下是一些应用于动力学问题的受力图示例:
示例 8。
- 图 10a 显示了往复式内燃机一个气缸的示意图。
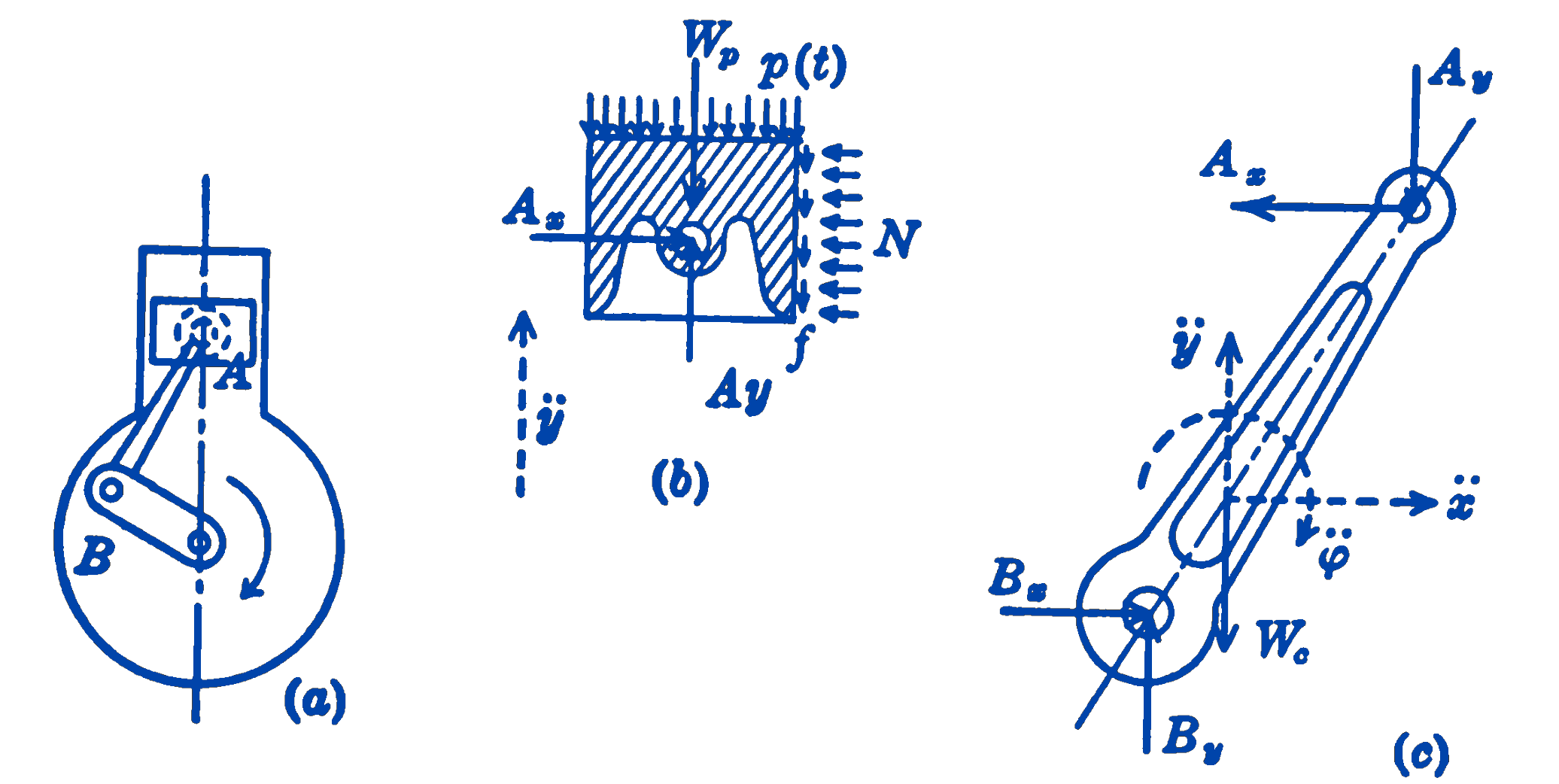
- 图 10b 是发动机活塞 的受力图。近似均匀分布在活塞顶部的力 是活塞上方油气混合物爆炸产生的气体压力。这些力随时间变化,因此表示为时间的函数。连杆 作用在活塞上的力的大小和方向都是未知的,因此在图中表示为两个直角分量 和 。气缸壁作用在活塞上的力近似表示为两个均匀分布的力系:法向力 和摩擦力 。虚线矢量表示活塞加速度的方向。活塞的重量 表示为作用在活塞的重心上。
- 在该图 (c) 中,显示了发动机连杆 的受力图。活塞在 处作用于连杆上的力表示为两个直角分量 和 。当然,这些力与上图 (b) 中连杆作用于活塞上的力大小相等、方向相反。曲轴作用于连杆下端的力表示为两个未知的直角分量 和 。连杆的自重 显示为作用在连杆的重心上。虚线向量表示重心在 方向上具有大小为 的加速度,在 方向上具有大小为 的加速度,以及大小为 的角加速度。
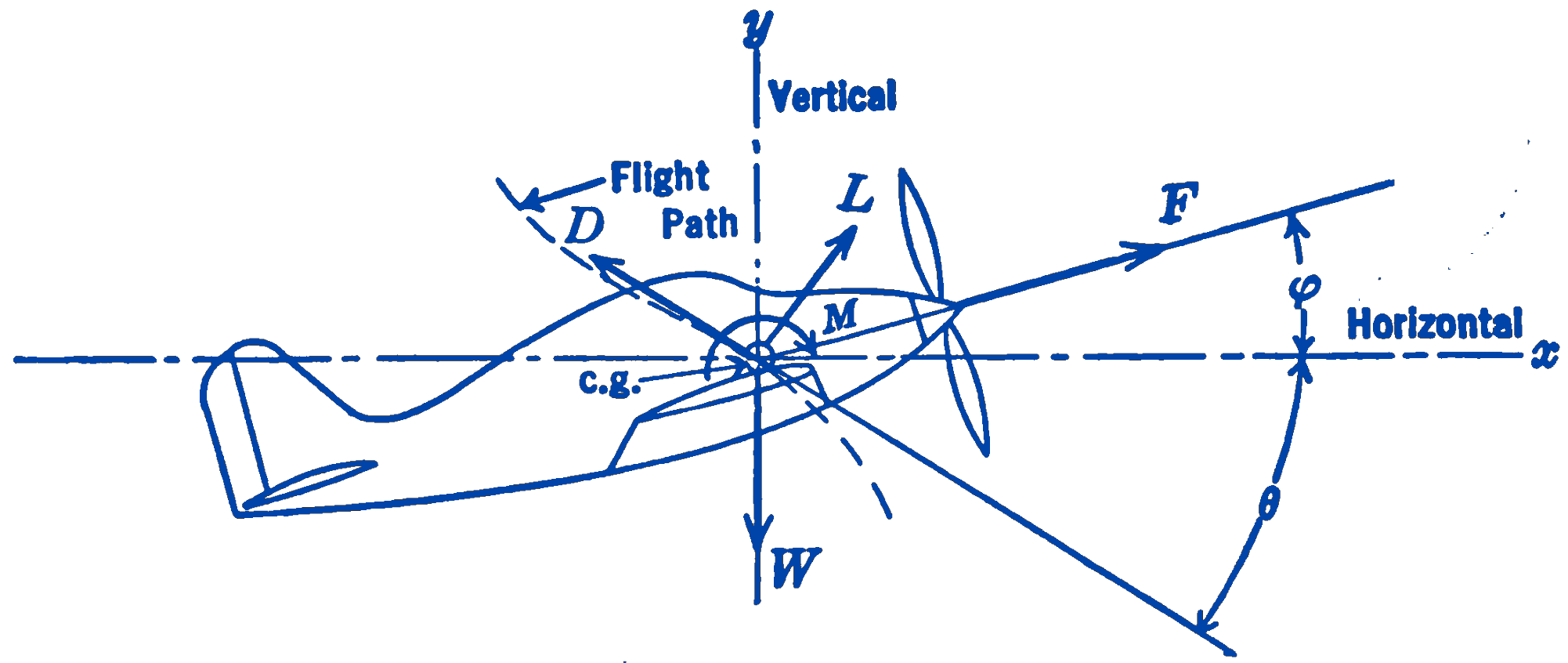
例 9. 图 11 显示了被视为刚体的飞机的受力图。如图所示,飞机的纵轴与水平方向成夹角 ,飞行路径与水平方向成夹角 。飞机的重量 显示为作用在飞机的重心上。存在一个垂直于飞行路径的升力 ,一个切于飞行路径的阻力 ,以及一个使飞机绕垂直于纸面的轴线俯仰的力矩 。力 为螺旋桨推力。
1.14.1 习题
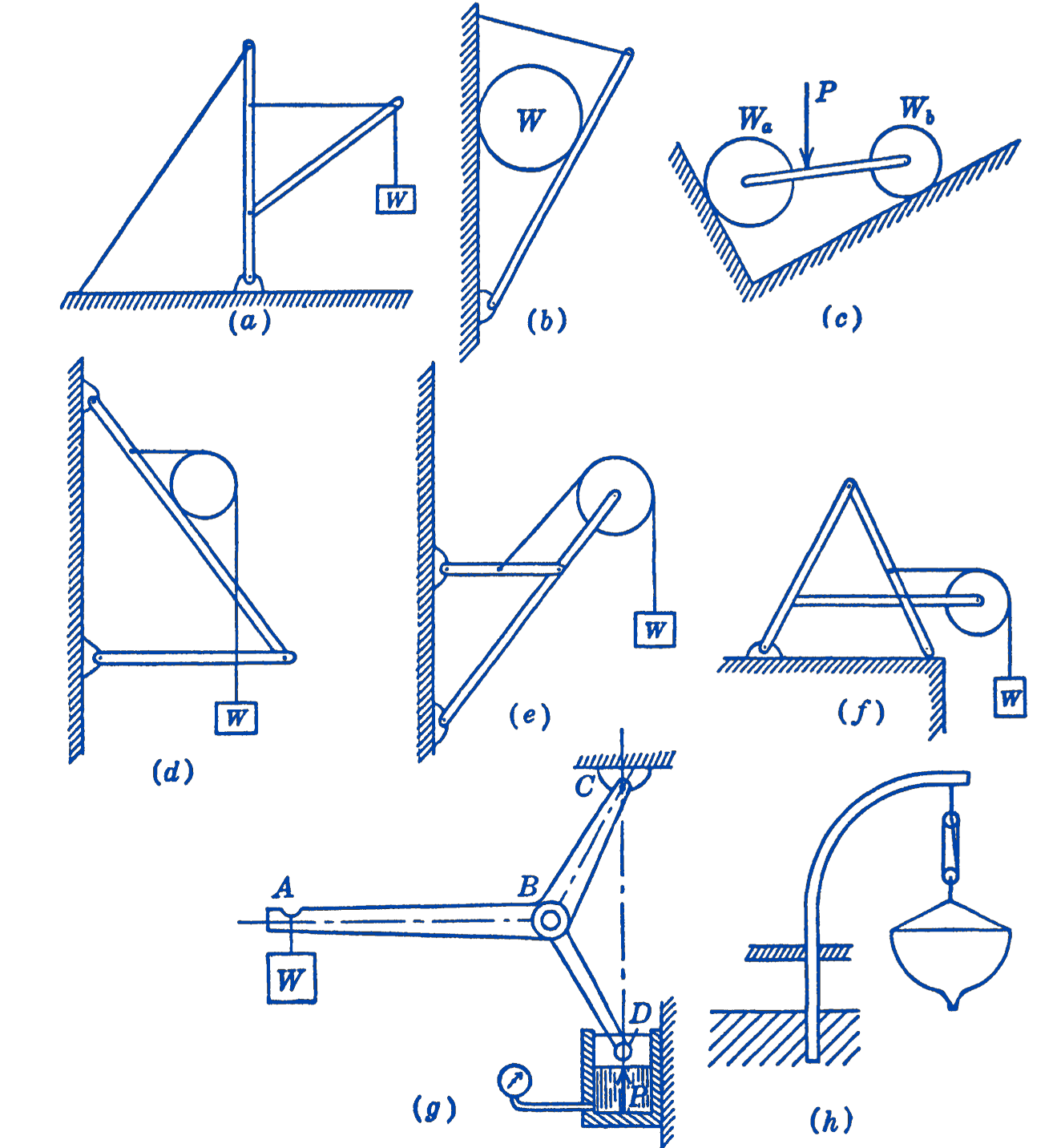
1. 对于以下每个结构,画出完整结构以及该结构中每个构件的受力图。