一般力系的合力
现在可以开发一种通用的解析方法来确定任意三维力系的合力。该方法包括将力系中的每个力替换为通过特定点的等效力和一个力偶。然后可以很容易地将这些力和力偶相加,从而得到整个力系的合力和合力偶。该方法如图 1 所示,为了简单起见,图中仅显示了两个力。然而,该方法适用于任意数量的力。
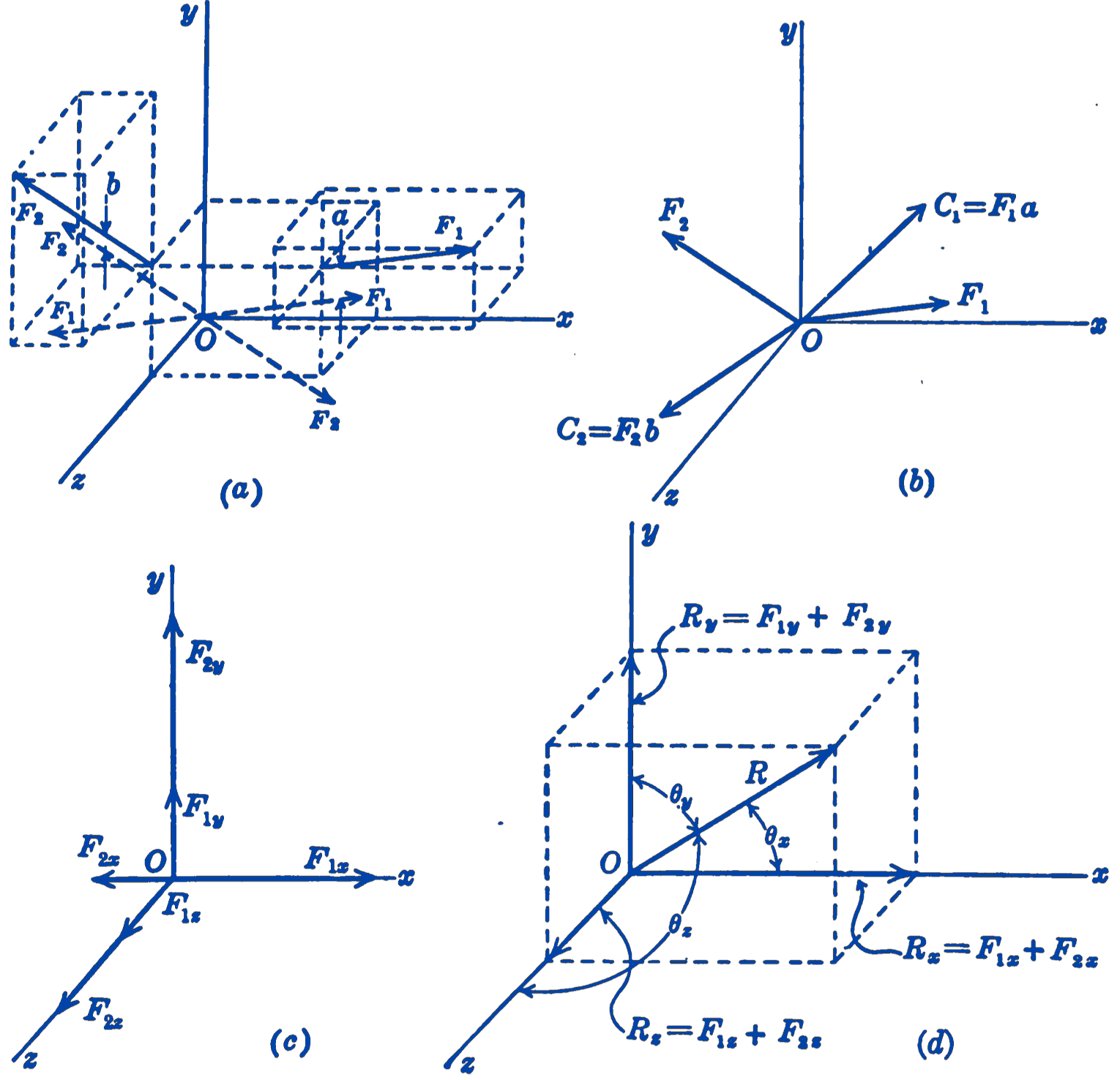
在图 1a 中,给出了两个一般的力 和 ,问题是确定它们的合力。我们将每个力分解为通过直角坐标系原点的平行力和一个力偶 ,从而将该力系简化为一组共点力和力偶,如图 (b) 所示。每个共点力都可以分解为沿三个坐标轴的分量,如图 (c) 所示,这些直角分量的代数和将给出合力 的直角分量,然后可以如图 (d) 所示求得合力。力偶矢量可以以完全相同的方式相加,因此一般的力系可以简化为一个力和一个力偶,表示为: 其中 且 其中
在实际应用中,不需要像图 1 那样想象力已被分解为力和力偶。由于原点处的力将始终平行于其原始位置的对应力,因此原始力系中力的直角分量将与共点力系的直角坐标相同。在力偶的情况下,每个力偶中的一个力通过原点,因此对三个坐标轴的力矩为零。因此,每个原始力对其中一个坐标轴的力矩将等于力偶矢量沿该轴的分量。我们只需考虑给定位置的一般力系,并写出:
该方法将任何一般的三维力系简化为单个力和单个力偶。对于大多数问题,将此类力系简化到这一步就足够了。事实上,在大多数工程问题中,需要的是力和力偶沿坐标轴的分量,因此通常不需要计算合力和合力矩。一个力和力偶的系统总是可以分解为通过特定点的力和一个矢量与该力平行的力偶,即力偶矢量可以与力矢量平行。在这种情况下,力矢量作用的轴线被称为系统的中心轴。
沿着上述思路对力系进行的分析最早由路易·泊松(Louis Poisson,1777-1859)提出,并在他的两部主要著作《静力学原理》(Éléments de Statique,1803)和《刚体旋转新理论》(Nouvelle Théorie de la Rotation des Corps,1834)中进行了阐述。在这些著作中,除了对动力学做出的其他重要贡献外,他还发展了力偶和中心轴的理论,并首次将一般力系的求解系统化。
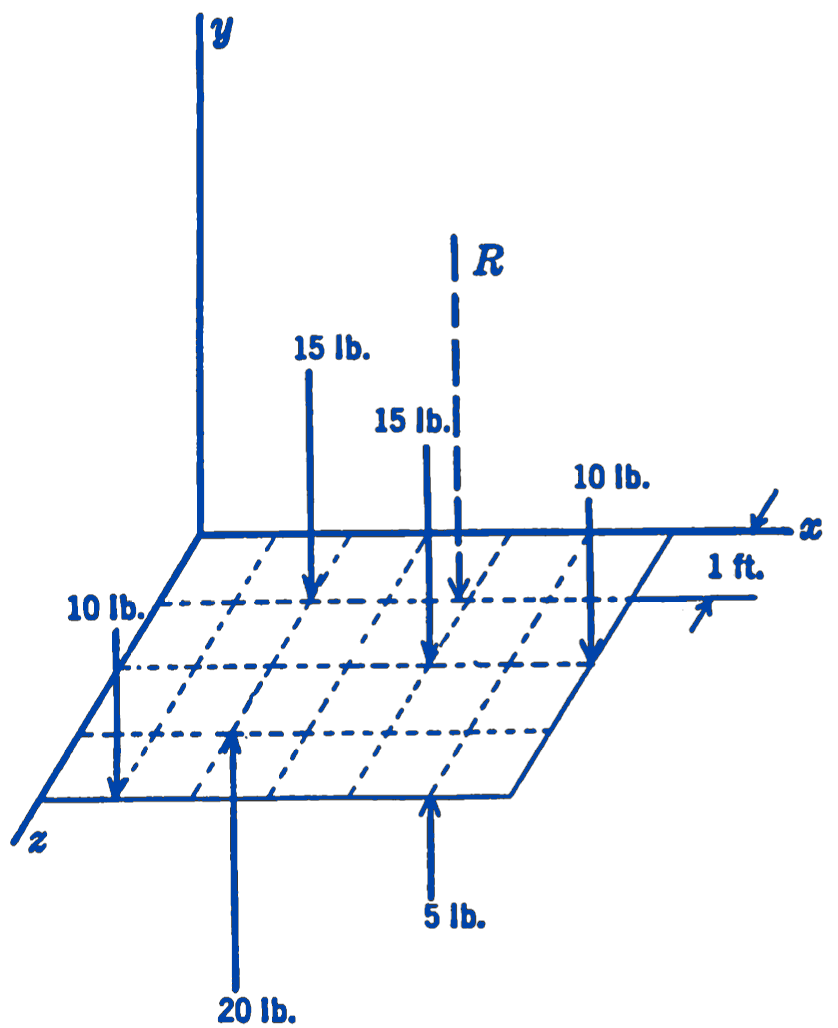
例 1 求图 2 所示力系的合力。
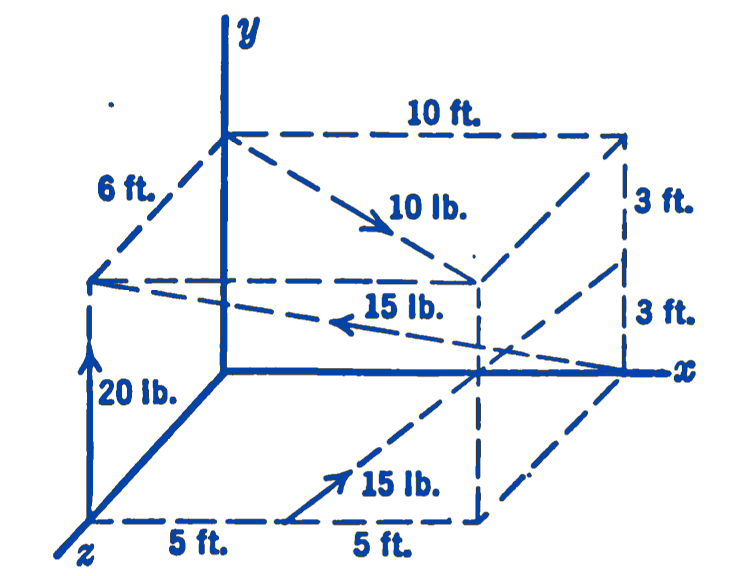
解:
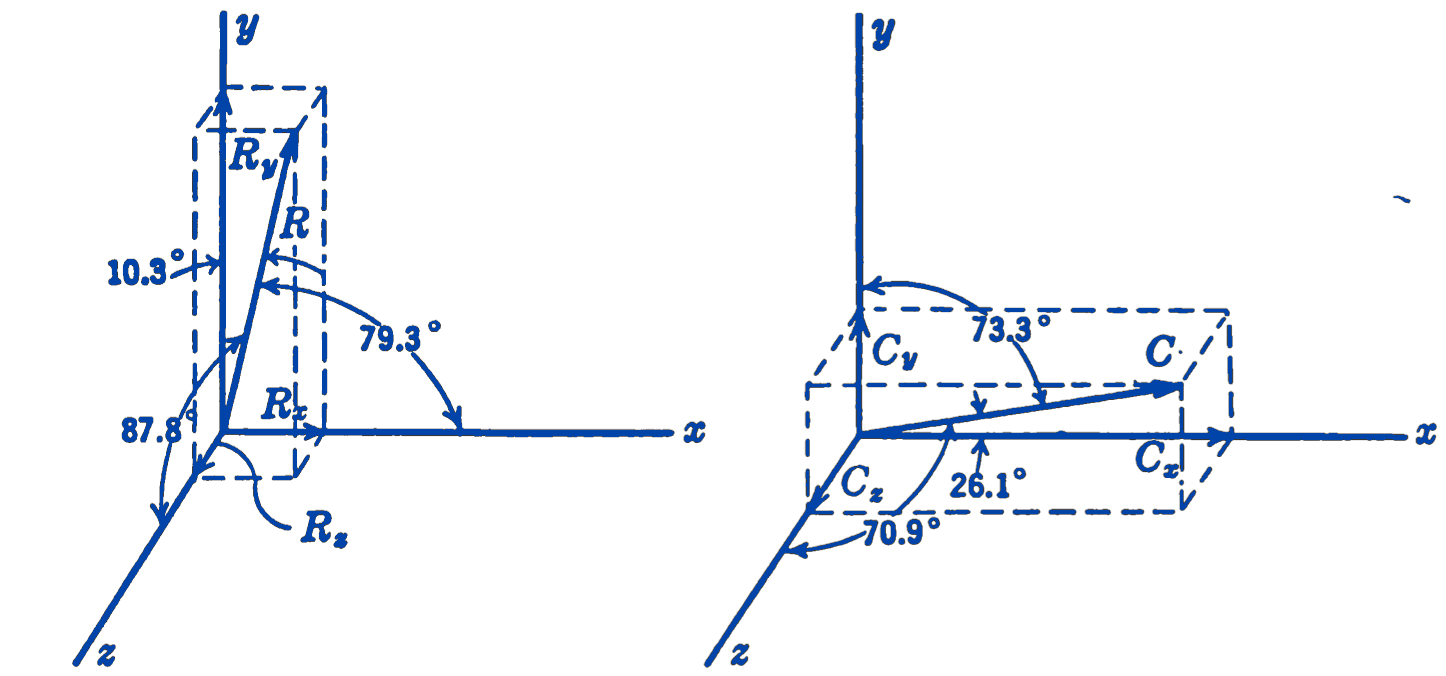
因此,合力为矢量:
如果需要,可以求出该矢量的模和方向:
合力和合力偶如图 3 所示。
例 2. 求图 4 所示平行力系的合力。
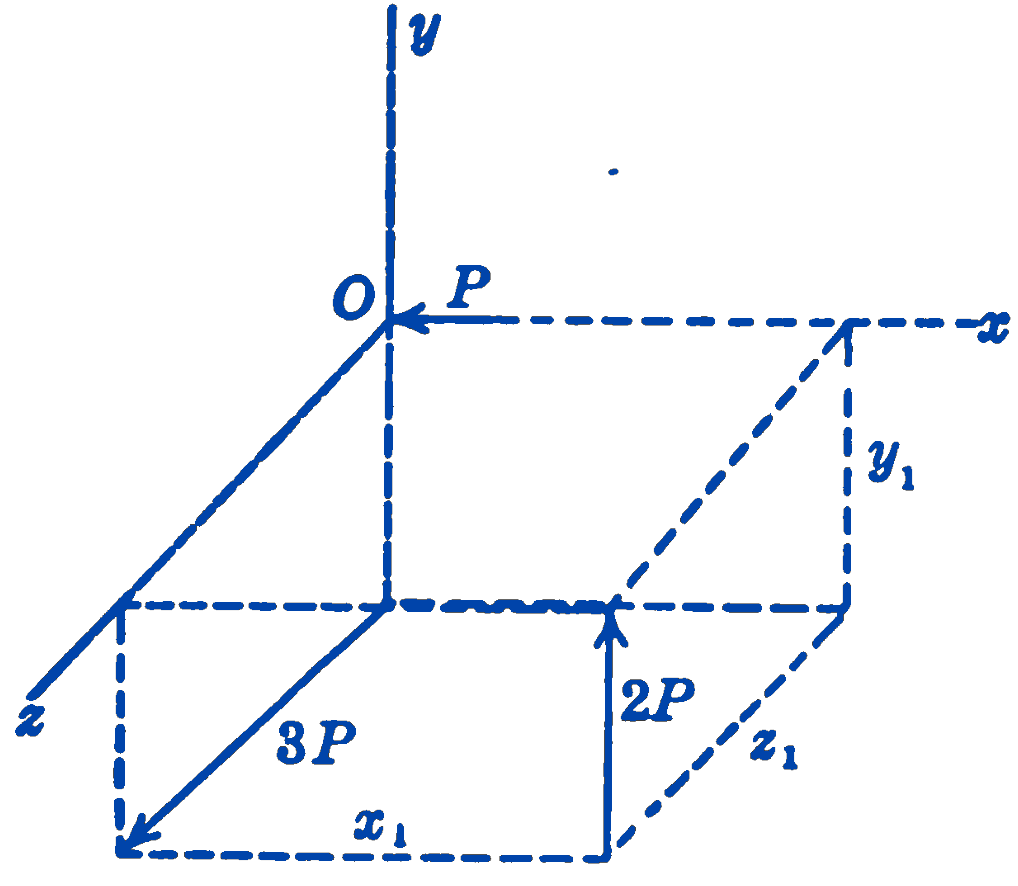
解:我们注意到,对于任何平行力系,合力偶的力都可以排列得与合力平行,因此合力偶和合力总是可以简化为单个力或单个力偶。因此,我们不将通用方法应用于此问题,而是直接利用力矩原理来寻找合力的位置: 合力到 轴的距离 可以通过对 轴取矩来求得:
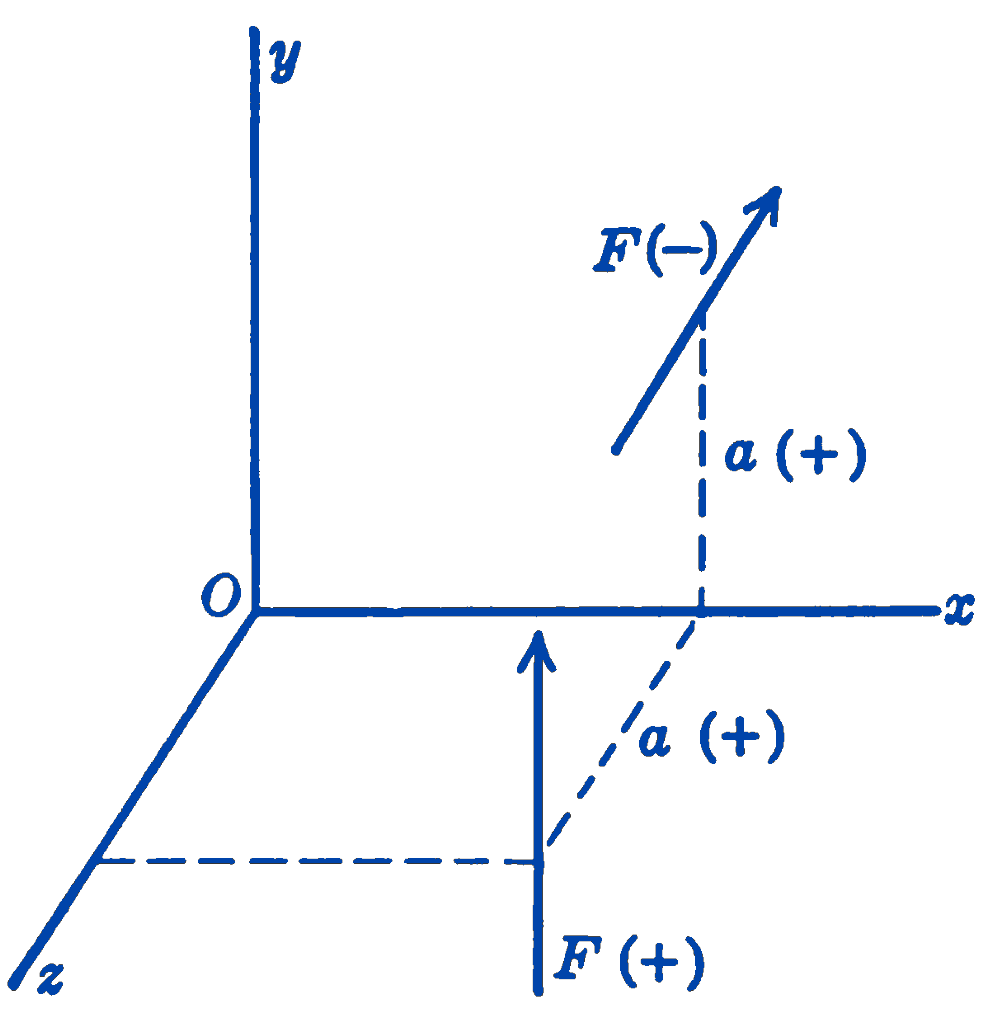
在图 5 中,可以看到两个力 ,它们对 轴的力矩方向相同。在每种情况下,从原点向 轴正端看去,力矩的方向都是逆时针的;因此,根据右手螺旋定则,力矩为负。对于平行于 轴的力,力为正,力臂为正,因此乘积为正。对于平行于 轴的力,力为负,力臂为正,因此乘积为负。由此可见,没有任何符号规定能使力的方向、力臂和力矩之间达到完全的一致性。使用矢量表示法可以消除这类困难。
1.13.1 习题
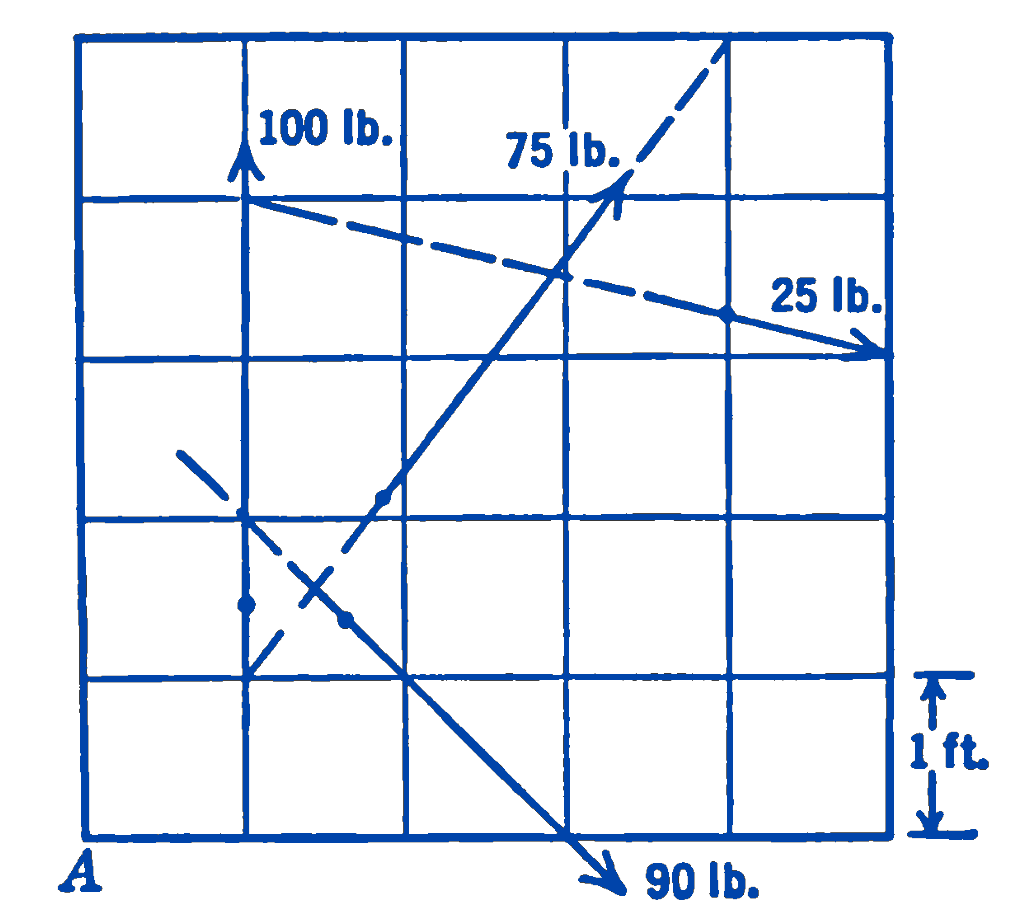
1. 如图所示,三个力作用在梁上。(a) 求该力系的合力。(b) 将该合力分解为作用在点 和 处的两个分力。
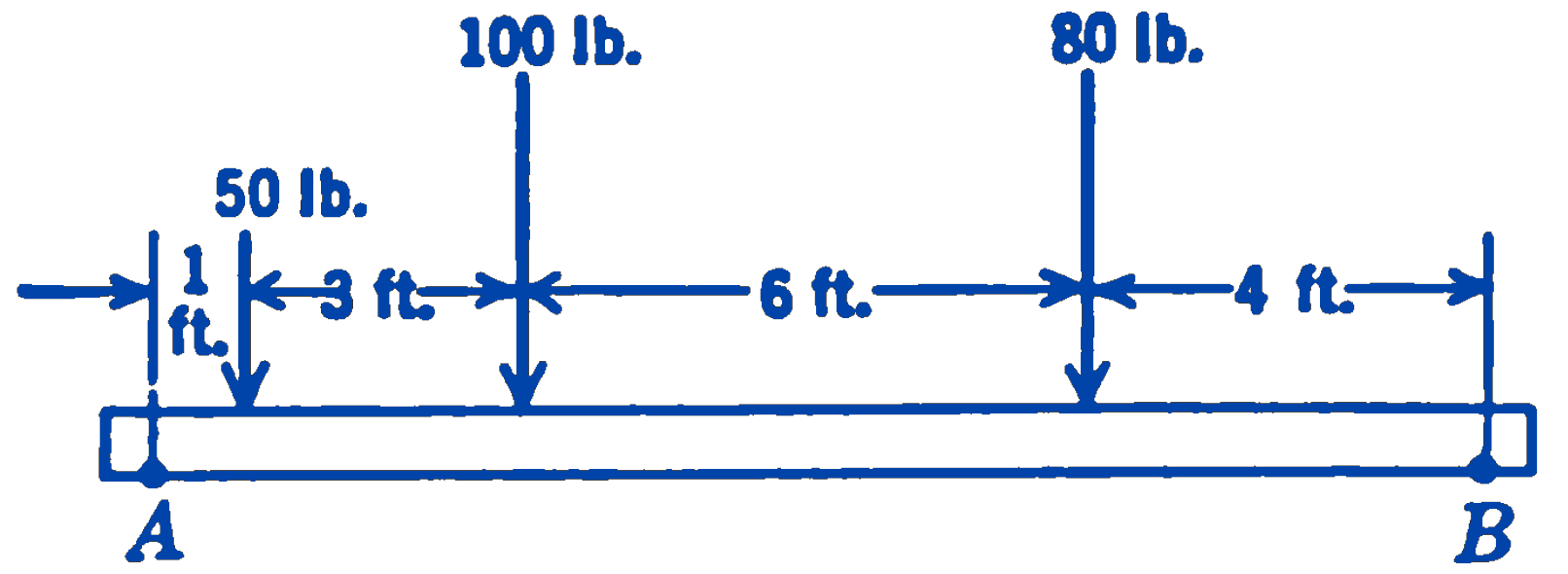
答案
230 磅; 磅, 磅
2. 平行于 y 轴的五个力与 平面相交于以下各点:
答案
180 磅;,
3. 一个 50 磅的力竖直向下作用,平行于 y 轴,并与 平面相交于点 ,。将该力分解为作用在点 ,;,;, 处的三个平行分力。
答案
-7.5 磅,20 磅,37.5 磅
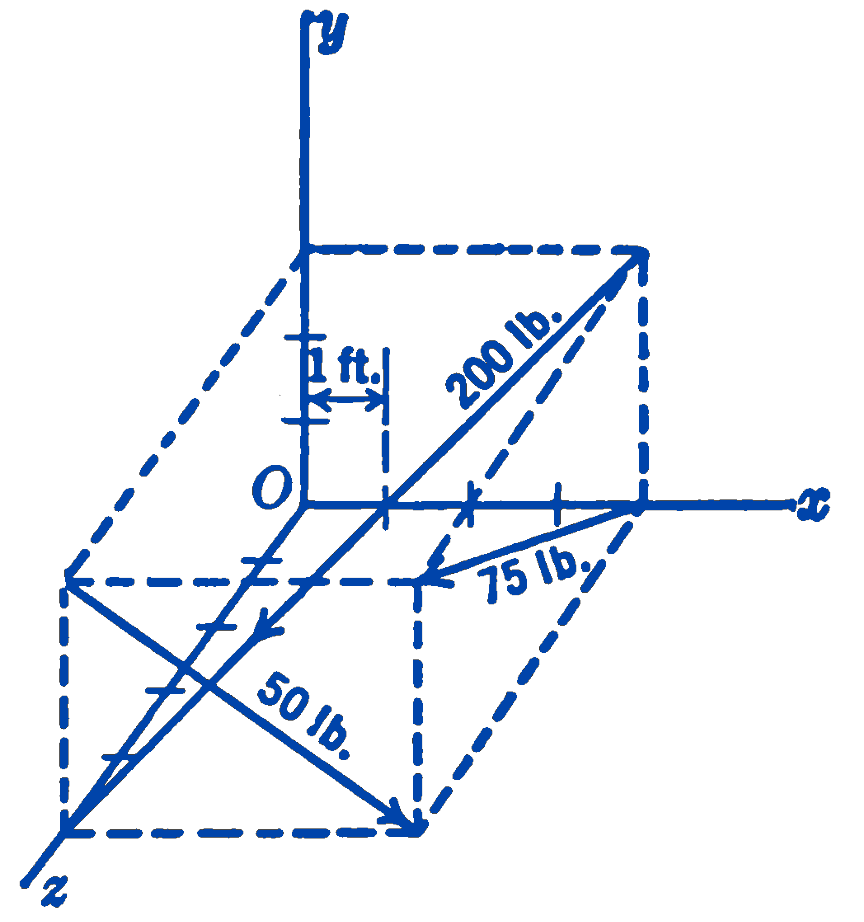
4. 求图中所示力系的合力。
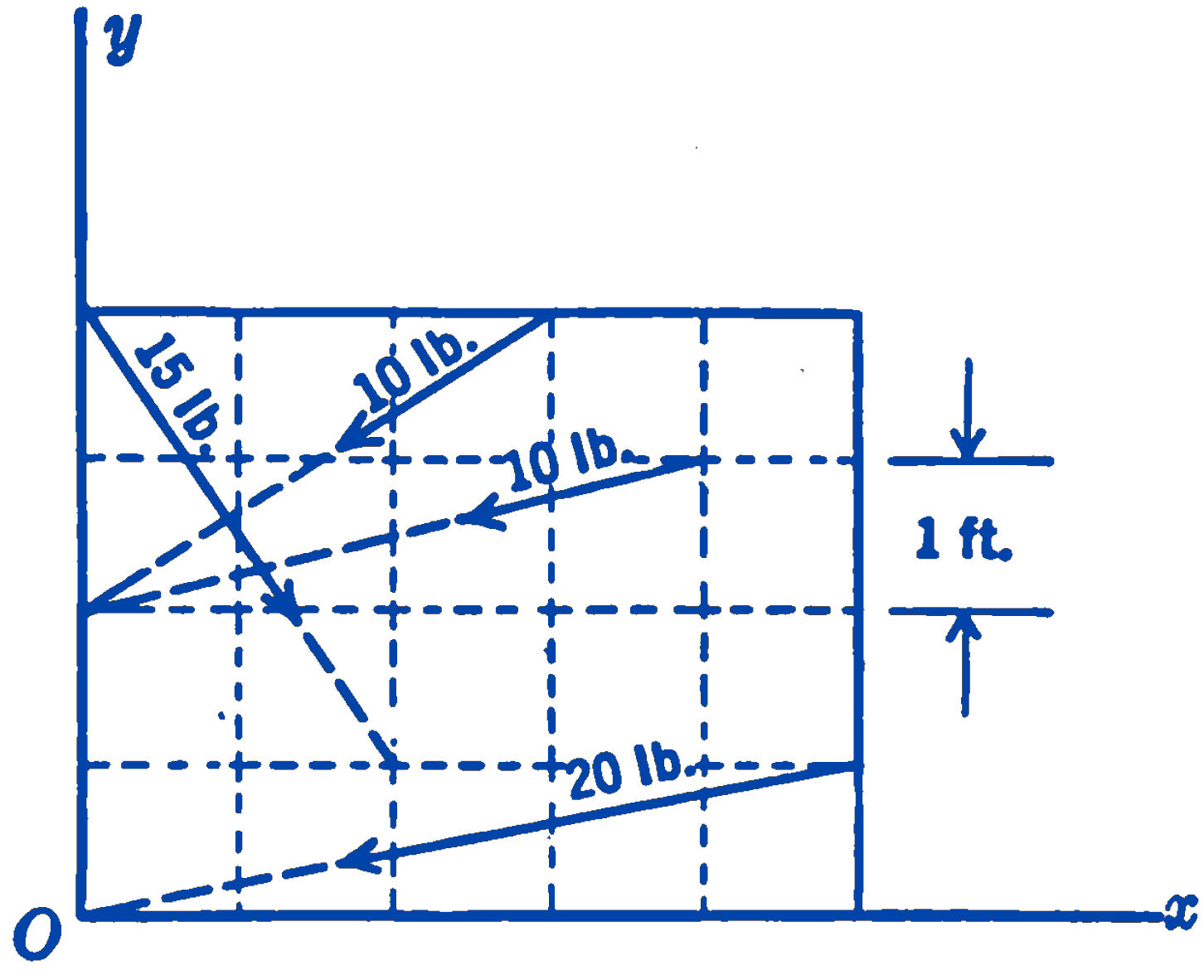
答案
力的大小 = 38.2 磅
5. 求图中所示三个共点力的合力。
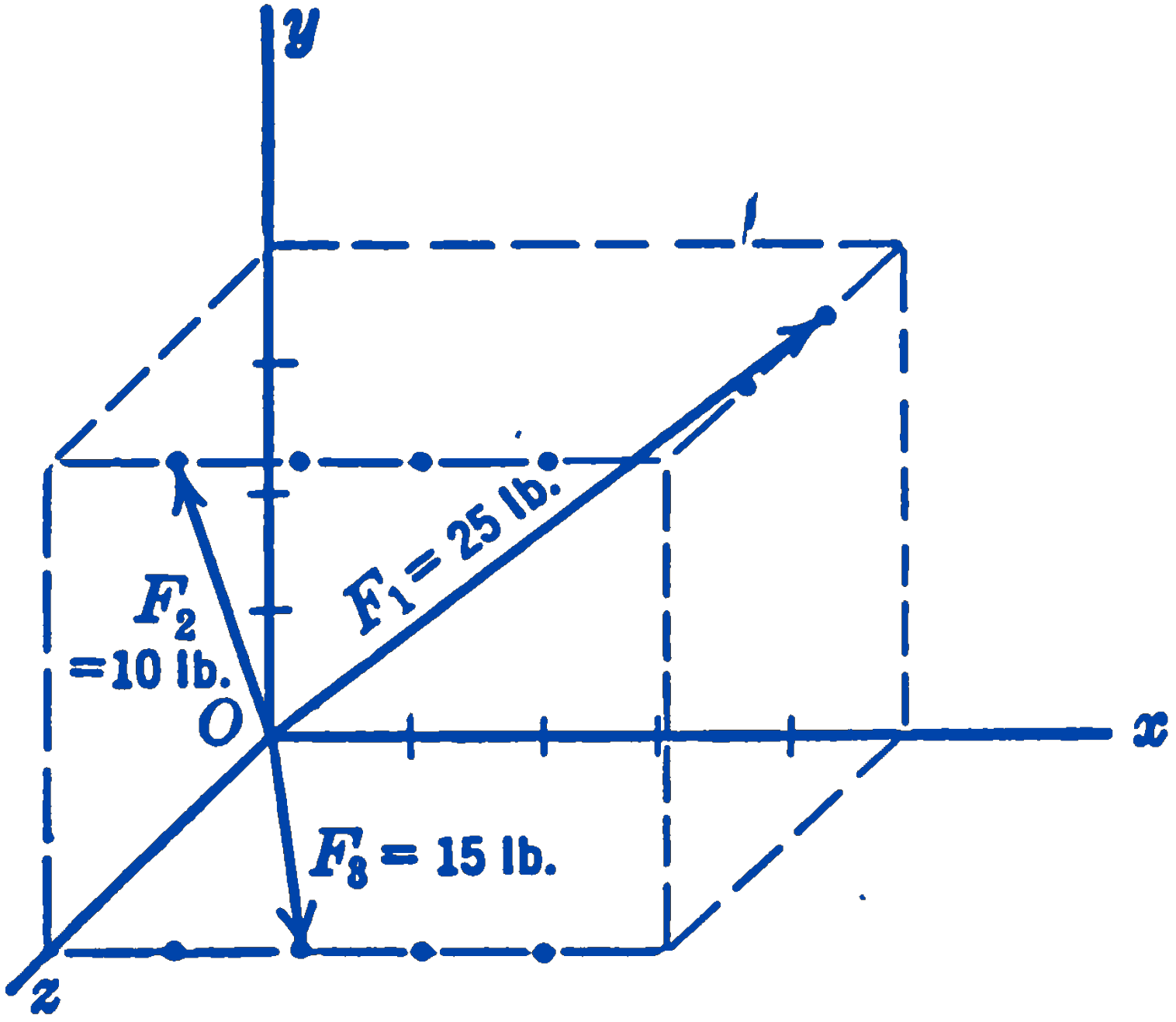
答案
6. 证明:任何共面的一般力系都可以简化为单个力或单个力偶。
7. 证明:一般非共面力系简化为单个力或单个力偶的条件为: 由此条件证明,一般平行力系或一般共面力系都可以简化为单个力或单个力偶。
8. 证明:一个力和一个力偶总是可以分解为一个力和一个矢量与该力平行的力偶。证明在这种情况下,力偶具有其最小可能的值。
9. 求图中所示力的合力。
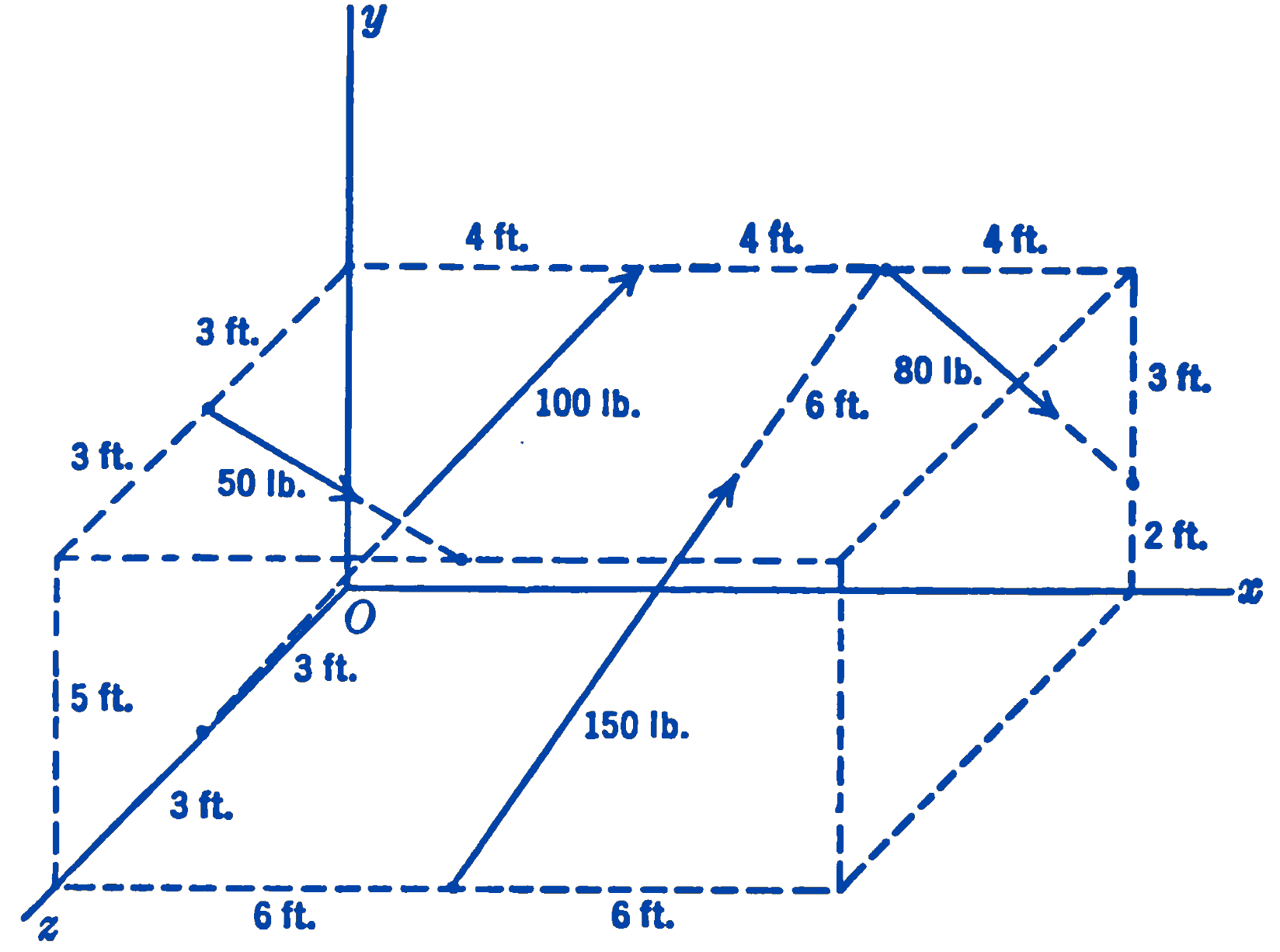
答案
;
10. 确定图中所示力的合力。求通过点 的单个力和一个力偶,使其共同等效于给定的力系。
答案
;
11. 将图中所示的三个力替换为通过原点的单个力和一个力偶。
答案
12. 图中所示的三个力分别为 、 和 。指出尺寸 、 和 之间的代数关系,使单个力可以等效于给定的力。