引言
从基本函数构建复杂函数
在微积分中,我们可以从基本函数构建更一般的函数。一种方法是相加,如 。另一种可能性是相乘,如 。第三种方法是组合函数,如 。函数复合是非交换的:。实际上,我们有 ,它与 完全不同。
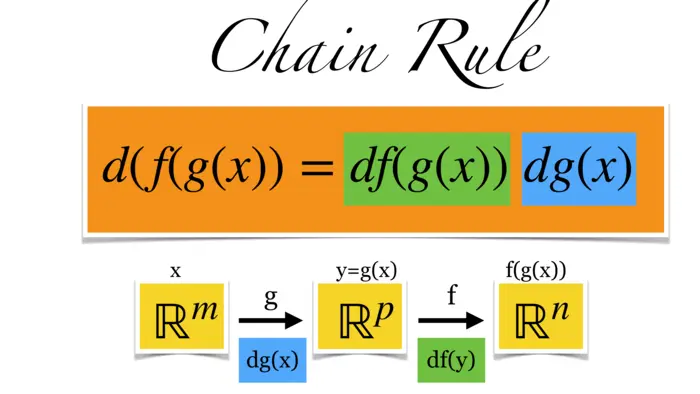 图 1. 和 可以组合为 。
图 1. 和 可以组合为 。 链式法则:从单变量到高维
我们如何用构成它的基本函数来表示复合函数的变化率?对于两个函数的和,我们有加法规则 ,对于乘法,我们有乘积规则 。我们通常简写为 或 ,并不总写出自变量。正如你从单变量微积分中所知,复合函数的导数由链式法则给出。这就是 。更详细地写出自变量,我们可以写 。我们将其推广到高维。我们直接写 而不是 。这就是我们所知的雅可比矩阵。现在,同样的规则成立:,这称为高维空间中的链式法则。在右边,我们有两个矩阵的乘积。
维度与链式法则
让我们看看这在维度上为什么合理: 且 ,那么 且 ,而 ,这与 属于同一类矩阵,因为 将 映射,所以也有 。链式法则 这个名字的由来是因为它处理的是链接在一起的函数。
讲座
多元链式法则
给定一个可微函数 ,它在 处的导数是雅可比矩阵 。如果 是另一个函数,其 ,我们可以将它们组合并形成 。矩阵 和 在一点处组合为矩阵乘积 。这个矩阵属于 。多元链式法则 是:
定理 1. 。
标量函数与梯度
对于 ,即单变量微积分的情况,我们有 和 。一般而言, 现在是一个矩阵而非一个数。通过检查单个矩阵元素,我们归约为情形 。在这种情况下, 是标量函数。而 是行向量,我们定义列向量 如果 是一条曲线,我们写 而不是 。符号 也读作 "nabla"。 特殊情况 是:
证明. 是当 时下面表达式的极限 在极限 下这就是(一维链式法则)的和 。
一般情况的证明: 令 。雅可比矩阵 的 元素是 。元素 的情形,令 且 ,便归约为当 是曲线且 是标量函数的情形。这就是我们已经证明过的情形。 ◻
示例
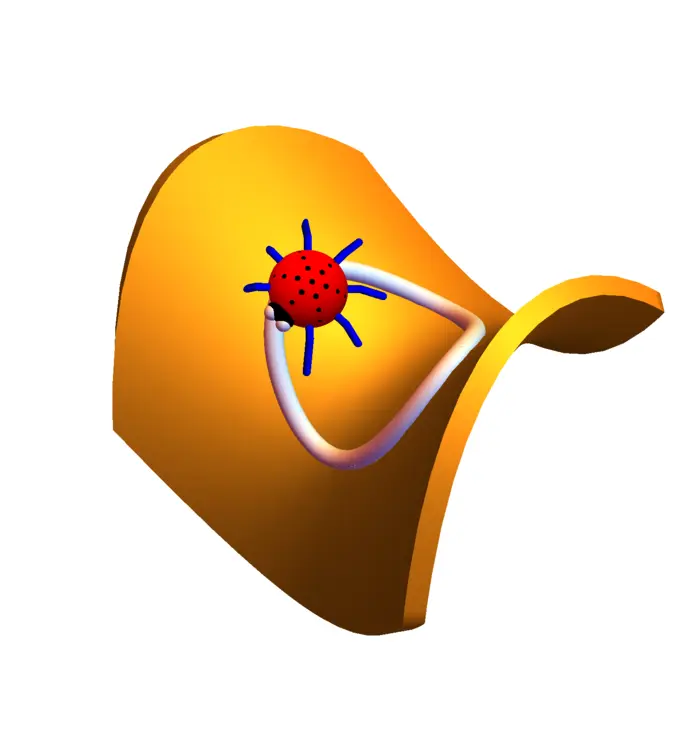
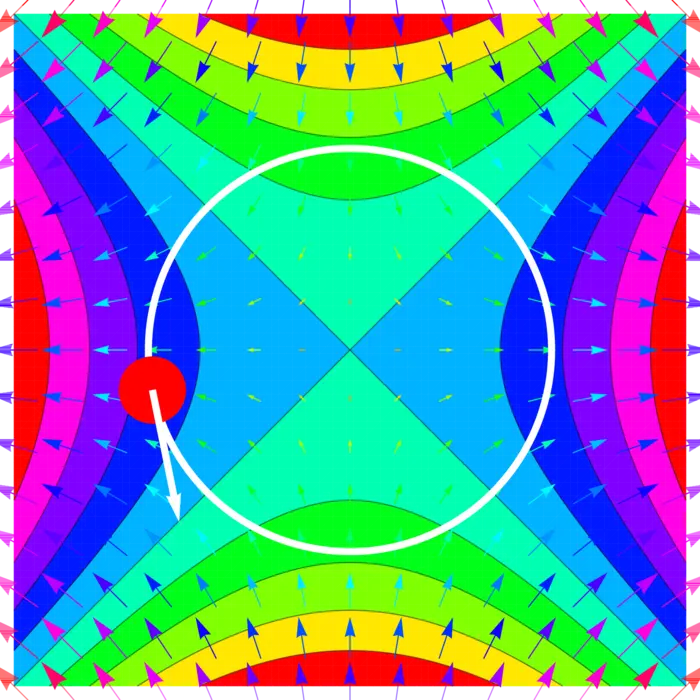
示例 1. 假设一只瓢虫在圆 上行走,且 是位置 处的温度,那么 是温度的变化率。我们可以写 现在,。 的梯度和速度分别是 现在
图解
势能与功率:链式法则的联系
情形 极其重要。链式法则 告诉我们,在位置 处势能 的变化率是力 在该点与运动速度的点积。右边是功率 力 乘以 速度。我们稍后将在曲线积分的基本定理中使用这一点。
通过导数看混沌:迭代映射中的李雅普诺夫指数与熵
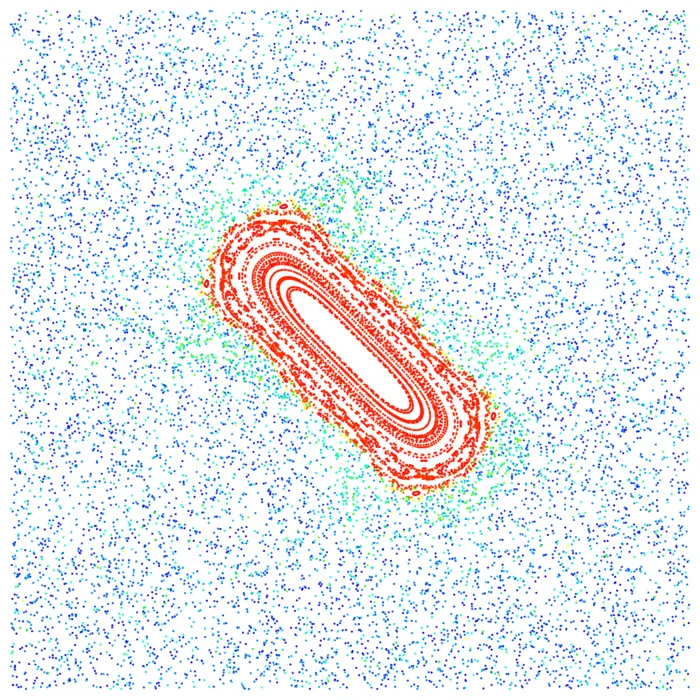
如果 ,那么 又是一个从 到 的映射。我们还可以迭代一个映射,如 导数 由链式法则等于雅可比矩阵的乘积 。数字 称为映射 在点 处的李雅普诺夫指数。它度量了混沌的程度,即 对初始条件的敏感依赖性。这些数字在数学上难以估计。即使对于像 Chirikov 映射这样的简单例子 人们也能测量到正熵 。Sinai 的一个猜想指出,对于大的 ,该映射的熵为正。测量表明这个熵 满足 。该猜想仍未解决。
哈密顿方程与能量守恒
如果 是一个称为哈密顿量的函数,且 ,那么 。这可以解释为能量守恒。我们看到哈密顿微分方程总是保持能量守恒。对于摆,,我们有 或 。
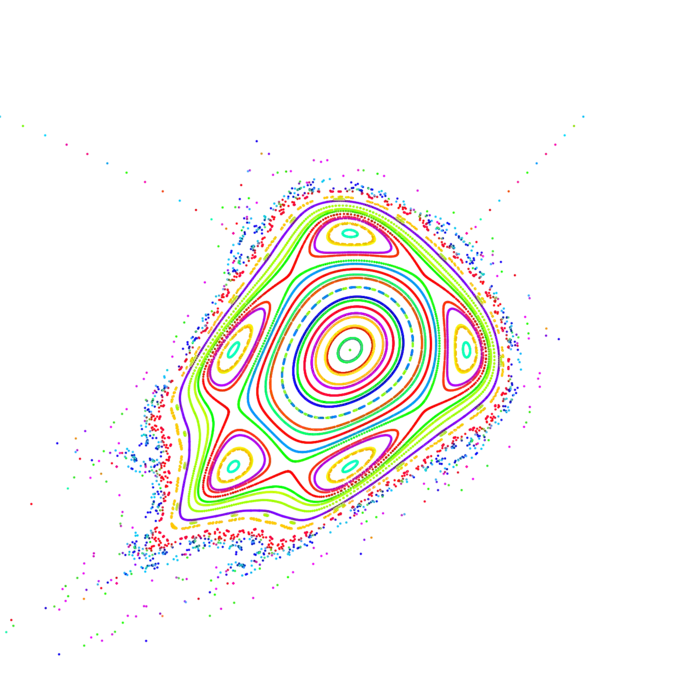
图 3. 映射 是一个 Henon 映射。我们看到一些轨道。右侧的映射 出现在第一个小时。环面 充满了蓝色的“随机海”,其中包含红色的“稳定岛屿”。 链式法则解开反函数之谜
链式法则有助于求反函数的导数。比如, 这随后给出
隐函数微分:寻找神秘斜率
假设 是一条曲线。我们无法解出 。但我们仍可以假定 。利用链式法则求导给出 因此 在上面的例子中,点 在曲线上。现在 和 。所以, 。这称为隐函数微分。我们可以用它计算一个未知函数的导数。
保证解的存在:隐函数定理
隐函数定理保证在可微函数 的根 附近存在可微隐函数 。
定理 3. 若 ,,则存在 及函数 使得 。
证明。 令 如此小,使得对于固定的 ,函数 具有性质 且 ,并且在 内 。对于 的介值定理现在保证了 在 附近有唯一的根 。上面的链式法则公式然后保证,对于 ,为 写出的差商 有极限 。 ◻
附注:我们可以通过应用牛顿步 来求得 的根。泰勒(下节课会讲到)表明每一步的误差都被平方。牛顿步 在任意维数中也适用。可以通过建立 Id 是压缩映射,然后使用巴拿赫不动点定理来得到 的不动点,该点即为 的根,从而证明隐函数定理。
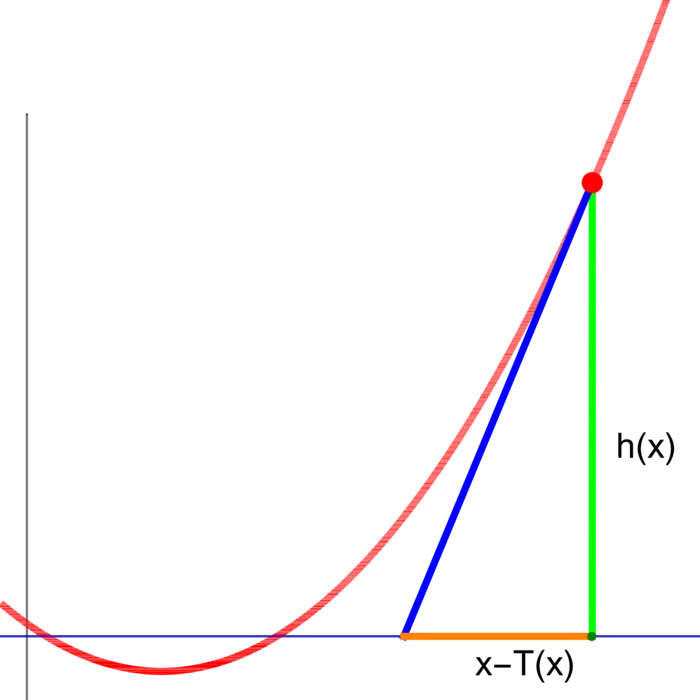 图 4. 牛顿步。
图 4. 牛顿步。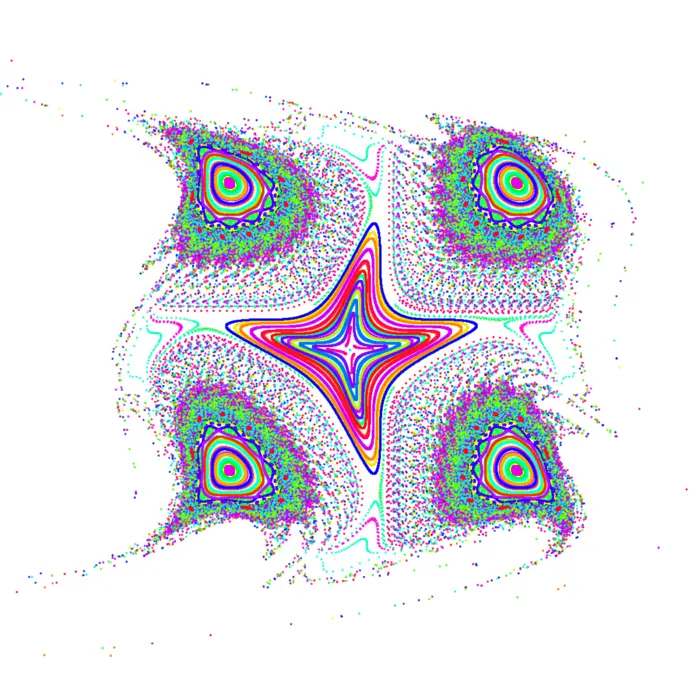 图 5. 如果我们反复应用映射 并绘制点,我们就会得到一条轨道。这样简单的动力系统在很大程度上仍未被理解。哪些点不会逃逸到无穷远?这个集合的边界是什么。证明存在保持有界的区域是困难的,并且需要“硬隐函数定理”。牛顿方法使我们能够掌握证明这一点,其中牛顿步被应用于函数空间。人类为处理数学问题而发明的一些最难的分析方法,都在这个看似简单的映射 中发挥了作用。
图 5. 如果我们反复应用映射 并绘制点,我们就会得到一条轨道。这样简单的动力系统在很大程度上仍未被理解。哪些点不会逃逸到无穷远?这个集合的边界是什么。证明存在保持有界的区域是困难的,并且需要“硬隐函数定理”。牛顿方法使我们能够掌握证明这一点,其中牛顿步被应用于函数空间。人类为处理数学问题而发明的一些最难的分析方法,都在这个看似简单的映射 中发挥了作用。第 16 和第 17 单元都在周三讲授。作业全部在第 17 单元。