装配过程:直接叠加法
整体结构的刚度矩阵(“全局”刚度矩阵)是通过组合每个独立单元的刚度矩阵而形成的。这个过程称为组装。其基本思想是,在任意给定的自由度上,总刚度是所有连接到该自由度的单元刚度贡献之和。
我们可以通过考虑一个简单的两弹簧串联系统来直观地理解这一点。
示例:两弹簧串联
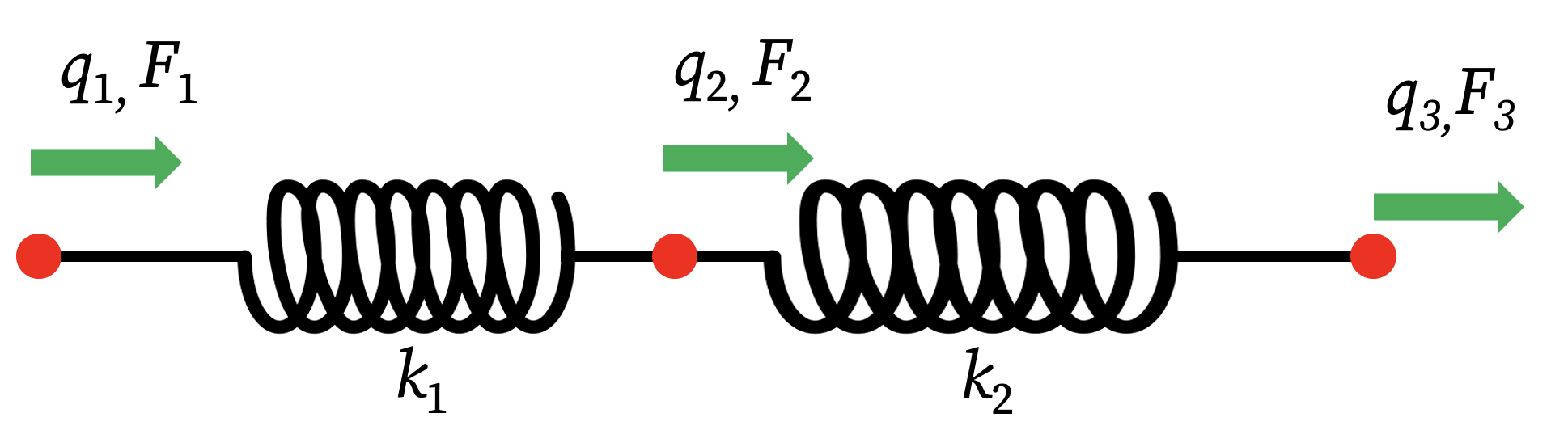
考虑一个具有三个节点和连接它们的两根弹簧的系统,如笔记中所示。存在三个节点位移(自由度)q₁, q₂, q₃ 和三个对应的节点力 F₁, F₂, F₃。
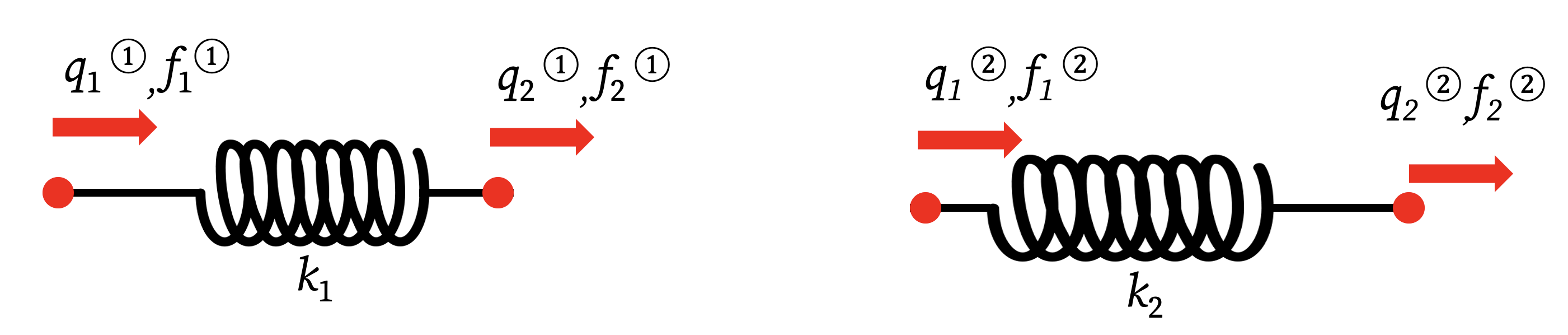
步骤 1:定义单元刚度矩阵 我们首先分别写出每个弹簧(单元)的刚度关系。每个弹簧都是具有两个节点的一维单元。
- 对于弹簧 1(刚度 k₁): 局部力
f₁⁽¹⁾和f₂⁽¹⁾与局部位移q₁⁽¹⁾和q₂⁽¹⁾相关。 - 对于弹簧 2(刚度 k₂): 类似地,对于第二个弹簧:
步骤 2:建立协调性与平衡 我们通过施加两个条件来连接各个单元:
- 位移协调性: 我们将单元的局部节点位移与结构的全局节点位移联系起来。
q₁⁽¹⁾ = q₁q₂⁽¹⁾ = q₂且q₁⁽²⁾ = q₂(中间节点是共享的)q₂⁽²⁾ = q₃
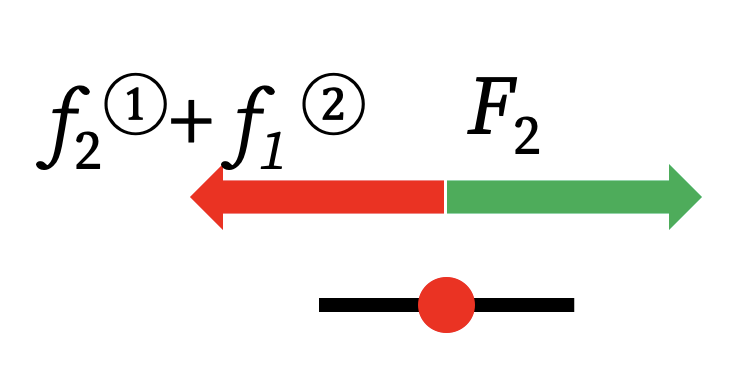
- 力平衡: 每个全局节点上的外力必须等于连接到该节点的所有单元的内力之和。
F₁ = f₁⁽¹⁾F₂ = f₂⁽¹⁾ + f₁⁽²⁾(中间节点上的力是来自两个弹簧的力之和)F₃ = f₂⁽²⁾
步骤 3:组装全局刚度矩阵 我们现在通过将单元方程代入平衡方程来构建全局系统 F = Kq。
- 第 1 行(力 F₁):
F₁ = f₁⁽¹⁾ = k₁q₁⁽¹⁾ - k₁q₂⁽¹⁾ = k₁q₁ - k₁q₂ - 第 2 行(力 F₂): 这是展示叠加的关键步骤。
F₂ = f₂⁽¹⁾ + f₁⁽²⁾ = (-k₁q₁⁽¹⁾ + k₁q₂⁽¹⁾) + (k₂q₁⁽²⁾ - k₂q₂⁽²⁾)代入全局位移:F₂ = (-k₁q₁ + k₁q₂) + (k₂q₂ - k₂q₃) = -k₁q₁ + (k₁ + k₂)q₂ - k₂q₃ - 第 3 行(力 F₃):
F₃ = f₂⁽²⁾ = -k₂q₁⁽²⁾ + k₂q₂⁽²⁾ = -k₂q₂ + k₂q₃
将这三个方程写成矩阵形式,便得到了整个结构的组装全局刚度矩阵:
注意,K₂₂ 项(k₁ + k₂)是连接到该自由度的两个单元的刚度之和。这种“直接叠加”是有限元方法中组装过程的本质。