畸变四边形单元:自然坐标系
矩形单元公式简单且有效,但它有一个主要缺点:它是为边与全局笛卡尔坐标轴(x,y)对齐的完美矩形定义的。现实中的几何形状复杂,仅使用完美矩形对复杂形状进行网格划分通常效率低下或不可能实现。
如果试图将上述推导出的形函数用于一般的、扭曲的四边形形状,它们将无法满足所需性质(例如,形函数在对边上可能不为零)。这是因为这些函数显式地与x和y坐标以及单元的特定尺寸a和b绑定。
为了分析任意形状的四边形单元,我们必须引入一个独立于全局坐标系中单元形状的新坐标系。这就引出了自然坐标的概念。
1. 自然坐标系
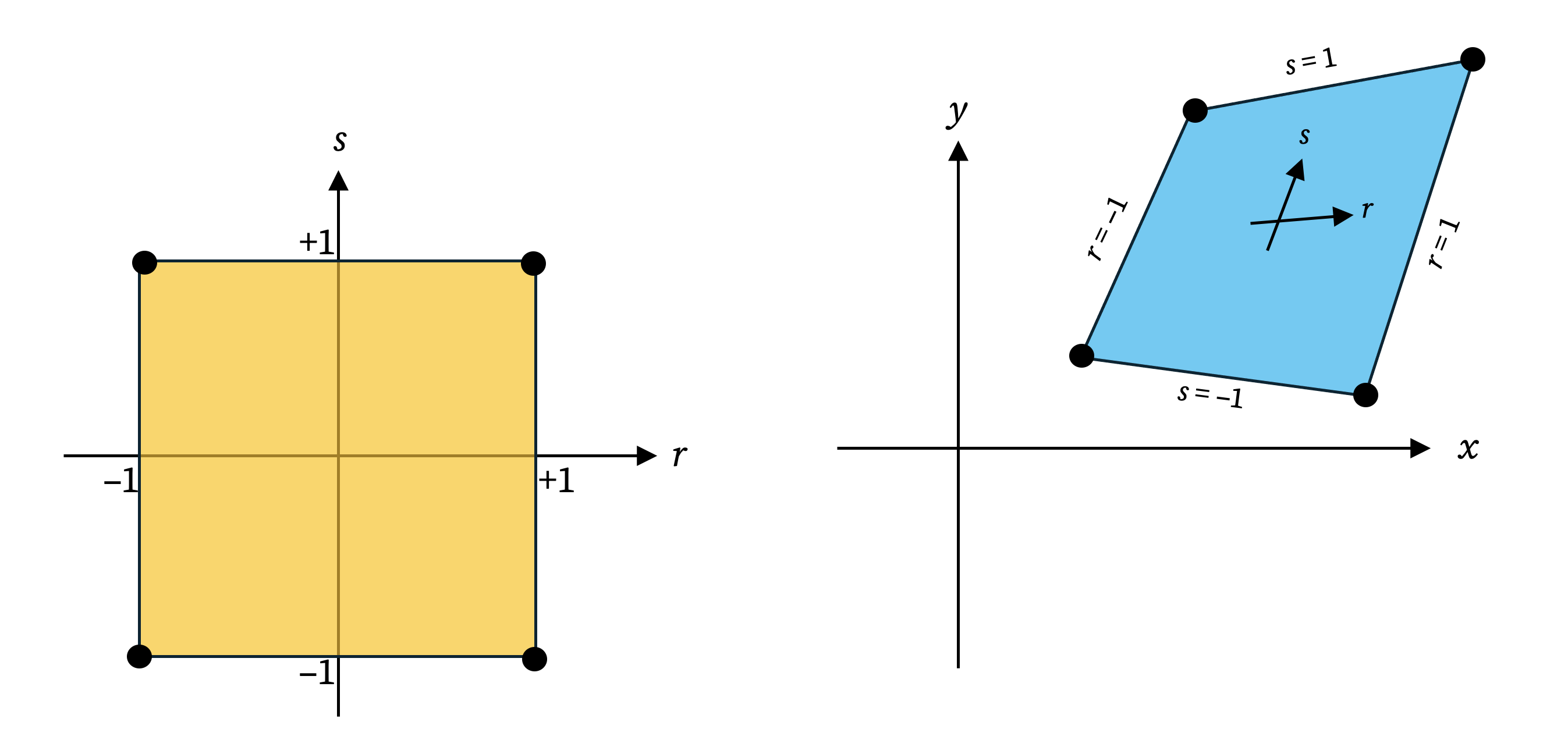
自然坐标系的核心思想是将全局(x,y)坐标系中任意形状的四边形映射到一个局部(r,s)坐标系中的单一完美正方形“母”单元上。
- 全局系统(真实单元):具有坐标x和y的物理单元。它可以是扭曲的,其边可能不平行。
- 自然系统(母单元):由坐标r和s定义的完美正方形,其中r和s的范围均为-1到+1。
这种映射将复杂的几何形状转换为简单、标准化的形状,极大地简化了公式化过程,尤其是积分。
2. 等参公式化:映射与形函数
等参公式化的巧妙之处在于,使用完全相同的形函数来定义几何映射,就像用来插值位移场一样。
2.1 自然坐标中的形函数
在(r,s)母正方形上,4节点单元的形函数具有简单而通用的形式,类似于用于矩形的乘积方法:
这些函数始终相同,无论真实单元在(x,y)平面中的形状如何。
2.2 几何映射
两个坐标系之间的联系是通过使用这些形函数从节点坐标插值全局坐标来建立的:
该映射使我们能够找到与任意自然坐标(r,s)点对应的全局(x,y)坐标。
2.3 位移插值
让我们使用完全相同的函数来描述单元内任意点(r,s)处的位移场(u,v)。连续位移场是通过离散节点位移值u_i和v_i使用同一组形函数插值得到的:
这里,ui和vi是节点位移向量q的分量。这可以用矩阵形式表示:
这种平行结构并非巧合;这正是等参单元的基本定义。
3. 雅可比矩阵:关联导数
要形成B矩阵,我们需要形函数对全局坐标x和y的导数。然而,我们的形函数是以自然坐标r和s定义的。我们可以使用偏微分链式法则关联这些导数:
该系统可以写成矩阵形式:
该方程中的矩阵就是雅可比矩阵,J。
由于我们需要对x和y的导数来形成B矩阵,我们必须反转这个关系:
雅可比矩阵的各元素可以通过对映射方程求导来计算(例如,)。
6. 自然坐标中的积分
最后一步是将刚度矩阵积分变换到自然坐标系中。微分面积元素同样变换:
雅可比行列式det(J)作为两个坐标系中微分面积之间的缩放因子。单元刚度矩阵积分变为:
该积分具有从-1到1的固定积分限,无论真实单元的形状如何。这种标准化形式非常适合数值积分技术,例如高斯求积法,这是有限元软件中计算这些积分的标准方法。