空间刚体的完全约束
我们现在考虑在空间中完全约束一个刚体所需的约束或支撑元件的总数。
考虑图 1 所示的物体。在图 1a 中,物体的某一点 已通过如图所示的三根刚性铰接杆固定在空间中。
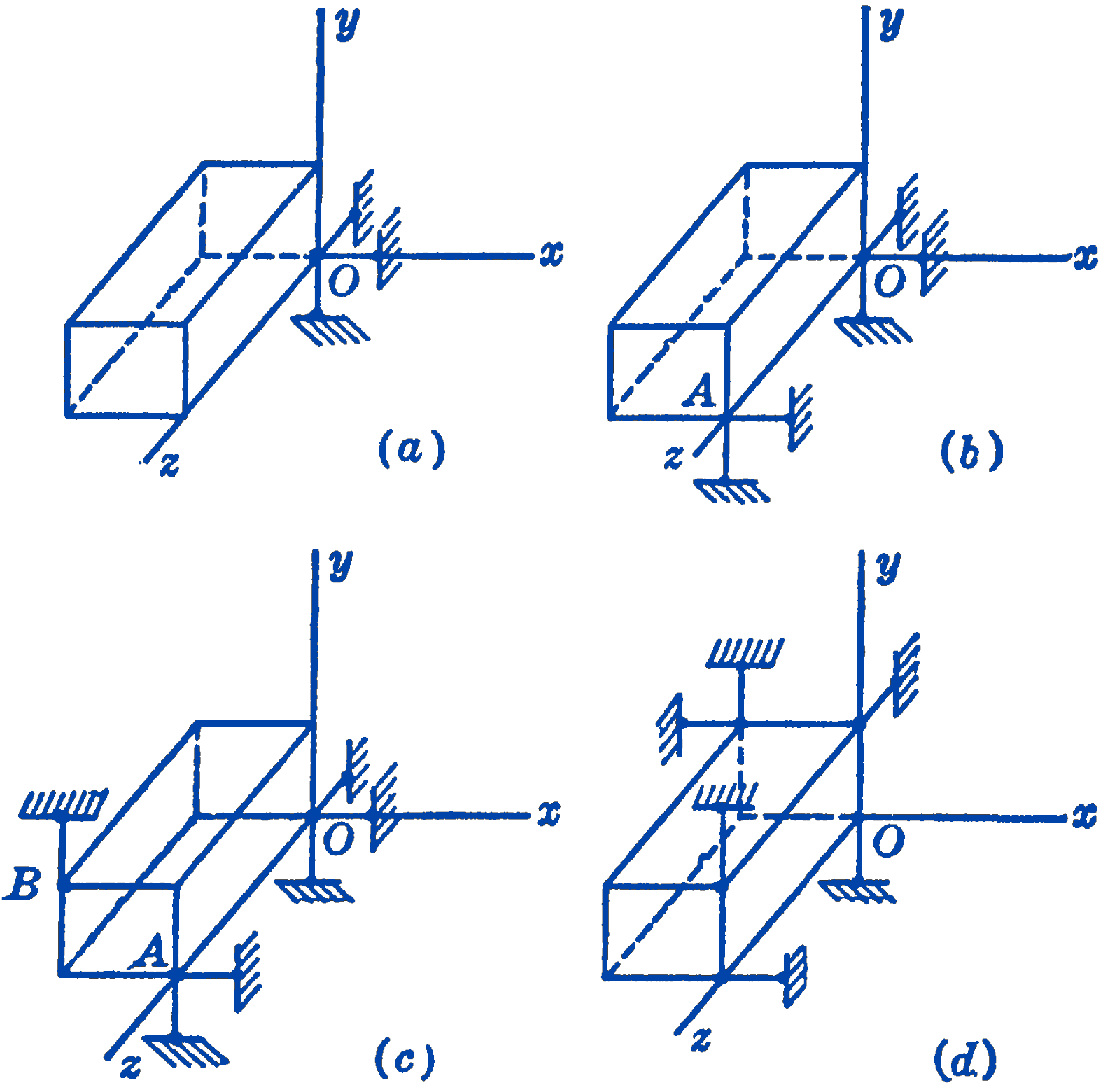
需要三根不共面的杆,否则该点可能会发生垂直于杆所在平面的运动。在图 1a 所示的约束下,物体中的任何点都可以以 为中心在球面内自由运动。在图 1b 中,另一个点 已被约束。如图所示,这可以通过两根杆来实现,这两根杆所在的平面垂直于 处的其中一根杆。该物体唯一可能剩下的运动是绕轴线 的旋转,这可以通过一根不与轴线 相交的铰接杆来阻止。例如,这可以通过图 1c 中 处所示的杆来实现。由此可见,六个元件将完全约束空间中的物体。没有必要完全按照图 1c 所示的方式来布置这些元件。例如,在图 1d 中,展示了六根杆的另一种布置方式,它达到了相同的目的。然而,我们会发现,对于一般的空间系统,少于六个元件是无法获得完全约束的。由此可见,这在通常情况下是成立的,因为为了达到平衡,已知力的六个分量(三个力分量和三个力偶分量)必须与约束力的六个大小相等、方向相反的分量相平衡。然而,并非任意六个元件都足以保证约束,因为支座之间的关系可能是允许发生运动的。例如,如果所有的杆都是平行的,或者布置在平行的平面内,则可能会发生垂直于该平面的运动。同样,如果这六根杆的轴线可以被一条直线相交,那么就有可能绕该直线发生旋转。
根据上述考虑,可以表明,空间中刚体完全约束的充要条件是它由六根铰接杆或某种等效结构支撑,且这些杆的作用线不能被同一条直线相交。这一条件包括了平行杆的情况,平行杆的作用线可以说是在无穷远处相交于同一条直线。
如果除了完全约束所需的杆之外,还使用其他杆来支撑物体,则此类附加支撑称为冗余约束。由于可以为一般力系建立六个静力学方程,显然,只要不存在冗余约束,承受任何载荷的物体的约束力总是可以通过静力学方程来确定。这种不存在冗余约束的情况被称为物体的静定约束,而增加冗余约束则使问题在静力学上成为(超静定)的。
我们会发现,同样的结论也适用于所有较简单的力系。在每种情况下,完全约束所需的支撑数量都等于可以为该系统建立的静力学方程的数量。