引言
展开形状:参数化的魔法
我们已看到,当参数化曲线 时,我们比观察由方程给出的曲线时有更多的控制。例如,很难用方程来描述螺旋线 。对于曲面也是如此,最好使用与维度相同数量的坐标。我们生活在二维球面 上,但不使用 坐标来描述曲面上的点。我们使用两个坐标:经度)和纬度。欧拉首先使用了参数化 ,其中 、 是角度。你可以快速验证 加起来等于 ,所以无论选择什么角度 、,我们始终在球面上。
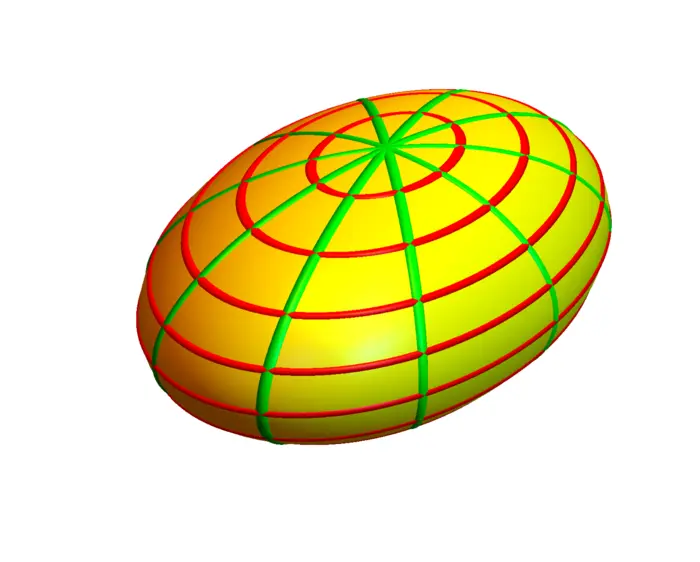
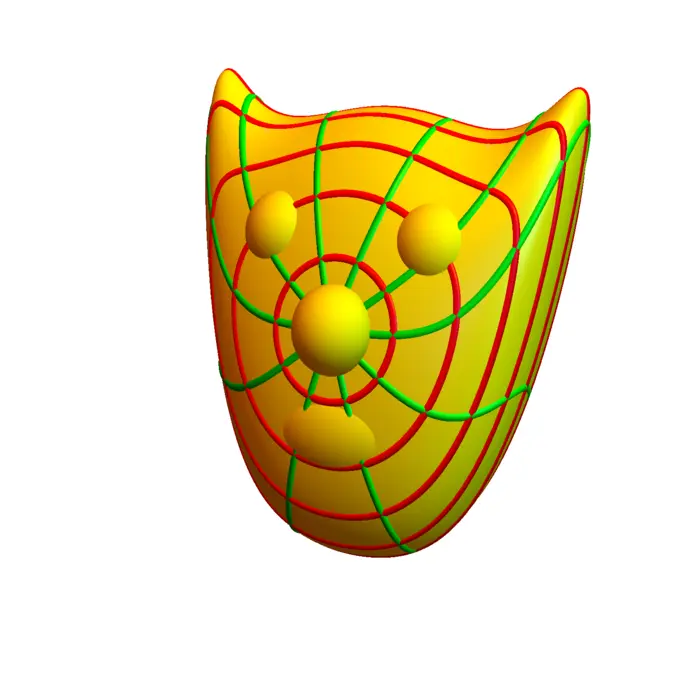
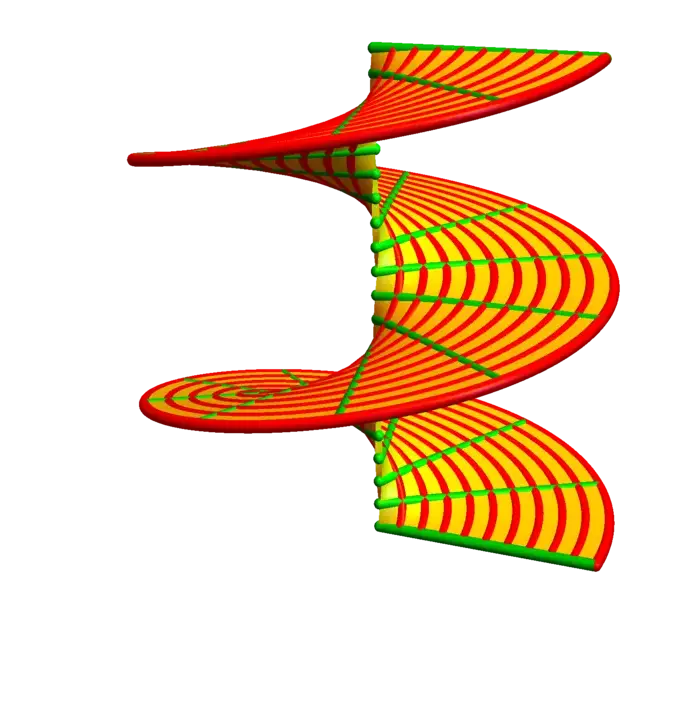
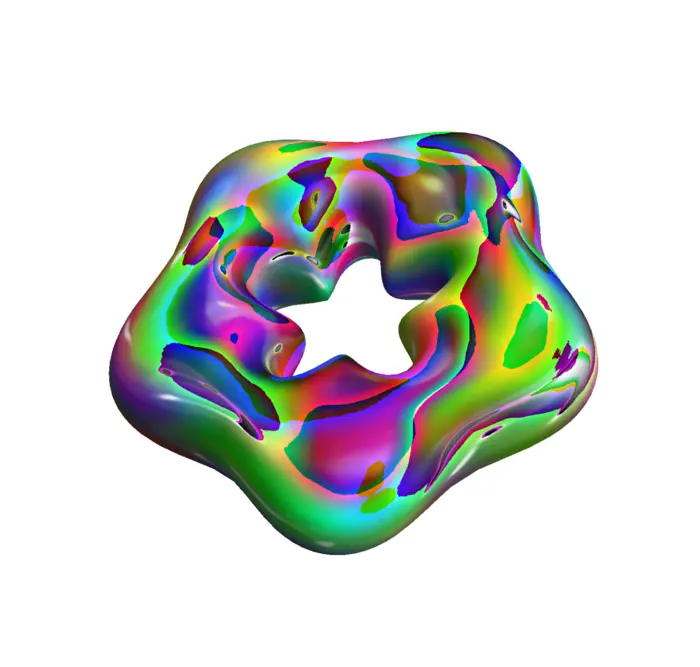
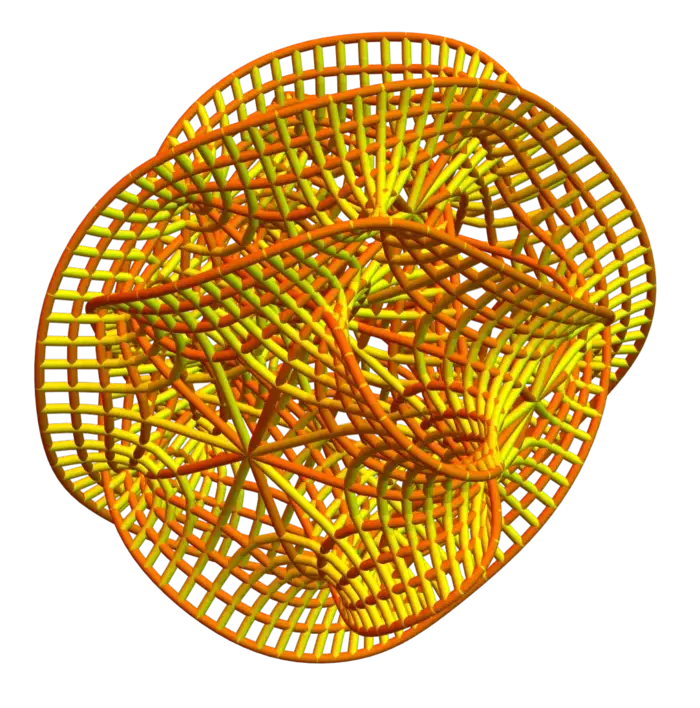 图 1. 该曲面是 Calabi-Yau 曲面的一个例子。它被参数化为 。我们画出了一些网格曲线,其中 为常数或 为常数。
图 1. 该曲面是 Calabi-Yau 曲面的一个例子。它被参数化为 。我们画出了一些网格曲线,其中 为常数或 为常数。 讲座
雅可比矩阵与曲面面积
映射 被称为参数化。我们已经见过从 到 的映射 ,它们是曲线。然后我们也见过映射 ,它们是坐标变换。在每种情况下,我们都定义了雅可比矩阵 。对于曲线 ,它就是速度 。对于坐标变换,雅可比矩阵 被用来得到体积畸变因子 。今天,我们关注 的情况,特别是 ,。与曲线的情况一样,我们用字母 来描述映射。映射 的像就是 中的一个 维曲面。畸变因子 定义为 ,稍后将用于计算曲面面积。
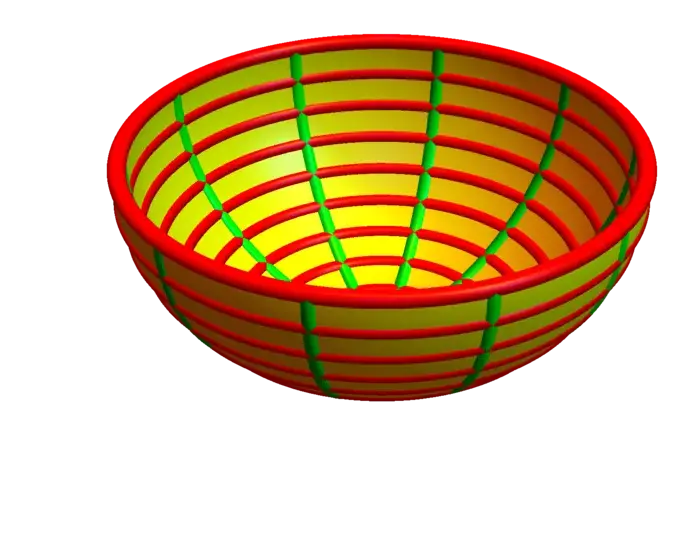
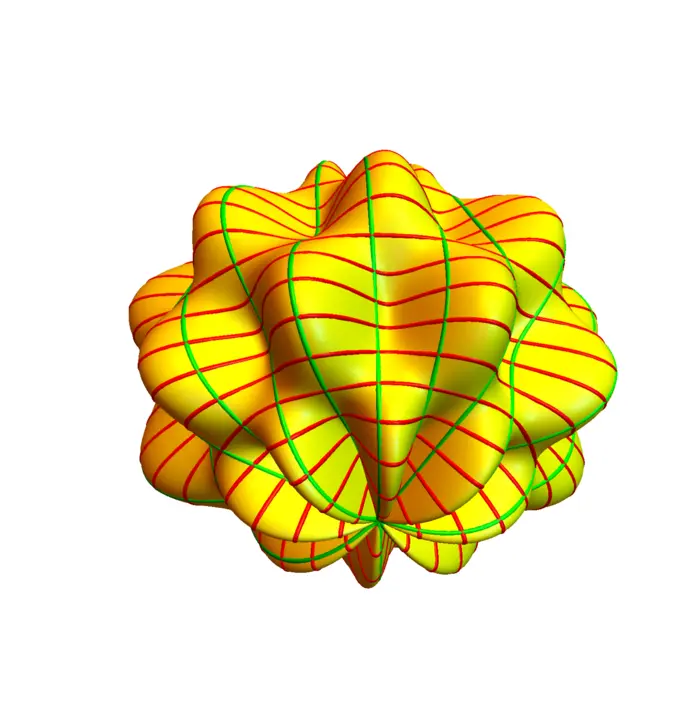
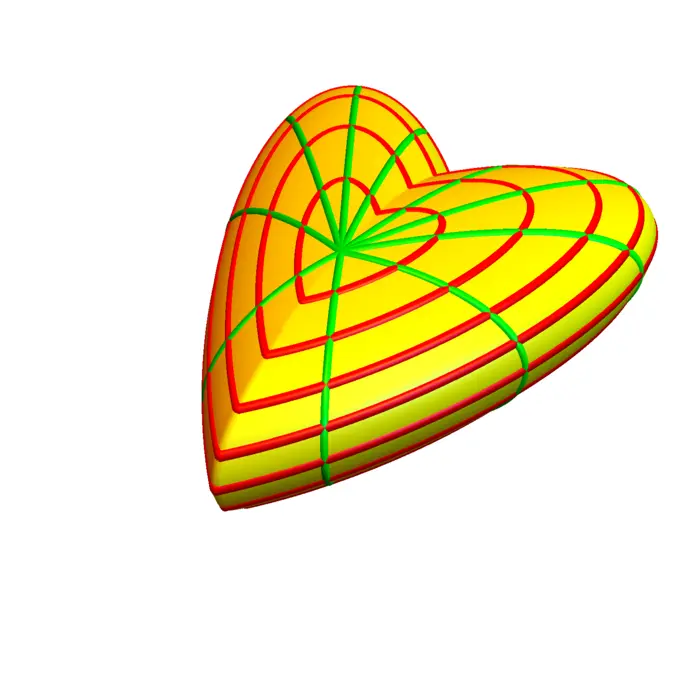
图 2. 一个椭球体、半个椭球体、一个灯泡、一个心脏和一只猫。 曲面与映射
我们这里主要讨论 和 的情况,因为我们自身就是由二维曲面组成的,如细胞、膜、皮肤或组织。映射 ,写为 定义了一个二维曲面。为了节省空间,我们也简写为 。在计算机图形学中, 被称为 映射。 平面是你绘制纹理的地方。映射 将其放置到曲面上。在地理学中,映射 被(意外地!)称为地图。多个地图定义一个图集。曲线 和 称为网格曲线。
球体与椭球体参数化一瞥
参数化 得到球面 。整个球面的范围为 ,。通过修改坐标,我们得到椭球面 满足 。如果允许 是 的函数,我们就得到“凹凸不平的球面”,如
平面与网格曲线
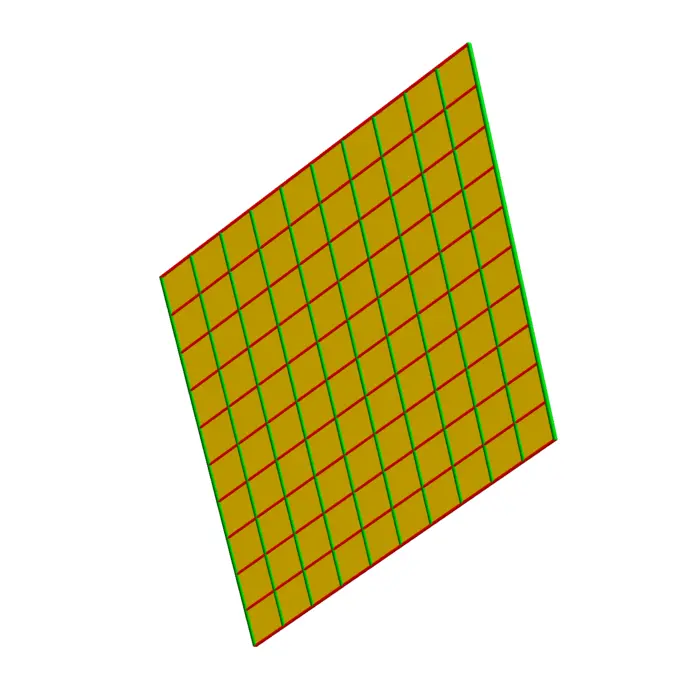
平面由线性映射 描述,其中 ,。雅可比映射为 。设 是 的两个列向量。实际上, 是 的缩写,即网格曲线 的速度向量。
平面参数化示例
一个例子是参数化 。此时 且 我们看到 其行列式为 。我们也有
揭示畸变因子:与叉积的联系
前面的计算提示了法向量与基本形式 之间的关系。在三维中,参数化 的畸变因子确实总是可以用叉积重写:
定理 1. .
证明. 由于 该恒等式是柯西-比内恒等式 它归结为 ,其中 是 和 之间的夹角。这就是你在图片中看到的网格曲线之间的夹角。 ◻
示例
示例 1. 对于单位球面 和 : 得到 且 是畸变因子。
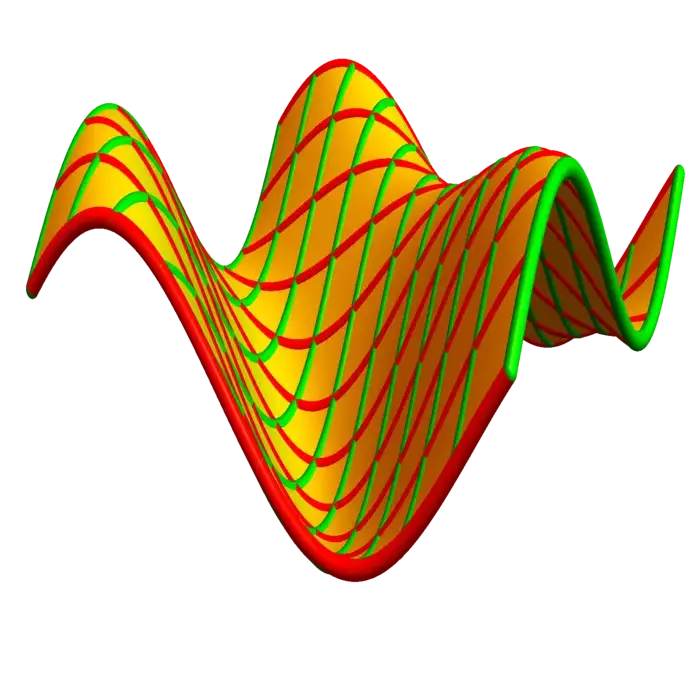
示例 2. 一类重要的曲面是图形 。它最自然的参数化是 ,其中映射 只是将底部部分提升到较高的版本。一个例子是椭圆抛物面 和双曲抛物面 。当然我们也可以写成 。
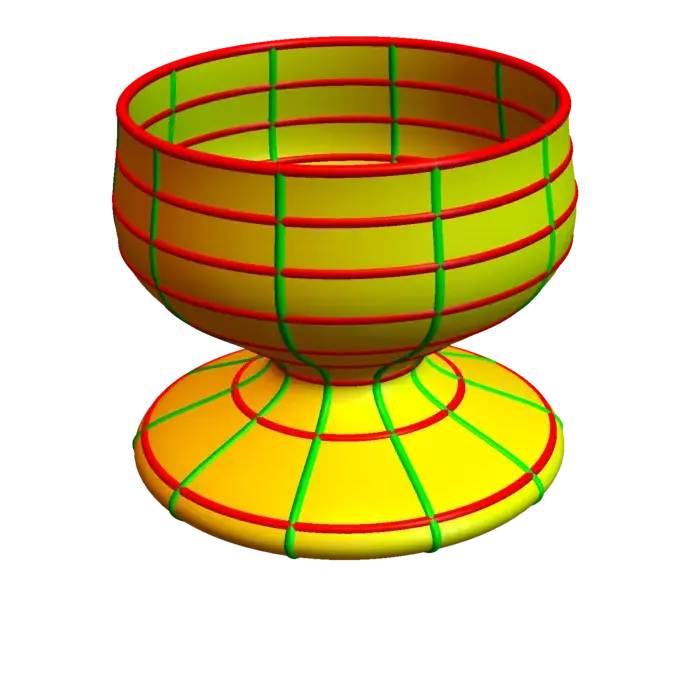
示例 3. 旋转曲面的参数化如 注意我们可以使用任何变量。此时使用了 、。一个例子是圆锥面 或单叶双曲面
示例 4. 圆环面在柱坐标下为 。我们可以使用极角 和以圆心为中心的极角将其参数化为 两个角度 和 都从 到 。我们现在也看到了与环面坐标的关系。
示例 5. 螺旋面是你看到的像楼梯或螺丝的表面。参数化是 。我们如何理解它?关键是看网格曲线。如果 ,我们得到曲线 ,它已被识别为螺旋线。另一方面,如果你固定 ,则得到直线。
附注:度量张量与黎曼几何
第一基本形式 也称为度量张量。在黎曼几何中,我们研究配备度量 的流形 。最简单的情况是 来自参数化,就像我们这里所做的。在物理学中,我们知道是质量使时空变形。量 是 的乘法类似物。对于可逆的正定方阵 ,我们稍后会看到恒等式 ,它说明了行列式和迹都是源自矩阵的关键数值量。迹是可加的,因为 ,而行列式是可乘的 ,我们稍后会看到。
表示流形的方法
综上所述,我们目前已经看到有两种根本不同的方法来描述流形。第一种是将其写为水平面 ,它是映射 的核。第二种是将其写为某个映射 的像。
插图
图 4. “地球与月球上的真理”主题(使用 Povray 渲染)。图 5. 一个水果和数学糖果 math-candy.com(在 Mathematica 中渲染)练习
练习 1. 将双叶双曲面上半部分 , 参数化为旋转曲面。
练习 2.
- 使用映射 参数化平面 。
- 现在求矩阵 并计算 以及畸变因子 。
- 也计算 、 和 ,然后计算 。你应该得到相同的数字。
练习 3. 给定 -环面的参数化 ,求描述该环面的隐式方程 。
练习 4. 参数化双曲抛物面 。什么是第一基本形式 ,即 畸变因子 是什么?
练习 5. 矩阵 也被称为第一基本形式。如果 是时空的参数化,那么 就是时空度规张量。矩阵 的元素出现在广义相对论中。现在出于某些原因,物理学家们使用希腊符号来访问矩阵元素。他们将第 行第 列的元素写作 。例如,它出现在爱因斯坦场方程中 我们只是想让你查阅这个方程,并说明每个变量叫什么,以及它是矩阵、标量函数还是常数。