我们来推导简单两节点桁架(杆)单元的著名刚度矩阵。即,考虑两端两个自由度 和 及其相应的力 和 。
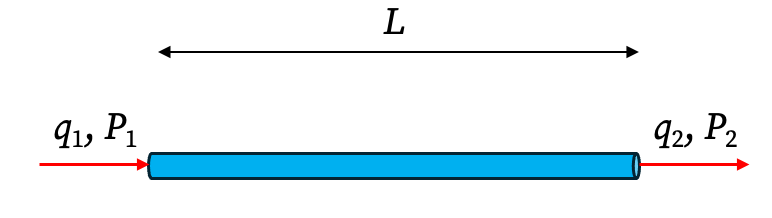
源自标准矩阵分析:
力的平衡要求 。由材料力学可知 以上方程可写为
根据结构分析,对于等截面面积 A、杨氏模量 E 和长度 L 的杆,其刚度矩阵为:
源自 FEM 第一性原理: 现在,利用 FEM 积分 来推导。
位移场: 沿杆任意点的轴向位移 u(x) 可通过线性形函数从节点位移 q₁ 和 q₂ 插值得到。若 且 ,则 若 且 ,则
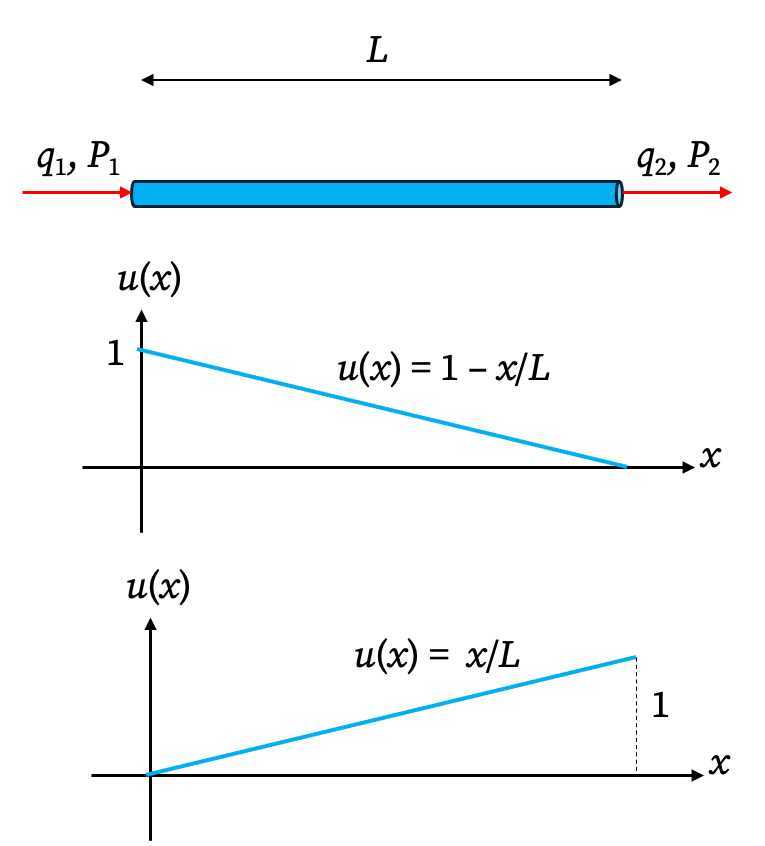
利用叠加原理,得到 其中 为形函数矩阵。
- 应变场: 轴向应变
ε 是位移的导数。 - 应变-位移矩阵 (B): 由以上可知,对于此简单单元,B 矩阵为常数:
- 材料矩阵 (E): 对于一维轴向应力,材料矩阵 E 就是标量杨氏模量 *E*。
积分: 现在计算单元体积上的刚度矩阵积分()。
由于积分内各项相对于 x 为常数:
这成功利用 FEM 基本原理复现了已知结果。
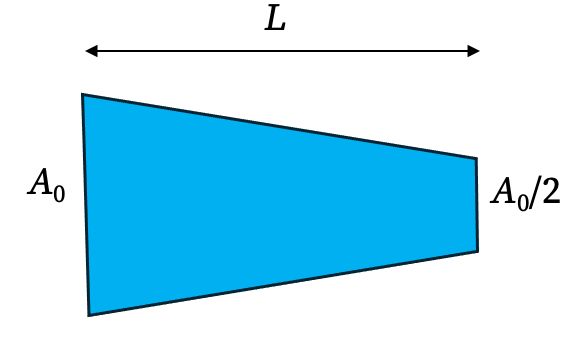
变截面杆分析
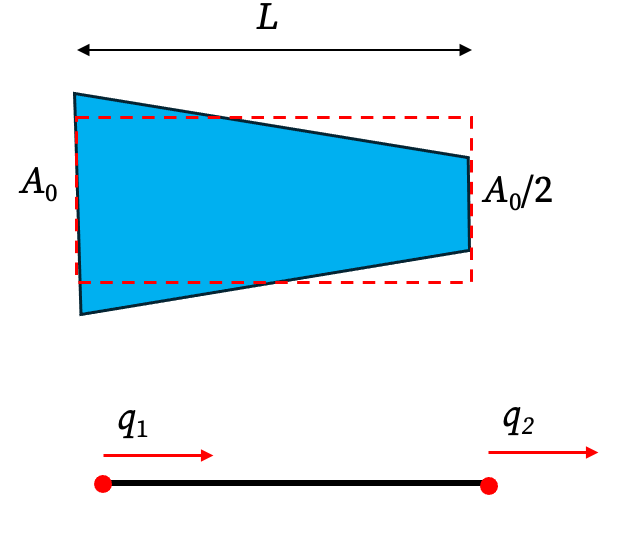
考虑一根长度为 L 的杆,一端固定,另一端受集中荷载 P₁。其横截面面积线性变化:
1. 解析解
通过沿长度对应变进行积分,可求得“精确”位移。
由于没有分布力,各点的内力 必须为常数,等于轴向力 。因此, 从而
但 且 由于 , 因此精确刚度矩阵为
2. FEM 解(单个线性单元)
现用单个两节点有限单元对同一根杆建模。采用与桁架示例相同的线性形函数,这意味着 B 矩阵仍为
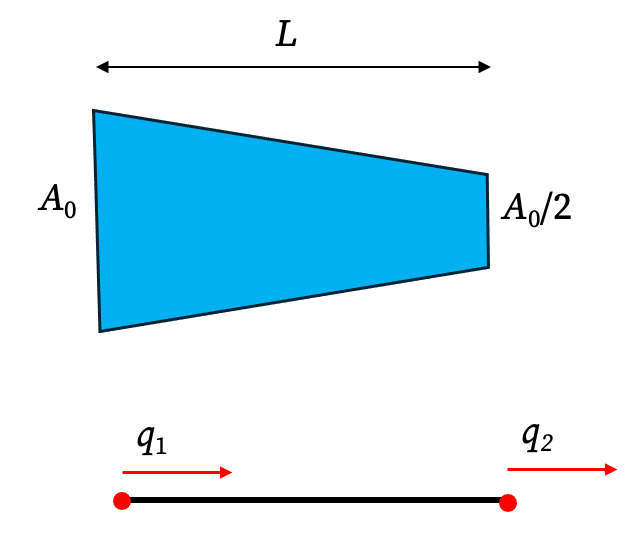
关键区别在于面积 A(x) 现在位于刚度积分内:
代回 K 的表达式:
此结果为近似值。线性位移场假设(u(x) = Nq)导致恒定应变场(ε = Bq),不能表示变截面杆中真实的变化应变。这种差异导致误差(此处单元刚度过大)。
在此方法中,似乎已将杆替换为具有等于平均横截面面积 的等截面杆。误差仅约 4%。
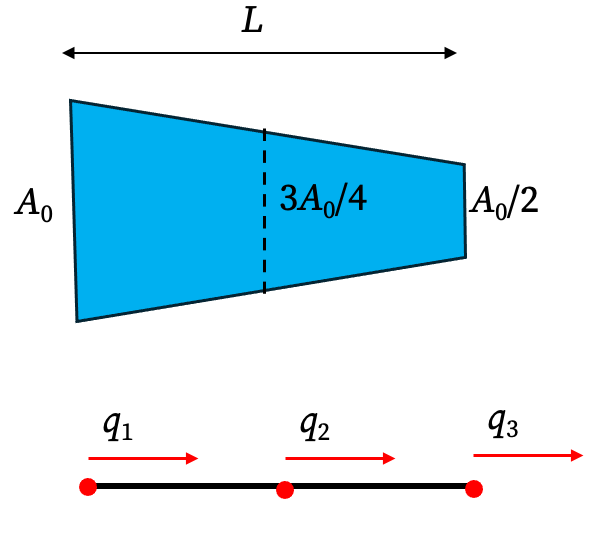
3. 提高 FEM 精度:变截面杆的两单元模型
用两个长度为 L/2 的线性单元对变截面杆建模。可用各单元中点处的值将面积近似为常数。
- 单元 1(x = 0 到 L/2): 中点在
x=L/4。 A₁ = A₀(1 - (L/4)/2L) = (7/8)A₀。 - 单元 2(x = L/2 到 L): 中点在
x=3L/4。 A₂ = A₀(1 - (3L/4)/2L) = (5/8)A₀。
刚度矩阵为:
组装: 通过叠加每个自由度(节点)的贡献,将其组合成 3×3 整体刚度矩阵 Kglobal。
静态凝聚:
通常,我们只关心外部自由度(节点 1 和 3)间的关系,而非内部节点(2)。静态凝聚是一种用于消除内部自由度的矩阵缩减技术。分块整体系统为: 可写为 若内部节点无外力(Pi = 0),可求解 qi 并代回,得到仅关联外部自由度的凝聚刚度矩阵 Kcondensed。
将其应用于两单元模型 得到 2×2 矩阵
它提供了杆刚度的更精确结果,显著减小了误差(约 0.2%)。
4.2. 高阶单元
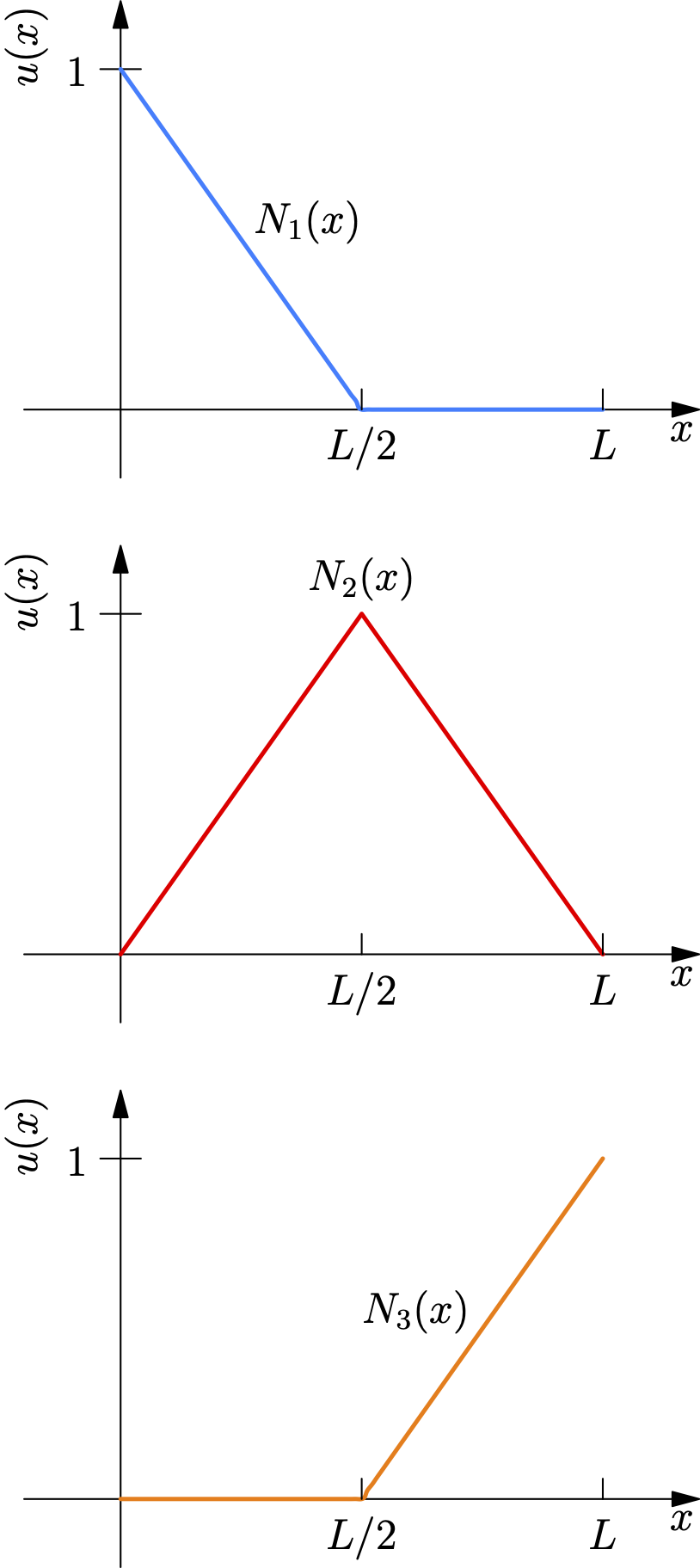
我们可使用单个更复杂的单元,而非更多简单单元。例如,二次单元在其中点有第三个节点,并采用二次多项式形函数。
对于 3 节点杆单元(节点位于 x=0, L, L/2),位移场为: 其中 N₁, N₂, N₃ 为二次函数:

这导致应变场 ε(x) 线性变化,对变截面杆是更好的近似。 计算 3×3 刚度矩阵
然后利用静态凝聚得到 2×2 外部刚度矩阵,结果精度很高(示例误差约 0.12%):
若采用线性形函数
则结果与选择两个单元的情形相同。