Elementos retangulares
Embora o elemento triangular seja simples e possa ser usado para malhar qualquer geometria bidimensional, sua precisão é limitada pela suposição de deformação constante. Para melhorar isso, introduzimos o elemento retangular de 4 nós. Este elemento permite uma distribuição de deformação mais complexa, levando a resultados mais precisos.
1. Campo de Deslocamento
Para este elemento, o campo de deslocamento (por exemplo, para o deslocamento u) é aproximado usando um polinômio de quatro termos. Uma adição crucial é o termo xy, que permite uma distribuição de deformação não constante.
Isso pode ser escrito na forma matricial:
Ao impor esta equação em cada um dos quatro nós, podemos resolver os coeficientes a em termos dos deslocamentos nodais u. Isso leva à relação familiar , onde N é o vetor das funções de forma.
2. Funções de Forma
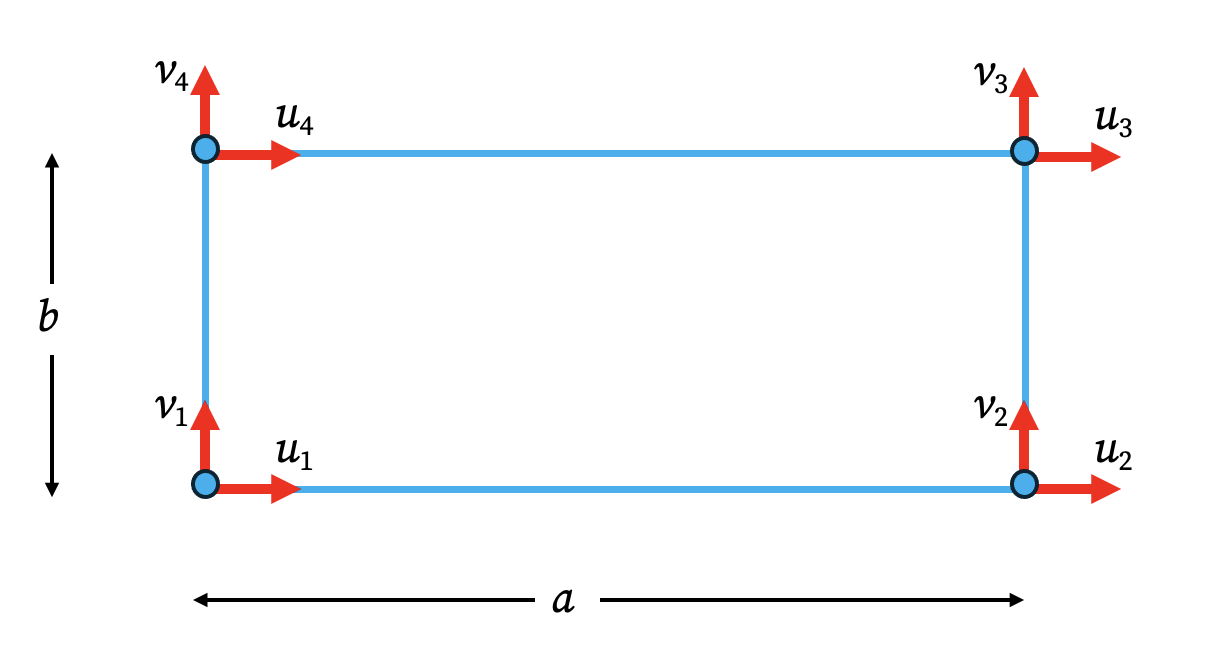
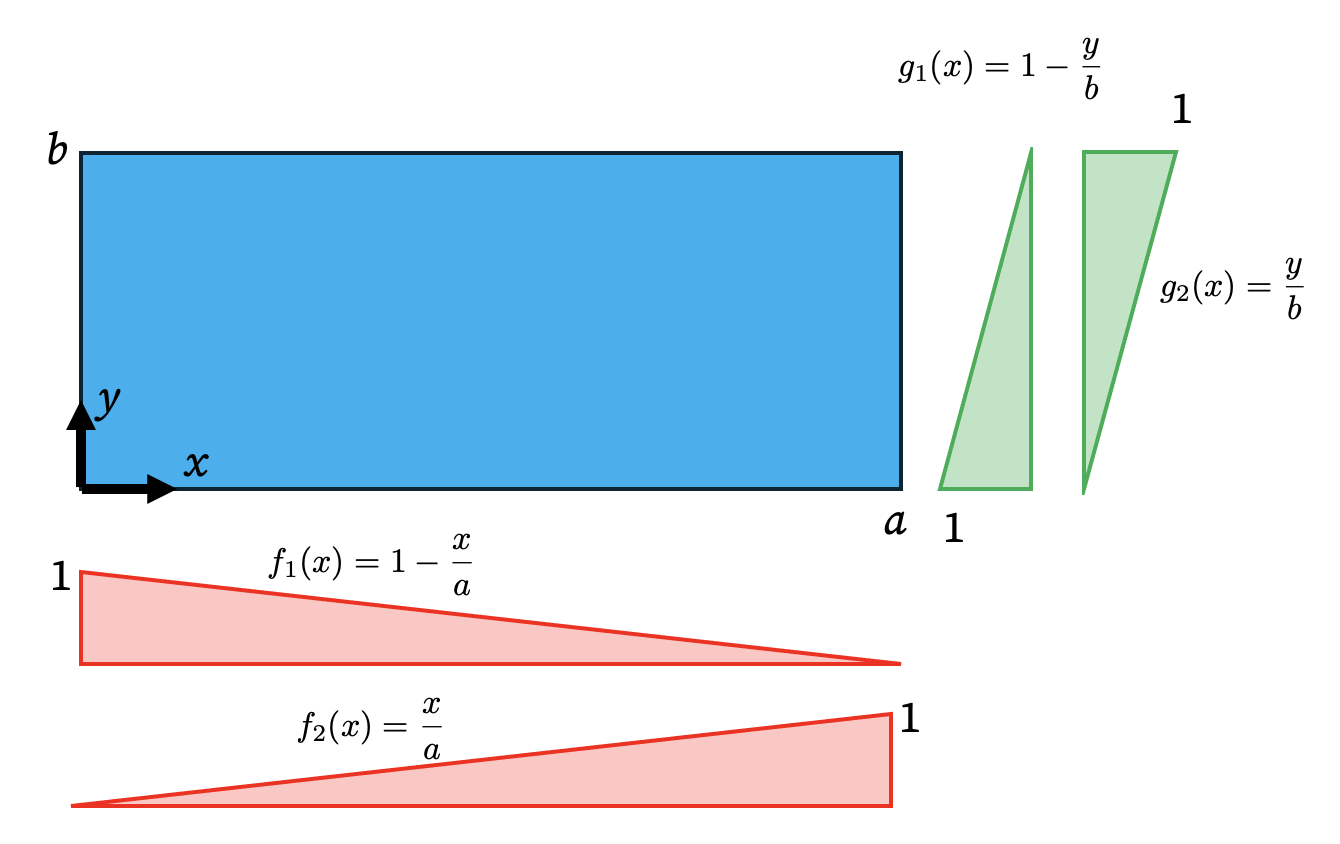
Em vez de uma inversão de matriz por força bruta, as funções de forma para um elemento retangular podem ser construídas elegantemente através do produto de funções de interpolação linear unidimensionais. Considere um retângulo com dimensões a e b. Podemos definir funções lineares simples em cada direção:
- Na direção x:
- Na direção y:
As funções de forma bidimensionais são então formadas tomando produtos dessas funções 1D. Para um nó i, a função de forma é o produto das funções 1D que são iguais a 1 nesse nó.
3. Matriz Deformação-Deslocamento e Rigidez
Como as funções de forma agora contêm termos x e y, suas derivadas não são mais constantes. Por exemplo, para :
A matriz B agora conterá termos que são funções de x e y. Isso significa que a deformação, dada por , não é mais constante dentro do elemento. Ela pode variar linearmente, o que é uma melhoria significativa em relação ao Triângulo de Deformação Constante.
A matriz de rigidez do elemento é calculada usando a fórmula padrão:
Como a matriz B é uma função de x e y, o integrando não é mais constante e a integração deve ser realizada explicitamente.