Elementos de viga
Elementos de viga são componentes fundamentais na análise estrutural, projetados para modelar membros que resistem a cargas principalmente por flexão. Diferentemente dos elementos de treliça, que lidam apenas com forças axiais, os elementos de viga podem suportar cargas transversais, que induzem forças cortantes internas e momentos fletores.
1. Fundamento Teórico: Teoria de Vigas de Euler-Bernoulli
A formulação para um elemento de viga “clássico” padrão é baseada na teoria de vigas de Euler-Bernoulli. Essa teoria fornece as relações cinemáticas essenciais que ligam a deformação do elemento às suas deformações internas. A teoria é construída sobre várias hipóteses fundamentais:
- Seções Planas Permanecem Planas e Perpendiculares: Esta é a hipótese mais crítica. Ela afirma que uma seção transversal que é inicialmente plana e perpendicular ao eixo central da viga permanecerá plana e perpendicular a esse eixo após a viga se deformar. Uma consequência importante disso é que a deformação por cisalhamento é considerada desprezível.
- Pequenos Deslocamentos e Rotações: As deflexões e inclinações da viga são assumidas como pequenas. Isso permite aproximações lineares, simplificando significativamente a matemática.
- Material Linear Elástico: O material da viga é assumido como isotrópico e obedecendo à Lei de Hooke, o que significa que a tensão é diretamente proporcional à deformação.
A partir dessas hipóteses, derivamos a equação mais importante para nossa formulação. Essa equação conecta a flexão física da viga à deformação interna experimentada por suas fibras materiais.
Para entender isso, imagine a viga se curvando em um arco suave. Em qualquer ponto ao longo de seu comprimento, podemos aproximar esse arco com um círculo de “melhor ajuste”. O raio desse círculo é chamado de raio de curvatura, denotado por ρ (rô).
- Uma curvatura muito suave e leve corresponde a um círculo com um raio muito grande, então ρ é grande.
- Uma curvatura acentuada e fechada corresponde a um círculo com um raio pequeno, então ρ é pequeno.
Agora, considere a deformação em uma fibra a uma distância y do eixo neutro da viga (que se encontra ao longo do centro desse círculo). Com base na geometria do arco, a deformação axial (εxx) é dada por:
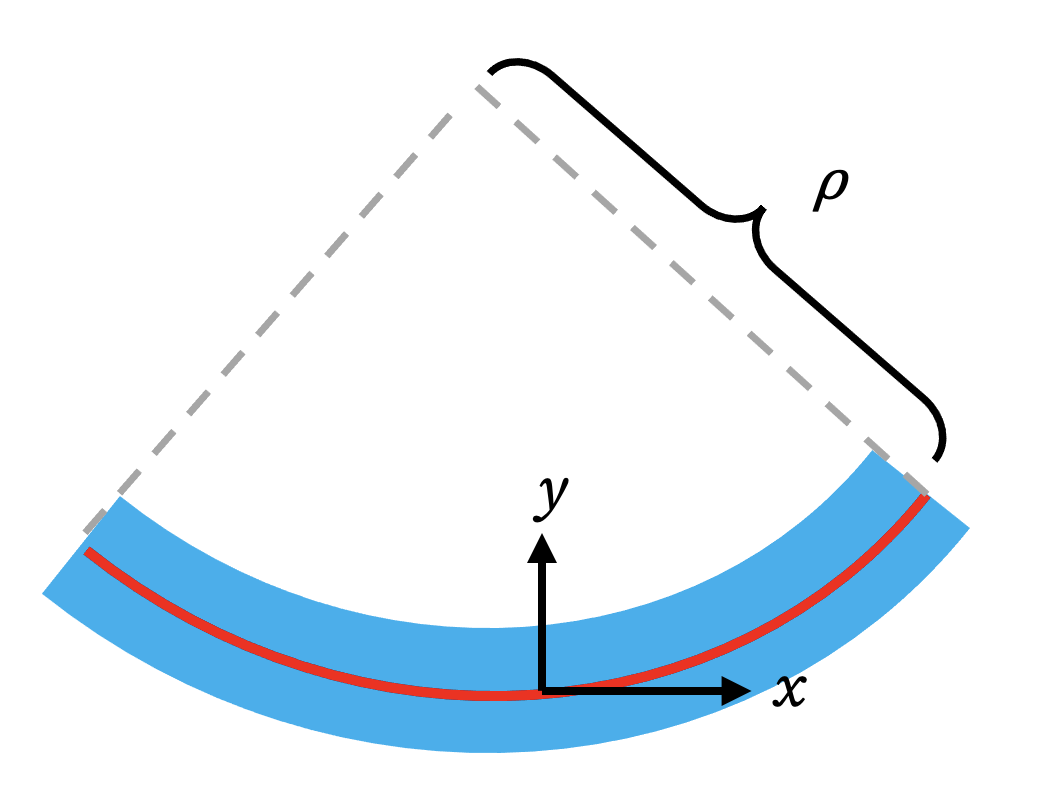
Essa relação simples e poderosa mostra que a deformação é zero no eixo neutro (y=0) e aumenta linearmente à medida que nos afastamos dele.
Por conveniência matemática na mecânica estrutural, é comum trabalhar com uma quantidade chamada curvatura, denotada por κ (kappa) (veja aqui). A curvatura é simplesmente o recíproco do raio de curvatura: Isso significa que uma curvatura suave (ρ grande) tem uma curvatura pequena, enquanto uma curvatura acentuada (ρ pequeno) tem uma curvatura grande. Usando essa definição, nossa equação de deformação se torna:
O passo crucial final é relacionar essa curvatura física à função de deslocamento transversal da viga, v(x). Para as pequenas deflexões assumidas na teoria de Euler-Bernoulli, há uma aproximação matemática direta:
Combinando essas relações, obtemos a equação final e essencial que liga a deformação interna à segunda derivada do campo de deslocamentos. Esta é a equação que forma a base de nossa derivação de elementos finitos:
2. Definição do Elemento e Graus de Liberdade (DOFs)
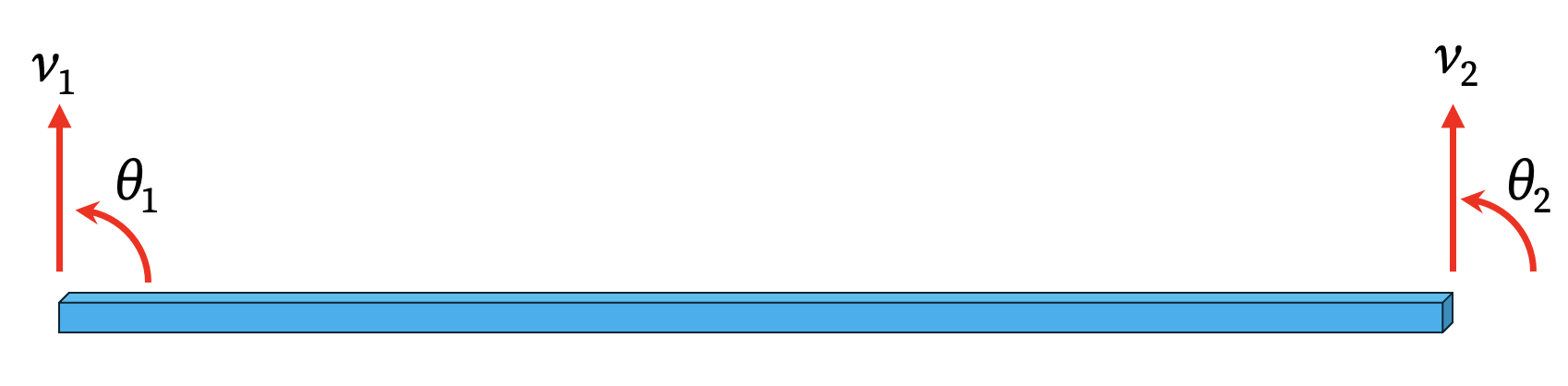
Para capturar o comportamento de flexão, definimos um elemento de viga de dois nós. Cada nó requer dois graus de liberdade (DOFs) para descrever seu estado:
- Um deslocamento transversal,
v. - Uma rotação,
θ.
Para ângulos pequenos, a rotação é igual à inclinação da curva de deslocamento, portanto θ = dv/dx.
Isso significa que um único elemento de viga tem um total de quatro graus de liberdade. Estes são reunidos no vetor de deslocamentos nodais generalizado do elemento, q:
3. O Campo de Deslocamentos e a Necessidade de Funções de Forma de Hermite
O núcleo do método dos elementos finitos é aproximar o campo de deslocamentos contínuo v(x) usando um número finito de parâmetros nodais. Uma função linear simples é insuficiente porque sua segunda derivada é sempre zero, implicando curvatura zero e, portanto, deformação por flexão zero.
O polinômio mais simples que pode representar uma curvatura variável não nula é um polinômio cúbico, que tem quatro coeficientes desconhecidos (a₀ a a₃). Isso combina convenientemente com nossos quatro DOFs nodais.
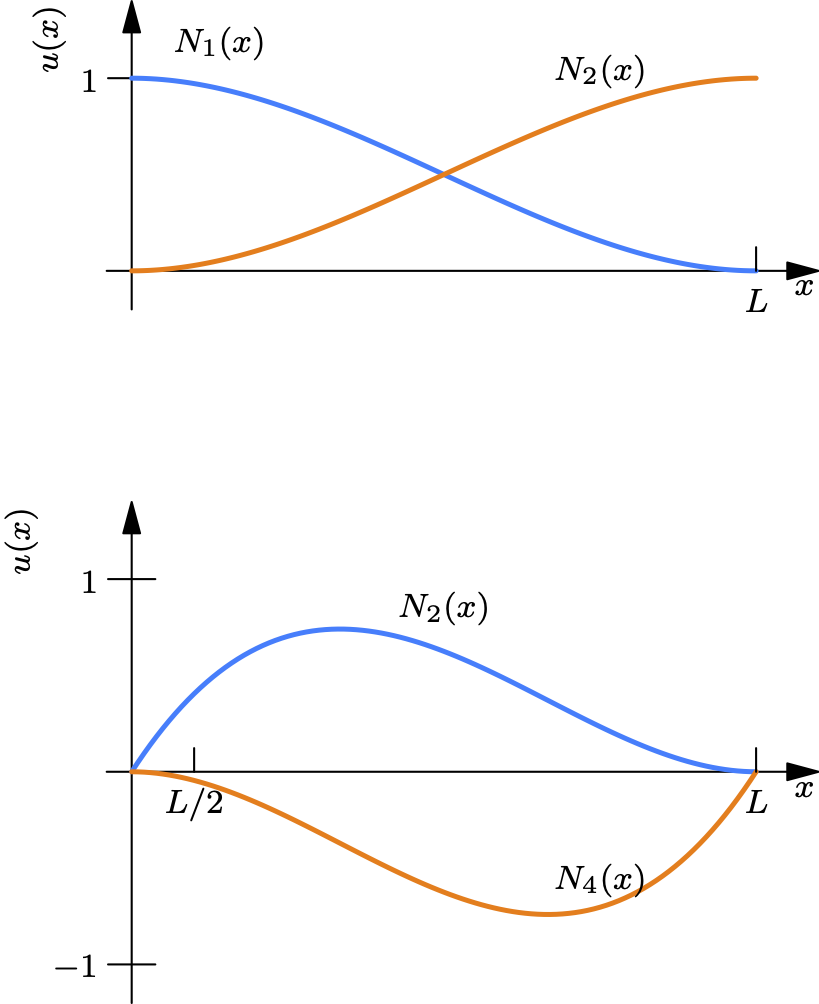
Embora pudéssemos trabalhar com os coeficientes a_i, é muito mais eficaz formular o problema usando funções de forma que relacionam diretamente o deslocamento v(x) aos DOFs nodais no vetor q. As funções de forma específicas usadas para isso são chamadas de Polinômios de Hermite.
Diferentemente das funções de forma de Lagrange mais simples que interpolam apenas valores, as funções de forma de Hermite interpolam tanto os valores quanto suas primeiras derivadas nos nós. Isso é exatamente o que precisamos para lidar tanto com o deslocamento (v) quanto com a rotação (θ = dv/dx). A consequência mais importante é que os polinômios de Hermite garantem continuidade C¹ entre elementos adjacentes, assegurando que a inclinação seja contínua nos nós e a forma deformada seja suave.
4. Derivação Passo a Passo das Funções de Forma de Hermite
Derivaremos as quatro funções de forma, N₁(x) a N₄(x), de modo que:
Cada é obtida assumindo e resolvendo para quatro coeficientes de modo que e todos os outros graus de liberdade () sejam zero.
Vamos derivar N₁(x) encontrando um polinômio cúbico único que corresponda a um deslocamento unitário no nó 1 (v₁=1) enquanto todos os outros DOFs nodais são zero.
Passo 1: Defina as Condições Nodais para N₁(x) A função deve satisfazer: 1. N₁(0) = 1 (Deslocamento unitário no nó 1) 2. N₁'(0) = 0 (Inclinação zero no nó 1) 3. N₁(L) = 0 (Deslocamento zero no nó 2) 4. N₁'(L) = 0 (Inclinação zero no nó 2)
Passo 2: Aplique as Condições a um Polinômio Cúbico Geral Seja N₁(x) = a x³ + b x² + c x + d. Sua derivada é N₁'(x) = 3a x² + 2b x + c.
Aplique as quatro condições: 1. N₁(0) = 1 => a(0) + b(0) + c(0) + d = 1 => d = 1 2. N₁'(0) = 0 => 3a(0) + 2b(0) + c = 0 => c = 0 3. N₁(L) = 0 => aL³ + bL² + 0*L + 1 = 0 => aL³ + bL² = -1 4. N₁'(L) = 0 => 3aL² + 2bL + 0 = 0 => 3aL² + 2bL = 0
Passo 3: Resolva para os Coeficientes a e b Da condição (4), obtemos b = - (3/2)aL. Substitua isso na condição (3): aL³ + (-3/2 * aL)L² = -1 aL³ - 3/2 * aL³ = -1 -1/2 * aL³ = -1 => a = 2/L³
Agora encontre b: b = -3/2 * (2/L³) * L => b = -3/L²
Passo 4: Monte a Função de Forma N₁(x) Substitua os coeficientes a, b, c, d de volta na forma polinomial:
Seguindo o mesmo procedimento para os outros três casos unitários, derivamos todas as quatro funções de forma de Hermite.
5. Derivando a Matriz de Rigidez do Elemento
O passo final é usar essas funções de forma para derivar a matriz de rigidez do elemento a partir da integral fundamental:
1. Defina a Matriz B: A deformação é e . A curvatura d²v/dx² é:
2. Configure a Integral de Rigidez: O diferencial de volume é dV = dA dx. Para um estado de tensão 1D, a matriz de elasticidade E é simplesmente o Módulo de Young, E. Substituindo a expressão para B: A) podem ser movidos para fora da integral interna:
3. O Resultado Final: Reconhecemos que o termo é a definição do segundo momento de área, I. Isso simplifica enormemente a integral: Avaliando as segundas derivadas das quatro funções de forma de Hermite, formando os produtos matriciais e integrando em relação a x de 0 a L finalmente produz a clássica matriz de rigidez de viga de Euler-Bernoulli 4x4:
Viga com Orientação Arbitrária e Matriz de Transformação
Se considerarmos 6 graus de liberdade (considerando um elemento de viga-coluna), onde a viga também pode ser esticada ou comprimida, então a matriz de rigidez do elemento é

Agora vamos considerar uma viga que faz um ângulo com o eixo global . Nesse caso, temos que girar o sistema de coordenadas global (x, y) por um ângulo para chegar ao sistema local (x', y').
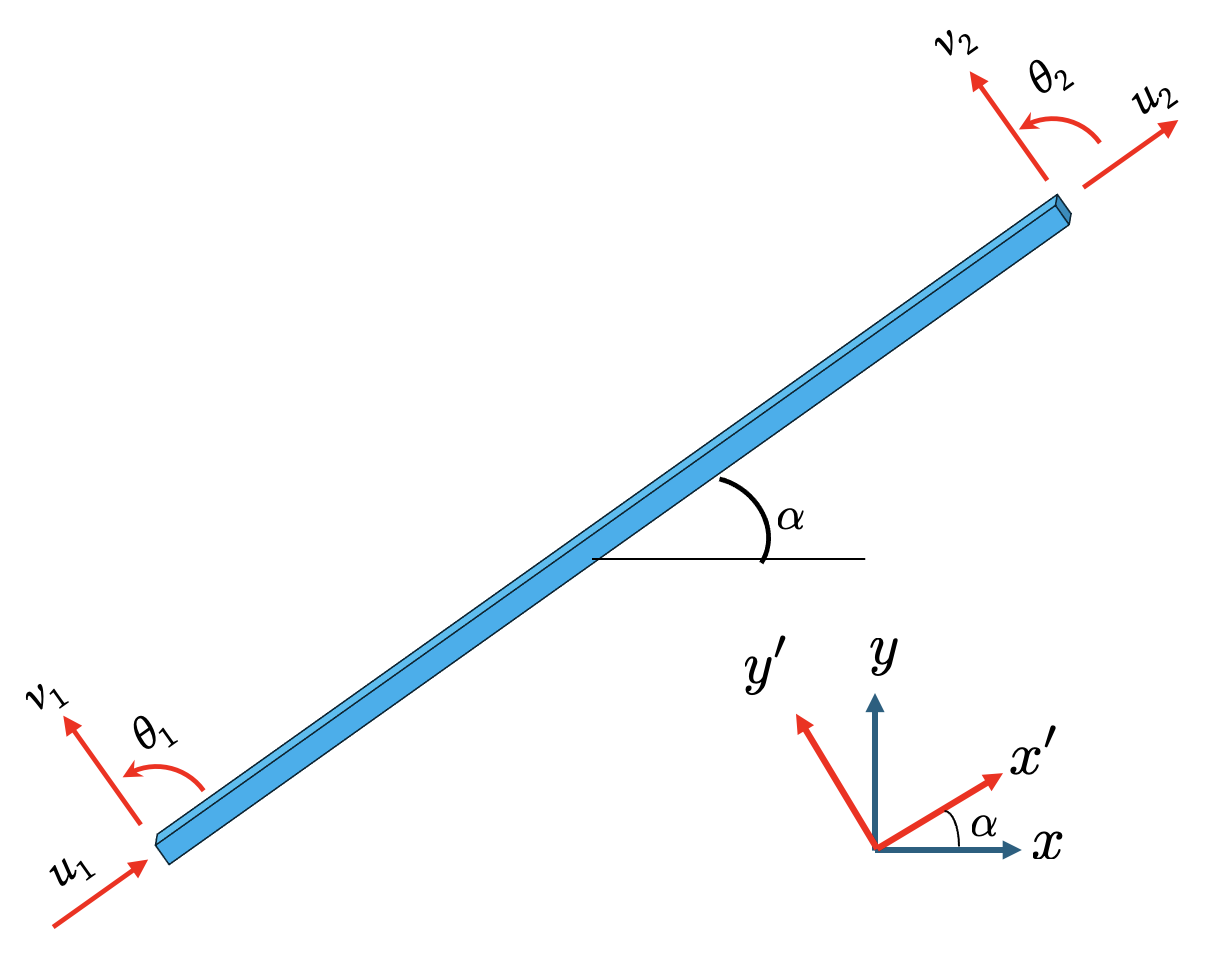
A transformação dos graus de liberdade e é a mesma que a transformação de u e v para um elemento de treliça. Como o grau de liberdade é o mesmo em ambos os sistemas de coordenadas, a matriz de transformação se torna
where A matriz de rigidez no sistema de coordenadas global se torna