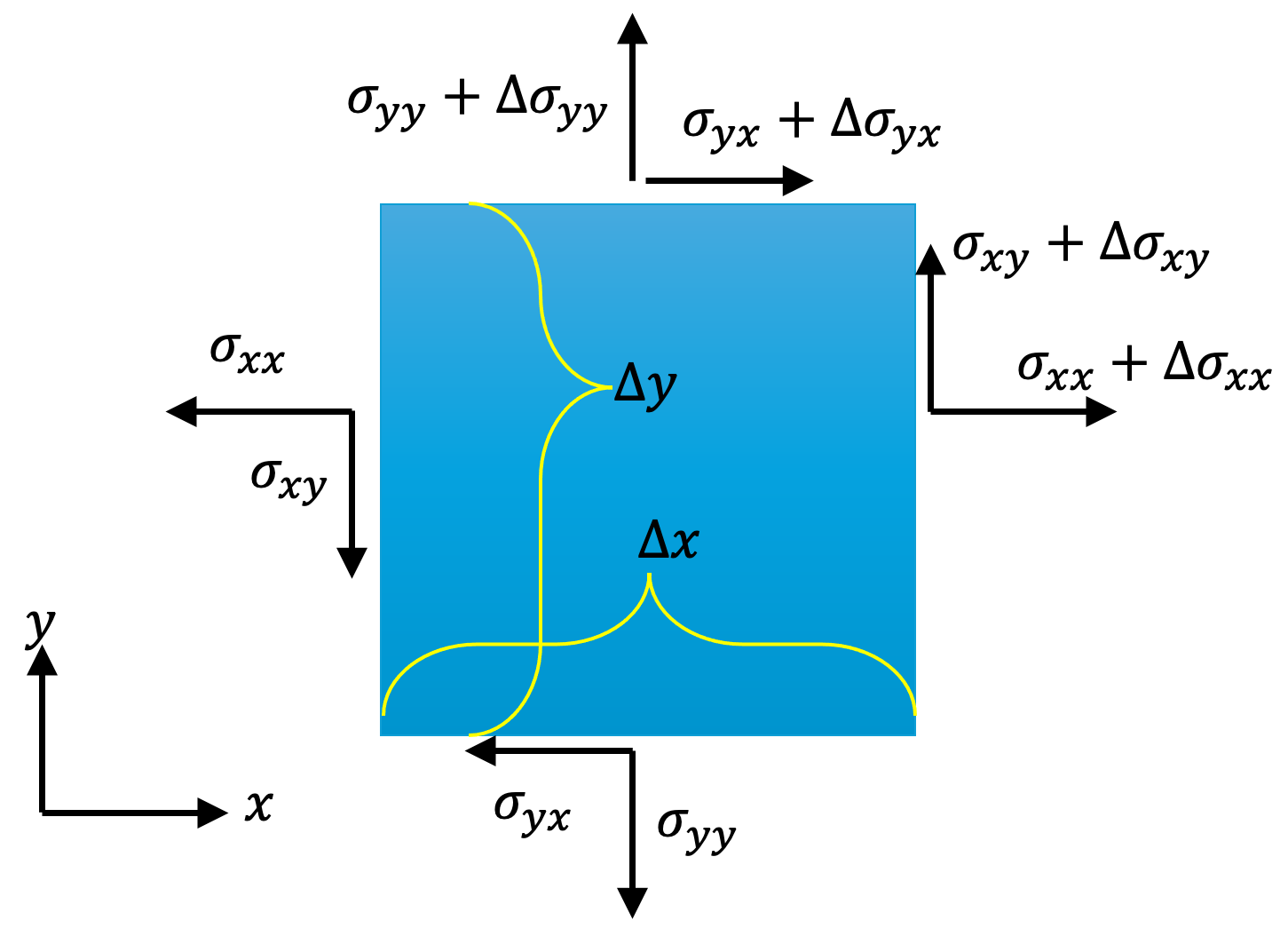
Simetria do tensor de tensões
Considere um paralelepípedo retangular de dimensões , e .
Segue da segunda lei de Newton para o movimento rotacional, que onde é o momento resultante em torno do eixo z, é o momento de inércia (ou massa rotacional) em torno do eixo e é a aceleração angular.
Da estática, lembramos que o momento de inércia de um bloco retangular em torno do eixo centroidal é onde é a massa do elemento. Expressando em termos de densidade, podemos escrever onde é a densidade de massa do material no ponto.
As componentes de tensão que contribuem para são as tensões de cisalhamento no plano . Forças de corpo não contribuem para o momento. Assim, o momento total pode ser expresso como
Aplicando a mesma lógica para rotações em torno dos eixos x e y, podemos provar que e . Isso significa que, em geral, e o tensor de tensão é sempre simétrico, e para especificá-lo precisamos apenas de 6 componentes independentes (em vez de 9). O resultado é válido independentemente de o corpo estar em repouso, em movimento uniforme ou acelerando. 1 Este resultado é conhecido como Segunda Lei do Movimento de Cauchy.
- O único caso em que a simetria da tensão pode ser violada é quando existem tensões de conjugado (momentos distribuídos). Isso entra em jogo para materiais muito específicos em casos específicos. Esse fenômeno é relevante apenas para materiais onde a microestrutura subjacente influencia a resposta mecânica macroscópica, uma consideração além da teoria clássica.↩︎