Relação entre Vetor de Tração e Tensor de Tensões
Para encontrar o vetor de tração
Como o tetraedro está em equilíbrio estático, a soma de todas as forças deve ser igual a zero. Equilibrando as forças na direção x, obtém-se: Aqui, o termo é a força na face oblíqua, os termos são as forças nas faces coordenadas e é a força de corpo.
Podemos usar duas relações geométricas fundamentais:
- As áreas das faces coordenadas são projeções da face oblíqua:
- O volume de um tetraedro é , onde é a altura perpendicular do ponto até a face oblíqua.
Substituindo essas relações no equilíbrio de forças e dividindo por , obtemos:
Para encontrar o vetor de tração no ponto , fazemos as dimensões do tetraedro tenderem a zero. Nesse limite, a altura se aproxima de zero, fazendo o termo da força de corpo desaparecer. Isso nos deixa com a componente x do vetor de tração:
Aplicando a mesma lógica às direções y e z, obtemos as outras componentes:
Como discutido anteriormente, o vetor de tração (também conhecido como tensão) pode ser decomposto em duas componentes: (1) uma componente de tensão normal e (2) uma componente de tensão de cisalhamento.
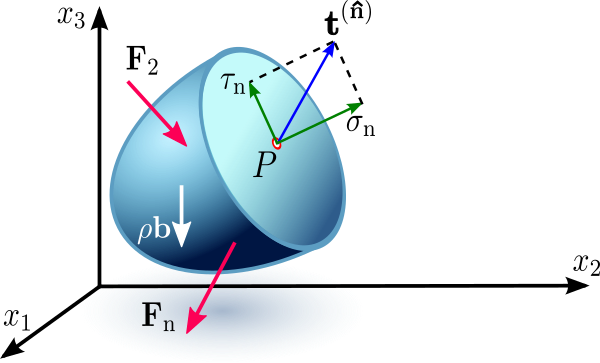
Da figura acima, fica claro que e, portanto,
Exemplo1 Uma partícula material está em um estado de tensão com os seguintes componentes:
- Calcule o vetor de tração em um plano que intercepta os eixos x, y, z em 1, 2 e 3, respectivamente.
- Calcule a magnitude da tensão normal no plano.
- Calcule a magnitude da tensão de cisalhamento no plano.
- Calcule a direção da tensão de cisalhamento no plano.
Solução
Primeiro encontramos o vetor unitário normal ao plano.
A equação de um plano que intercepta os eixos em x=1, y=2, z=3 é: Este plano é normal ao vetor:
Normalizando:
(a) Vetor de tração no plano
O vetor de tração é:
(b) Tensão normal no plano
A tensão normal é a projeção de sobre :
(c) e (d) Vetor de tensão de cisalhamento e sua magnitude
O vetor de tensão de cisalhamento é a componente de tangente ao plano:
A magnitude é:
A direção é:
✅ Resultados Finais
- Vetor de tração:
- Tensão normal:
- Magnitude da tensão de cisalhamento:
- Direção da tensão de cisalhamento: ao longo de
- Este exemplo é das notas de aula do Prof. Suo para ES240 na Universidade Harvard, com pequena adaptação.↩︎