Consider an imaginary surface that cuts a body into two parts.
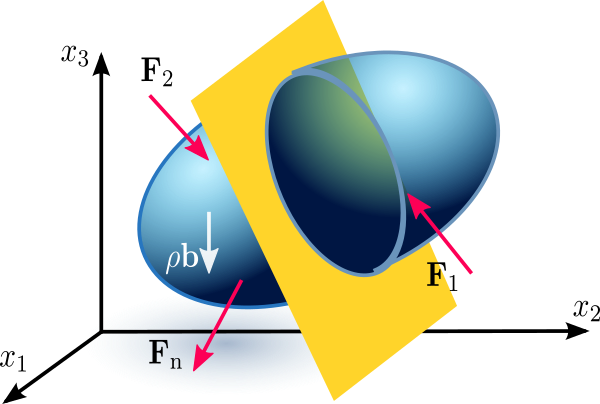
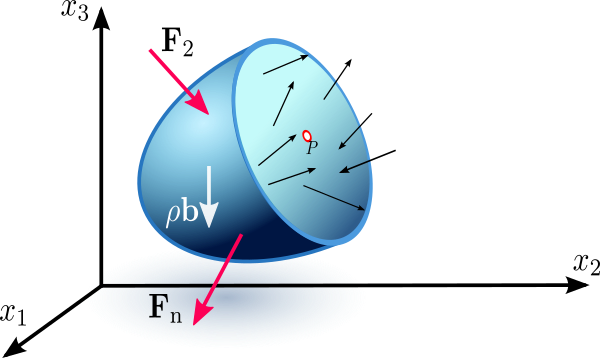
The material on one side of the surface exerts a system of forces on the material on the other side.
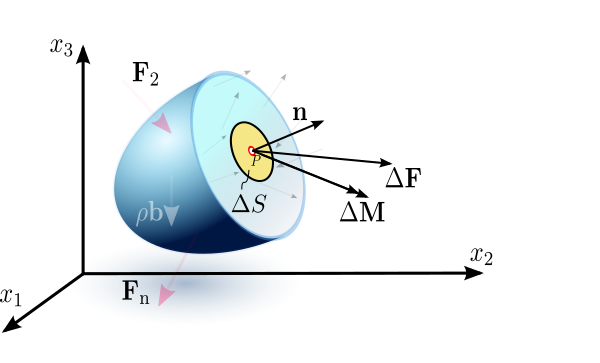
On a small area element \(\Delta S\) surrounding a point \(P\) on this surface, the resultant of the actual distribution of force on this area is a force \(\Delta \mathbf{F}\) and a moment \(\Delta \mathbf{M}\). Let \(\hat{\mathbf{n}}\) be the outward unit normal of the surface at \(P\).
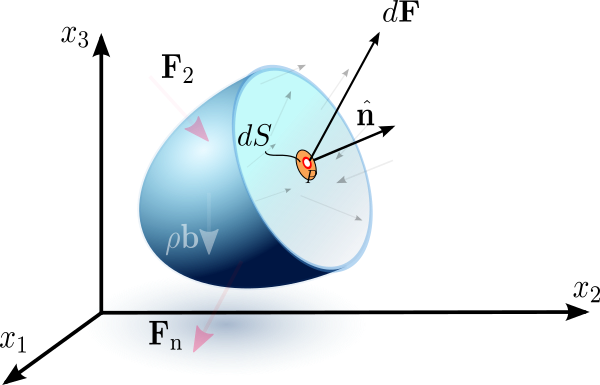
Now, we let \(\Delta S\) shrink to zero around \(P\) such that its greatest dimension also goes to zero.1 While \(\Delta\mathbf{F}\) and \(\Delta \mathbf{M}\) also go to zero, a fundamental assumption of continuum mechanics is that the ratio \(\dfrac{\Delta \mathbf{F}}{\Delta S}\) approaches a definite limit, while the effect of the moment vanishes.2 This limit of the force ratio is called the traction vector or stress vector, denoted by \(\mathbf{t}^{(\hat{\mathbf{n}})}\): \[ \mathbf{t}^{(\hat{\mathbf{n}})}=\frac{d\mathbf{F}}{dS}. \]
A stronger hypothesis, known as Cauchy’s Postulate, is also made: the traction vector \(\mathbf{t}^{(\hat{\mathbf{n}})}\) depends only on the point \(P\) and the surface’s orientation, \(\hat{\mathbf{n}}\), and is independent of the shape of the element or the surface’s curvature. The superscript \((\hat{\mathbf{n}})\) signifies this dependence on the normal vector.3
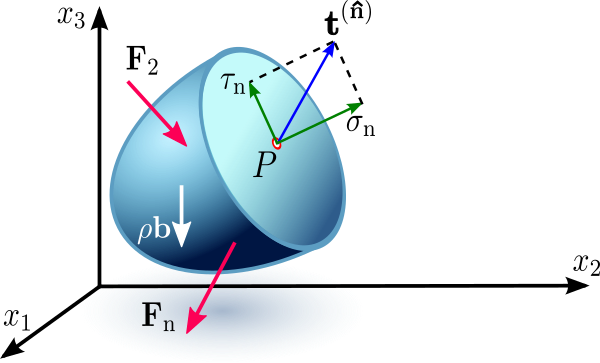
The stress vector can be resolved into two components: a normal stress \(\sigma_n\) which is perpendicular to \(\Delta S\) and a shearing stress (or shear stress) \(\tau_n\) which lies in the plane.
- Note that \(\Delta S\to 0\) is in contradiction with the fact that materials are composed of atoms and molecules, but keep in mind that (a) we assumed that the material is continuous and theres is there is no empty space between particles. (b) The above definition is very abstract and is never used in practice.↩︎
- A branch of continuum mechanics called couple-stress theory (or Cosserat theory) explores materials where \(\dfrac{\Delta\mathbf{M}}{\Delta S}\) does not approach zero. Instead, it approaches a limit called the couple-stress vector, which is important for modeling materials with significant internal microstructure.↩︎
- Note that \(\Delta S\to 0\) is in contradiction with the fact that materials are composed of atoms and molecules, but keep in mind that (a) we assumed that the material is continuous and theres is there is no empty space between particles. (b) The above definition is very abstract and is never used in practice.↩︎