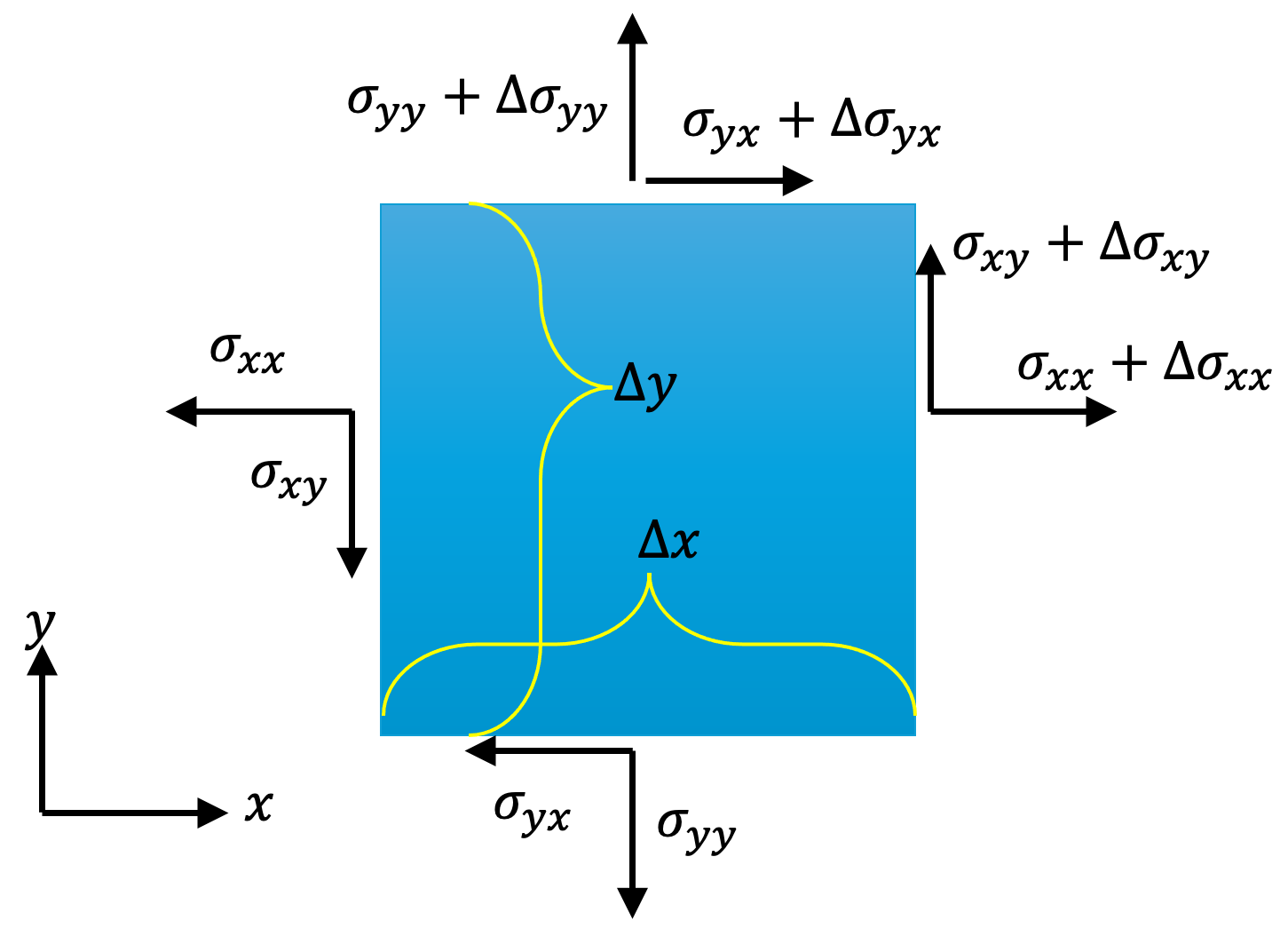
Consider a rectangular cuboid of dimensions \(\Delta x\), \(\Delta y\), and \(\Delta z\).
It follows from Newton’s second law for rotational motion, that \[ \sum M_z=I_{zz}\alpha_z \] where \(M_z\) is the resultant moment about the z-axis, \(I_{zz}\) is the moment of inertia (or rotational mass) about the \(z\)-axis and \(\alpha_z\) is the angular acceleration.
From statics, we recall that the moment of inertia of a rectangular block about the centroidal \(z\)-axis is \[ I_{zz}=\frac{1}{12}m [(\Delta x)^2+(\Delta y)^2] \] where \(m\) is the mass of the element. Expressing \(m\) in terms of density, we can write \[ m=\rho\, \Delta x\, \Delta y\, \Delta z \] where \(\rho\) is the mass density of the material at the point.
The components of stress that contribute to \(M_z\) are the shear stresses in the \(xy\)-plane. Body forces do not contribute to the moment. Thus, the total moment can be expressed as \[ \begin{aligned} M_z=&\left( \sigma_{x y}+\Delta \sigma_{x y}\right)(\Delta y \Delta z) \frac{\Delta x}{2}+\sigma_{x y}(\Delta y \Delta z) \frac{\Delta x}{2}\\ &-\left(\sigma_{y x}+\Delta\sigma_{y x}\right)(\Delta x \Delta z) \frac{\Delta y}{2}-\sigma_{y x}(\Delta x \Delta x) \frac{\Delta y}{2} \end{aligned} \] Equating this with the inertia expression, we obtain \[ \begin{aligned} &\frac{1}{12}\rho \Delta x \Delta y \Delta z [(\Delta x)^2+(\Delta y)^2]=\\ &\left( \sigma_{x y}+\Delta \sigma_{x y}\right)(\Delta y \Delta z) \frac{\Delta x}{2}+\sigma_{x y}(\Delta y \Delta z) \frac{\Delta x}{2}\\ &-\left(\sigma_{y x}+\Delta\sigma_{y x}\right)(\Delta x \Delta z) \frac{\Delta y}{2}-\sigma_{y x}(\Delta x \Delta x) \frac{\Delta y}{2} \end{aligned} \] Neglecting higher-order small terms, we get \[ 0=\sigma_{xy}\Delta x\Delta y\Delta z -\sigma_{yx}\Delta x\Delta y\Delta z, \] which leads to
\[ \sigma_{xy}=\sigma_{yz} \]
By applying the same logic for rotations about the x and y axes, we can prove that \(\sigma_{yz}=\sigma_{zy}\) and \(\sigma_{xz}=\sigma_{zx}\). This means that in general \[ \sigma_{ij}=\sigma_{ji} \] and the stress tensor is always symmetric, and to specify it we need only 6 independent components (instead of 9). The result holds regardless of whether the body is at rest, in uniform motion, or accelerating. 1 This result is known as Cauchy’s Second Law of Motion.
- The only case in which the symmetry of the stress may be violated is when couple stresses (distributed moments) exist. become into play for very specific materials in specific cases. This phenomenon is relevant only for materials where the underlying microstructure influences the macroscopic mechanical response, a consideration beyond the classical theory.↩︎