Try to get a heavy flywheel rotating by hand. Pull one of the spokes. You will find it difficult if you grasp it too near to the axle. Move your hand towards the rim, and thing’s will become easier.
But what has chanced? After all, the force is the same in both cases. The point of application of the force has changed.
In all that preceded, the question of where a force is applied did not arise, since the form and size of a body played no role in the problems under consideration. What we essentially did was to conceptually replace a body by a point.
The example with the rotation of a wheel shows that the question of the point of application of a force is far from idle when we are dealing with the rotation or revolution of a body.
In order to understand the role of the point of application of a force, let us compute the work which must be performed to turn a body through a certain angle. In this calculation, of course, it is assumed that all the particles of the body are rigidly bound to one another (we are ignoring at present the ability of a body to bend, contract and, in general, to change its form). Therefore, a force applied to one point of a body imparts kinetic energy to all its parts.
In computing this work, the role of the point of application of a force is clearly seen. A body fastened to an axis is shown in Figure 1. When the body turns through a small angle \(\varphi\), the point of application of a force moves along an arc—it is displaced by a distance \(s\).
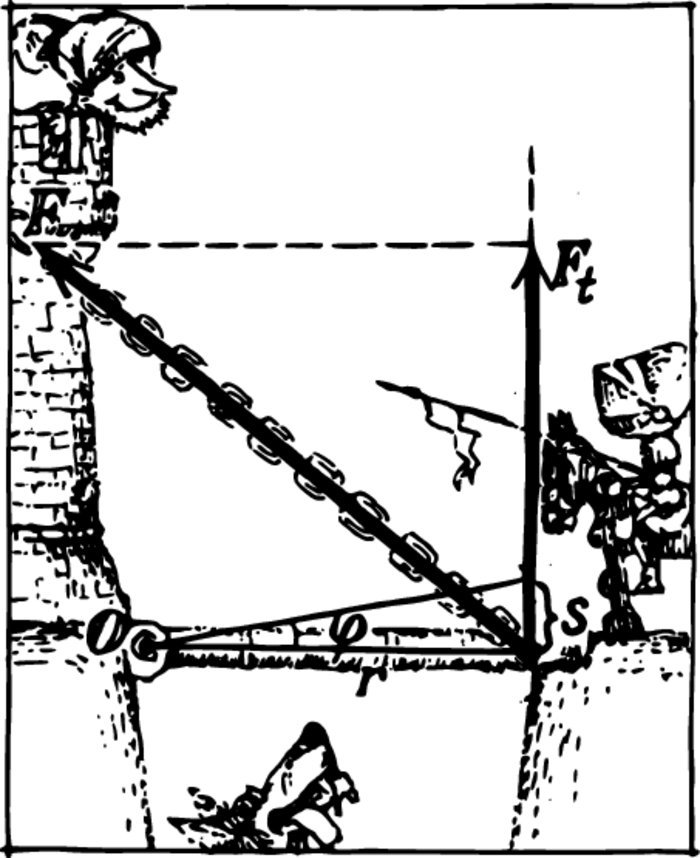
Projecting the force onto the direction of the motion, i.e. onto the tangent to the circle around which the point of application moves, we find a familiar expression for the work \(W\): \[W = F_{t} \, s\] But the arc \(s\) may be represented as follows: \[s = r \, \varphi\] where \(r\) is the distance from the axis of rotation to the point of application of the force. Thus, \[W = F_{t} \, r \varphi\] Turning the body through one and the same angle in various ways, we may expend different amounts of work depending on where the force is applied.
If the angle is given, the work is determined by the product \(F_{t}r\). This product is called the moment of force, or the torque: \[M = F_{t} \, r\] Our formula for the torque can be given another form. Let \(O\) be the axis of rotation, and \(B\) the point of application of the force Figure 2. The length of the perpendicular dropped from \(O\) to the direction of the force is denoted by \(d\). The two triangles constructed in the figure are similar. Therefore, \[\dfrac{F}{F_{t}} = \dfrac{r}{d} \quad \textrm{or} \quad F_{t} \, r = F \, d\] The quantity \(d\) is called the arm, or the lever arm, of the force.
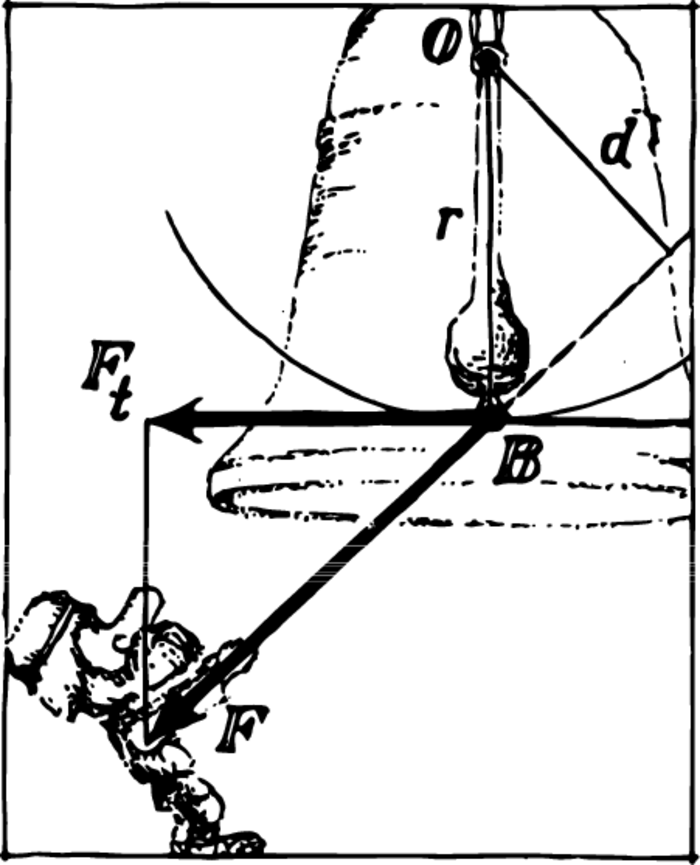
Our new formula \(M = F \, d\) reads as follows: the torque is equal to the product of the force by its lever arm.
If we displace the point of application of the force along its direction, then the lever arm \(d\) and with it the torque \(M\) will not be changed. Hence, it makes no difference just where the point of application lies on the line of action of the force.
With the aid of the new concept, the formula for the work can be written out more concisely. \[W = M \varphi\] i.e. the work is equal to the product of the torque by the angle of rotation.
Let two forces act on a body with moments \(M_{1}\) and \(M_{2}\). When the body is rotated through an angle \(\varphi\) the work done will be \[M_{1}\varphi + M_{2}\varphi = (M_{1} + M_{2})\, \varphi\] This equality shows that two forces with moments \(M_{1}\) and \(M_{2}\) rotate a body just as a single force with moment \(M = M_{1} + M_{2}\) would. Moments of force can help, as well as hinder, each other. If torques \(M_{1}\) and \(M_{2}\) tend to rotate a body in one and the same direction, we should regard them as magnitudes having the same sign. On the contrary, torques rotating a body in opposite directions have different signs.
As we know, the work done by all the forces acting on a body effects a change in its kinetic energy.
The rotation of a body slowed down or speeded up, hence, its kinetic energy changed. This can only take place in case the resultant torque is not equal to zero.
And what if the resultant torque is equal to zero? The answer is obvious—the kinetic energy does not change; consequently, the body either rotates uniformly by inertia or remains stationary
Thus, the equilibrium of a body capable of rotating requires the balancing of all the torques acting on it. If there are two such torques, the equilibrium requires that \[M_{1} + M_{2} = 0\] While we were interested in problems in which a body could be regarded as a point, the conditions for equilibrium were simple: in order for a body to remain stationary or move uniformly, stated Newton’s law for such problems, it is necessary that the resultant force be equal to zero; the forces acting upwards must balance those directed downwards; the rightward force must compensate for the leftward one.
This law is also valid for our case. If a flywheel is stationary, the forces acting on it are balanced by the reaction of the axle around which the wheel can turn.
But these necessary conditions become insufficient. Besides the balancing of forces, the balancing of torques is also required. The balancing of moments of force is the second necessary condition for the rest or uniform rotation of a solid body.
Torques, if there are several of them, can be easily separated into two groups: some tend to rotate a body clockwise, and others counterclockwise. These are precisely the moments of force which must compensate for each other.
" style="fill: %2300a1ff"/>%0A </g>%0A <g id="patch_3">%0A <path d="M 367.323255 30.020542 %0AL 391.543219 30.020542 %0AL 277.440506 212.584882 %0AL 253.220542 212.584882 %0Az%0A" clip-path="url(%23p7d9eacca36)" style="fill: %2300a1ff"/>%0A </g>%0A <g id="patch_4">%0A <path d="M 369.163993 30.020542 %0AL 389.702481 30.020542 %0AL 389.702481 212.584882 %0AL 369.163993 212.584882 %0Az%0A" clip-path="url(%23p7d9eacca36)" style="fill: %2300a1ff"/>%0A </g>%0A <g id="patch_5">%0A <path d="M 322.381881 111.033468 %0AL 436.484593 111.033468 %0AL 436.484593 131.571957 %0AL 322.381881 131.571957 %0Az%0A" clip-path="url(%23p7d9eacca36)" style="fill: %2300a1ff"/>%0A </g>%0A <g id="patch_6">%0A <path d="M 367.323255 30.020542 %0AL 391.543219 30.020542 %0AL 448.594575 121.302712 %0AL 424.374611 121.302712 %0Az%0A" clip-path="url(%23p7d9eacca36)" style="fill: %2300a1ff"/>%0A </g>%0A <g id="patch_7">%0A <path d="M 367.323255 30.020542 %0AL 391.543219 30.020542 %0AL 310.271899 121.302712 %0AL 334.491863 121.302712 %0Az%0A" clip-path="url(%23p7d9eacca36)" style="fill: %2300a1ff"/>%0A </g>%0A <g id="patch_8">%0A <path d="M 424.374611 121.302712 %0AL 448.594575 121.302712 %0AL 391.543219 212.584882 %0AL 367.323255 212.584882 %0Az%0A" clip-path="url(%23p7d9eacca36)" style="fill: %2300a1ff"/>%0A </g>%0A <g id="patch_9">%0A <path d="M 334.491863 121.302712 %0AL 310.271899 121.302712 %0AL 367.323255 212.584882 %0AL 391.543219 212.584882 %0Az%0A" clip-path="url(%23p7d9eacca36)" style="fill: %2300a1ff"/>%0A </g>%0A <g id="patch_10">%0A <path d="M 512.492094 212.584882 %0AL 533.030582 212.584882 %0AL 533.030582 30.020542 %0AL 512.492094 30.020542 %0Az%0A" clip-path="url(%23p7d9eacca36)" style="fill: %2300a1ff"/>%0A </g>%0A <g id="patch_11">%0A <path d="M 539.876745 212.584882 %0AL 539.876745 30.020542 %0AL 636.864051 30.020542 %0AQ 653.979458 30.020542 653.979458 47.135949 %0AL 653.979458 195.469476 %0AQ 653.979458 212.584882 636.864051 212.584882 %0Az%0AM 560.415233 111.033468 %0AL 624.883266 111.033468 %0AQ 633.440969 111.033468 633.440969 102.475765 %0AL 633.440969 59.116734 %0AQ 633.440969 50.559031 624.883266 50.559031 %0AL 560.415233 50.559031 %0Az%0AM 560.415233 192.046394 %0AL 624.883266 192.046394 %0AQ 633.440969 192.046394 633.440969 183.488691 %0AL 633.440969 140.12966 %0AQ 633.440969 131.571957 624.883266 131.571957 %0AL 560.415233 131.571957 %0Az%0A" clip-path="url(%23p7d9eacca36)" style="fill: %2300a1ff"/>%0A </g>%0A <g id="text_1">%0A <g style="fill: %2300a1ff" transform="translate(27.149522 312.323656) scale(0.76 -0.76)">%0A <defs>%0A <path id="Inter-Regular-41" d="M 755 0 %0AL 1223 1318 %0AL 3105 1318 %0AL 3573 0 %0AL 4164 0 %0AL 2455 4655 %0AL 1873 4655 %0AL 164 0 %0AL 755 0 %0Az%0AM 1400 1818 %0AL 2146 3918 %0AL 2182 3918 %0AL 2927 1818 %0AL 1400 1818 %0Az%0A" transform="scale(0.015625)"/>%0A </defs>%0A <use xlink:href="%23Inter-Regular-41"/>%0A </g>%0A </g>%0A <g id="text_2">%0A <g style="fill: %2300a1ff" transform="translate(87.183803 312.323656) scale(0.76 -0.76)">%0A <defs>%0A <path id="Inter-Regular-44" d="M 2000 0 %0AC 3418 0 4218 882 4218 2336 %0AC 4218 3782 3418 4655 2064 4655 %0AL 564 4655 %0AL 564 0 %0AL 2000 0 %0Az%0AM 1127 500 %0AL 1127 4155 %0AL 2027 4155 %0AC 3118 4155 3673 3464 3673 2336 %0AC 3673 1200 3118 500 1964 500 %0AL 1127 500 %0Az%0A" transform="scale(0.015625)"/>%0A </defs>%0A <use xlink:href="%23Inter-Regular-44"/>%0A </g>%0A </g>%0A <g id="text_3">%0A <g style="fill: %2300a1ff" transform="translate(150.459958 312.323656) scale(0.76 -0.76)">%0A <use xlink:href="%23Inter-Regular-41"/>%0A </g>%0A </g>%0A <g id="text_4">%0A <g style="fill: %2300a1ff" transform="translate(213.676738 312.323656) scale(0.76 -0.76)">%0A <defs>%0A <path id="Inter-Regular-50" d="M 564 0 %0AL 1127 0 %0AL 1127 1700 %0AL 2146 1700 %0AC 3230 1700 3718 2359 3718 3182 %0AC 3718 4005 3230 4655 2136 4655 %0AL 564 4655 %0AL 564 0 %0Az%0AM 1127 2200 %0AL 1127 4155 %0AL 2118 4155 %0AC 2875 4155 3164 3741 3164 3182 %0AC 3164 2623 2875 2200 2127 2200 %0AL 1127 2200 %0Az%0A" transform="scale(0.015625)"/>%0A </defs>%0A <use xlink:href="%23Inter-Regular-50"/>%0A </g>%0A </g>%0A <g id="text_5">%0A <g style="fill: %2300a1ff" transform="translate(275.064768 312.323656) scale(0.76 -0.76)">%0A <defs>%0A <path id="Inter-Regular-54" d="M 309 4155 %0AL 1773 4155 %0AL 1773 0 %0AL 2336 0 %0AL 2336 4155 %0AL 3800 4155 %0AL 3800 4655 %0AL 309 4655 %0AL 309 4155 %0Az%0A" transform="scale(0.015625)"/>%0A </defs>%0A <use xlink:href="%23Inter-Regular-54"/>%0A </g>%0A </g>%0A <g id="text_6">%0A <g style="fill: %2300a1ff" transform="translate(351.076861 312.323656) scale(0.76 -0.76)">%0A <defs>%0A <path id="Inter-Regular-49" d="M 1127 4655 %0AL 564 4655 %0AL 564 0 %0AL 1127 0 %0AL 1127 4655 %0Az%0A" transform="scale(0.015625)"/>%0A </defs>%0A <use xlink:href="%23Inter-Regular-49"/>%0A </g>%0A </g>%0A <g id="text_7">%0A <g style="fill: %2300a1ff" transform="translate(397.080829 312.323656) scale(0.76 -0.76)">%0A <defs>%0A <path id="Inter-Regular-56" d="M 755 4655 %0AL 164 4655 %0AL 1873 0 %0AL 2455 0 %0AL 4164 4655 %0AL 3573 4655 %0AL 2191 736 %0AL 2136 736 %0AL 755 4655 %0Az%0A" transform="scale(0.015625)"/>%0A </defs>%0A <use xlink:href="%23Inter-Regular-56"/>%0A </g>%0A </g>%0A <g id="text_8">%0A <g style="fill: %2300a1ff" transform="translate(461.704796 312.323656) scale(0.76 -0.76)">%0A <defs>%0A <path id="Inter-Regular-45" d="M 564 0 %0AL 3409 0 %0AL 3409 500 %0AL 1127 500 %0AL 1127 2082 %0AL 3227 2082 %0AL 3227 2582 %0AL 1127 2582 %0AL 1127 4155 %0AL 3373 4155 %0AL 3373 4655 %0AL 564 4655 %0AL 564 0 %0Az%0A" transform="scale(0.015625)"/>%0A </defs>%0A <use xlink:href="%23Inter-Regular-45"/>%0A </g>%0A </g>%0A <g id="text_9">%0A <g style="fill: %23ffffff" transform="translate(583.014294 312.323656) scale(0.76 -0.76)">%0A <defs>%0A <path id="Inter-Regular-42" d="M 564 0 %0AL 2246 0 %0AC 3346 0 3800 536 3800 1236 %0AC 3800 1973 3291 2373 2864 2400 %0AL 2864 2445 %0AC 3264 2555 3618 2818 3618 3418 %0AC 3618 4100 3164 4655 2191 4655 %0AL 564 4655 %0AL 564 0 %0Az%0AM 1127 500 %0AL 1127 2118 %0AL 2273 2118 %0AC 2882 2118 3264 1709 3264 1236 %0AC 3264 827 2982 500 2246 500 %0AL 1127 500 %0Az%0AM 1127 2609 %0AL 1127 4155 %0AL 2191 4155 %0AC 2809 4155 3082 3827 3082 3418 %0AC 3082 2927 2682 2609 2173 2609 %0AL 1127 2609 %0Az%0A" transform="scale(0.015625)"/>%0A </defs>%0A <use xlink:href="%23Inter-Regular-42"/>%0A </g>%0A </g>%0A <g id="text_10">%0A <g style="fill: %23ffffff" transform="translate(640.459824 312.323656) scale(0.76 -0.76)">%0A <defs>%0A <path id="Inter-Regular-4f" d="M 4491 2327 %0AC 4491 3800 3627 4718 2436 4718 %0AC 1246 4718 382 3800 382 2327 %0AC 382 855 1246 -64 2436 -64 %0AC 3627 -64 4491 855 4491 2327 %0Az%0AM 3946 2327 %0AC 3946 1118 3282 464 2436 464 %0AC 1591 464 927 1118 927 2327 %0AC 927 3536 1591 4191 2436 4191 %0AC 3282 4191 3946 3536 3946 2327 %0Az%0A" transform="scale(0.015625)"/>%0A </defs>%0A <use xlink:href="%23Inter-Regular-4f"/>%0A </g>%0A </g>%0A <g id="text_11">%0A <g style="fill: %23ffffff" transform="translate(702.115042 312.323656) scale(0.76 -0.76)">%0A <use xlink:href="%23Inter-Regular-4f"/>%0A </g>%0A </g>%0A <g id="text_12">%0A <g style="fill: %23ffffff" transform="translate(767.92651 312.323656) scale(0.76 -0.76)">%0A <defs>%0A <path id="Inter-Regular-4b" d="M 564 0 %0AL 1127 0 %0AL 1127 1509 %0AL 1709 2164 %0AL 3327 0 %0AL 4009 0 %0AL 2055 2555 %0AL 4009 4655 %0AL 3273 4655 %0AL 1182 2345 %0AL 1127 2345 %0AL 1127 4655 %0AL 564 4655 %0AL 564 0 %0Az%0A" transform="scale(0.015625)"/>%0A </defs>%0A <use xlink:href="%23Inter-Regular-4b"/>%0A </g>%0A </g>%0A <g id="text_13">%0A <g style="fill: %23ffffff" transform="translate(830.12204 312.323656) scale(0.76 -0.76)">%0A <defs>%0A <path id="Inter-Regular-53" d="M 3109 3491 %0AL 3655 3491 %0AC 3630 4193 2982 4718 2082 4718 %0AC 1191 4718 491 4200 491 3418 %0AC 491 2791 946 2418 1673 2209 %0AL 2246 2045 %0AC 2736 1909 3173 1736 3173 1273 %0AC 3173 764 2682 427 2036 427 %0AC 1482 427 991 673 946 1200 %0AL 364 1200 %0AC 418 436 1036 -82 2036 -82 %0AC 3109 -82 3718 509 3718 1264 %0AC 3718 2136 2891 2418 2409 2545 %0AL 1936 2673 %0AC 1591 2764 1036 2945 1036 3445 %0AC 1036 3891 1446 4218 2064 4218 %0AC 2627 4218 3055 3950 3109 3491 %0Az%0A" transform="scale(0.015625)"/>%0A </defs>%0A <use xlink:href="%23Inter-Regular-53"/>%0A </g>%0A </g>%0A </g>%0A </g>%0A <defs>%0A <clipPath id="p7d9eacca36">%0A <rect x="7.2" y="7.2" width="892.8" height="371.974843"/>%0A </clipPath>%0A </defs>%0A</svg>%0A)