Coordinates
Table of Contents
- 10.1 INTRODUCTION
- 10.2 LECTURE
- 10.2.1 From Cartesian to Polar: A Coordinate Transformation
- 10.2.2 Complex Numbers: A Multiplicative Framework
- 10.2.3 Taylor Series
- 10.2.4 The Beauty of Euler’s Formula
- 10.2.5 Complex Logarithms and Euler’s Insights
- 10.2.6 Cylindrical Coordinates
- 10.2.7 Spherical Coordinates
- 10.2.8 Coordinate Changes and Partial Derivatives
- 10.2.9 The Jacobian Matrix for Polar Coordinates
- 10.2.10 The Algebra of Complex Transformations
- 10.2.11 Spatial Transformations and the Jacobian
- 10.2.12 Volume Distortion in Spherical Coordinates
- 10.3 EXAMPLES
- 10.4 ILLUSTRATIONS
- EXERCISES
10.1 INTRODUCTION
10.1.1 Algebraic Foundations of Coordinate Systems
Algebra is a powerful tool in geometry. In this lecture we circle back to the concept of coordinates and look also at other coordinate systems. We have introduced space as column vectors like \([1,2,3]^{T}\). We can think of it as an arrow from the origin to the point \((1,2,3)\). One speaks of the numbers appearing in \((1,2,3)\) as coordinates while the entries in \([1,2,3]^{T}\) are components of the vector. Most of the time we do not distinguish between the point \((1,2,3)\) and the vector \([1,2,3]^{T}\) as the two objects can clearly be identified naturally. We look in this lecture also at other coordinates like Polar and spherical coordinates. This will be important when doing integration.
10.2 LECTURE
10.2.1 From Cartesian to Polar: A Coordinate Transformation
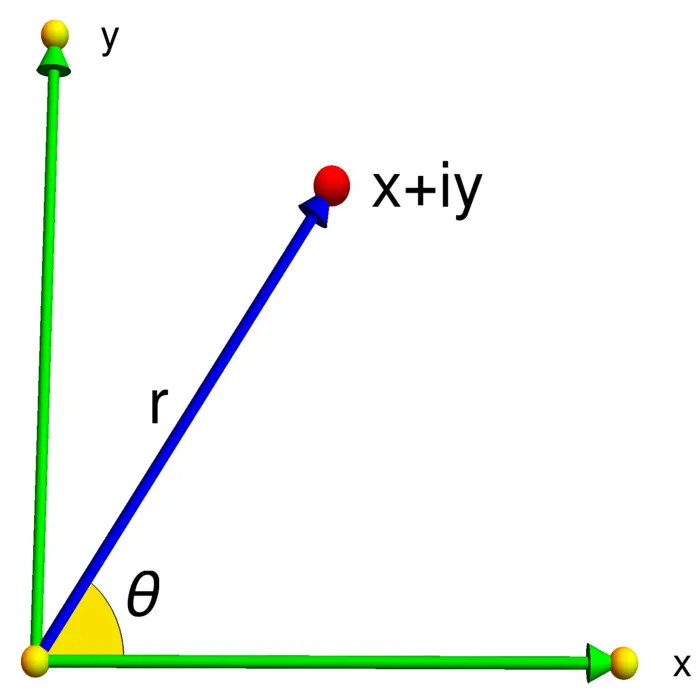
It was René Descartes who in 1637 introduced coordinates and brought algebra close to geometry.1 The Cartesian coordinates \((x, y)\) in \(\mathbb{R}^{2}\) can be replaced by other coordinate systems like polar coordinates \((r, \theta)\), where \(r=\sqrt{x^{2}+y^{2}} \geq 0\) is the radial distance to the \((0,0)\) and \(\theta \in[0,2 \pi)\) is the polar angle made with the positive \(x\)-axis. Since \(\theta\) is in the interval \([0,2 \pi)\), it is best described in the complex notation \(\theta=\arg (x+i y)\). The radius \(r=|z|=\sqrt{x^{2}+y^{2}}\) is the length of the complex number. The conversion from the \((r, \theta)\) coordinates to the \((x, y)\)-coordinates is \[\begin{aligned} x&=r \cos (\theta),\\ y&=r \sin (\theta). \end{aligned}\] The radius is \(r=\sqrt{x^{2}+y^{2}}\), where if non-zero, we always take the positive root. The angle formula \(\arctan (y / x)\) only holds if \(x\) and \(y\) are both positive. The angle \(\theta\) is not uniquely defined at the origin \((0,0)\), most software just assumes \(\arg (0)=0\).
10.2.2 Complex Numbers: A Multiplicative Framework
We can write a vector in \(\mathbb{R}^{2}\) also in the form of a complex number \(z=\) \(x+i y \in \mathbb{C}\) with symbol \(i\). This is not only notational convenience. Complex numbers can be added and multiplied like other numbers and while \(\mathbb{R}^{2}=\mathbb{C}\), the later has a multiplicative structure. In order to fix that structure, one only needs to specify that \(i^{2}=-1\). This gives \[(a+i b)(c+i d)=a c-b d+i(a d+b c).\] We also have \[|a+i b|=\sqrt{(a+i b)(a-i b)}=\sqrt{a^{2}+b^{2}}.\] An important formula of Euler link the exponential and trigonometric functions:
Theorem 1. \(e^{i \theta}=\cos (\theta)+i \sin (\theta)\).
Proof. The proof is to write the series definition on both sides. First recall the definitions of \[e^{x}=1+x+x^{2} / 2 !+x^{3} / 3 !+\cdots.\] If we plug in \(x=i \theta\) we get \[e^{i \theta}=1+i \theta-\theta^{2} / 2 !-i \theta^{3} / 3 !+\theta^{4} / 4! -\cdots\] But this is \[\left(1-\theta^{2} / 2+\theta^{4} / 4 ! -\cdots\right)+i\left(\theta-\theta^{3} / 3 !+\theta^{5} / 5 !-\cdots\right)\] which is \(\cos (\theta)+i \sin (\theta)\). ◻
10.2.3 Taylor Series
If you prefer not to see the functions \(\exp\), \(\sin\), \(\cos\) being defined as series, you can see them as Taylor series \[f(x)=f(0)+f^{\prime}(0) x+f^{\prime \prime}(0) / 2 ! x^{2}+\cdots=\sum_{k=0}^{\infty}\left(f^{(k)}(0) / k !\right) x^{k}.\] By differentiating the functions at \(0\), we see then the connection.
10.2.4 The Beauty of Euler’s Formula
The Euler formula implies for \(\theta=\pi\) the magical formula
Theorem 2. \(e^{i \pi}+1=0\).
This formula is often voted the "nicest formula in math".2 It combines "analysis" in the form \(e\), "geometry" in the form of \(\pi\), "algebra" in the form of \(i\), the additive unit \(0\) and the multiplicative unit \(1\).
10.2.5 Complex Logarithms and Euler’s Insights
The Euler formula allows to write any complex number as \(z=r e^{i \theta}\). Given an other complex number \(w=s e^{i \phi}\) we have \(z w=r s e^{i \theta+\phi}\) showing that the polar angles add and the radius multiplies. The Euler formula also allows to define the logarithm of any complex number as \[\log (z)=\log (|z|)+i \arg (z)=\log (r)+i \theta.\] We see now that going from \((x, y)\) to \((\log (r), \theta)\) is a very natural transformation from \(\mathbb{C} \backslash 0\) to \(\mathbb{C}\). The exponential function \(\exp : z \rightarrow e^{z}\) is a map from \(\mathbb{C} \rightarrow \mathbb{C} \backslash 0\). It transforms the additive structure on \(\mathbb{C}\) to the multiplicative structure because \(\exp (z+w)=\exp (z) \exp (w)\).
10.2.6 Cylindrical Coordinates
In three dimensions, we can look at cylindrical coordinates \((r, \theta, z)\) which are just polar coordinates in the first two coordinates. A cylinder of radius \(2\) for example is given as \(r=2\). The torus \[(3+x^{2}+y^{2}+z^{2})^{2}-16(x^{2}+y^{2})=0\] can be written as \(3+r^{2}+z^{2}=4 r\) or more intuitively as \((r-2)^{2}+z^{2}=1\), a circle in the \(rz\)-plane.
10.2.7 Spherical Coordinates
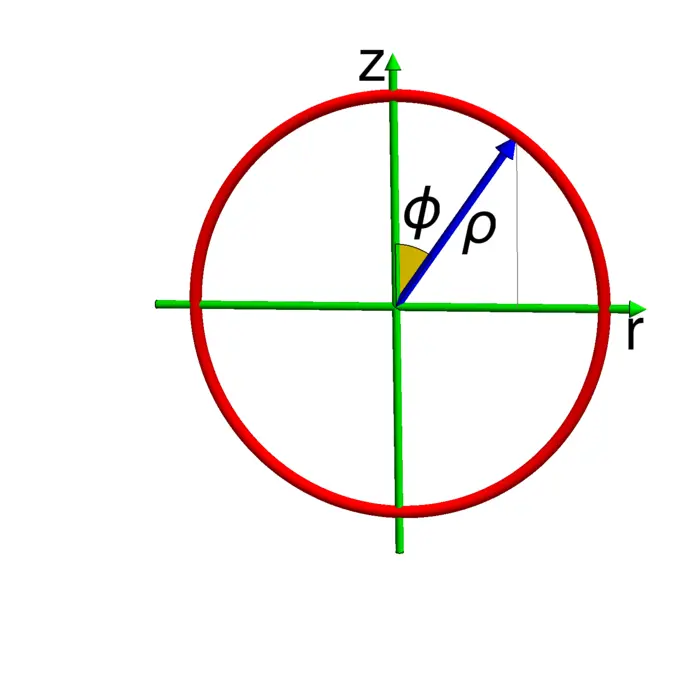
The spherical coordinates \((\rho, \theta, \phi)\), where \(\rho=\sqrt{x^{2}+y^{2}+z^{2}}\). The angle \(\theta\) is the polar angle as in cylindrical coordinates and \(\phi\) is the angle between the point \((x, y, z)\) and the \(z\)-axis. We have \[\begin{aligned} \cos (\phi)&=[x, y, z] \cdot[0,0,1] /\big|[x, y, z]\big|=z / \rho,\\ \sin (\phi)&=\big|[x, y, z] \times[0,0,1]\big| /\big|[x, y, z]\big|=r / \rho \end{aligned}\] so that \(z=\rho \cos (\phi)\) and \(r=\rho \sin (\phi)\) and therefore \[\begin{aligned} & x=\rho \sin (\phi) \cos (\theta) \\ & y=\rho \sin (\phi) \sin (\theta) \\ & z=\rho \cos (\phi) \end{aligned}\] where \(0 \leq \theta<2 \pi\), \(0 \leq \phi \leq \pi\), and \(\rho \geq 0\).
10.2.8 Coordinate Changes and Partial Derivatives
A coordinate change \(x \rightarrow f(x)\) in the plane is a map \(f: \mathbb{R}^{2} \rightarrow \mathbb{R}^{2}\). A point \((x_{1}, x_{2})\) is mapped into \((f_{1}, f_{2})\). We write \(\partial_{x_{k}}\) for the partial derivative with respect to the variable \(x_{k}\). For example \(\partial_{x_{1}}(x_{1}^{2} x_{2}+3 x_{1} x_{2}^{3})=2 x_{1} x_{2}+3 x_{2}^{3}\).
\[f\left[\begin{array}{l} x_{1} \\ x_{2} \end{array}\right]=\left[\begin{array}{l} f_{1}\left(x_{1}, x_{2}\right) \\ f_{2}\left(x_{1}, x_{2}\right) \end{array}\right], \quad d f\left[\begin{array}{l} x_{1} \\ x_{2} \end{array}\right]=\left[\begin{array}{ll} \partial_{x_{1}} f_{1}(x) & \partial_{x_{2}} f_{1}(x) \\ \partial_{x_{1}} f_{2}(x) & \partial_{x_{2}} f_{2}(x) \end{array}\right],\] where \(d f\) is a matrix called the Jacobian matrix. The determinant is called the distortion factor at \(x=\left(x_{1}, x_{2}\right)\).
10.2.9 The Jacobian Matrix for Polar Coordinates
For polar coordinates, we get
\[f\left[\begin{array}{l} r \\ \theta \end{array}\right]=\left[\begin{array}{l} r \cos (\theta) \\ r \sin (\theta) \end{array}\right], \quad d f\left[\begin{array}{l} r \\ \theta \end{array}\right]=\left[\begin{array}{rr} \cos (\theta) & -r \sin (\theta) \\ \sin (\theta) & r \cos (\theta) \end{array}\right].\] Its distortion factor of the Polar map is \(r\). We will use this when integrating in polar coordinates.
10.2.10 The Algebra of Complex Transformations
If \(f(z)=z^{2}+c\) with \(c=a+i b, z=x+i y\) is written as \[f(x, y)=(x^{2}-y^{2}+a, 2 x y+b),\] then \(d f\) is a \(2 \times 2\) rotation dilation matrix which corresponds to the complex number \(f^{\prime}(z)=2 z\). The algebra \(\mathbb{C}\) is the same as the algebra of rotation dilation matrices.
10.2.11 Spatial Transformations and the Jacobian
A coordinate change \(x \rightarrow f(x)\) in space is a map \(f: \mathbb{R}^{3} \rightarrow \mathbb{R}^{3}\). We compute \[f\left[\begin{array}{l} x_{1} \\ x_{2} \\ x_{3} \end{array}\right]=\left[\begin{array}{l} f_{1}(x) \\ f_{2}(x) \\ f_{3}(x) \end{array}\right], \quad d f\left[\begin{array}{l} x_{1} \\ x_{2} \\ x_{3} \end{array}\right]=\left[\begin{array}{lll} \partial_{x_{1}} f_{1}(x) & \partial_{x_{2}} f_{1}(x) & \partial_{x_{3}} f_{1}(x) \\ \partial_{x_{1}} f_{2}(x) & \partial_{x_{2}} f_{2}(x) & \partial_{x_{3}} f_{2}(x) \\ \partial_{x_{1}} f_{3}(x) & \partial_{x_{2}} f_{3}(x) & \partial_{x_{3}} f_{3}(x) \end{array}\right].\]
We wrote \(x=(x_{1}, x_{2}, x_{3})\). Its determinant \(\operatorname{det}(d T)(x)\) is a volume distortion factor.
10.2.12 Volume Distortion in Spherical Coordinates
For spherical coordinates, we have \[\begin{aligned} f\left[\begin{array}{l}\rho \\ \phi \\ \theta\end{array}\right]&=\left[\begin{array}{c}\rho \sin (\phi) \cos (\theta) \\ \rho \sin (\phi) \sin (\theta) \\ \rho \cos (\phi)\end{array}\right],\\ d f\left[\begin{array}{l}\rho \\ \phi \\ \theta\end{array}\right]&=\left[\begin{array}{rrr}\sin (\phi) \cos (\theta) & \rho \cos (\phi) \cos (\theta) & -\rho \cos (\phi) \sin (\theta) \\ \sin (\phi) \sin (\theta) & \rho \cos (\phi) \sin (\theta) & \rho \cos (\phi) \cos (\theta) \\ \cos (\phi) & -\rho \sin (\phi) & 0\end{array}\right]. \end{aligned}\] The distortion factor is \(\operatorname{det}(d f(\rho, \phi, \theta))=\rho^{2} \sin (\phi)\).
10.3 EXAMPLES
Example 1. The point \((x, y)=(-1,1)\) corresponds to the complex number \(z=-1+i\). It has the polar coordinates \((r, \theta)=(\sqrt{2}, 3 \pi / 4)\). As we have \(z=r e^{i \theta}\), we check \[z^{2}=(-1+i)(-1+i)=-2 i\] which agrees with \[\left(r e^{i \theta}\right)^{2}=r^{2} e^{2 i \theta}=2 e^{6 \pi i / 4}.\]
Example 2.
- \((x, y, z)=(1,1,-\sqrt{2})\) corresponds to spherical coordinates \((\rho, \phi, \theta)=(2,3 \pi / 4, \pi / 4)\).
- The point given in spherical coordinates as \((\rho, \phi, \theta)=(3,0, \pi / 2)\) is the point \((0,3,0)\).
Example 3.
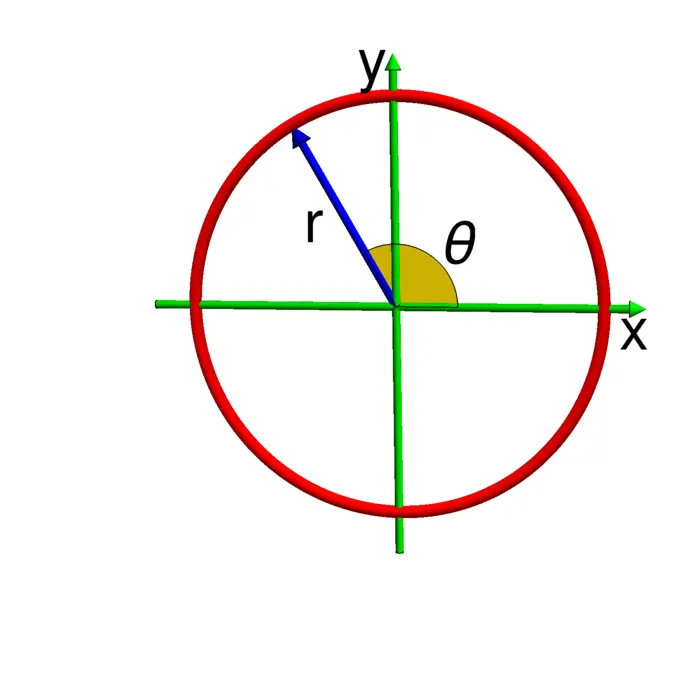
- The set of points with \(r=1\) in \(\mathbb{R}^{2}\) form a circle.
- The set of points with \(\rho=1\) in \(\mathbb{R}^{3}\) form a sphere.
- The set of points with spherical coordinates \(\phi=0\) are points on the positive \(z\)-axis.
- The set of points with spherical coordinates \(\theta=0\) form a half plane in the \(y z\)-plane.
- The set of points with \(\rho=\cos (\phi)\) form a sphere. Indeed, by multiplying both sides with \(\rho\), we get \(\rho^{2}=\rho \cos (\phi)\) which means \(x^{2}+y^{2}+z^{2}=z\), which is after a completion of the square equal to \(x^{2}+y^{2}+(z-1 / 2)^{2}=1 / 4\).
Example 4. For \(A \in M(n, n)\), \(f(x)=A x+b\) has \(d f=A\) and \(\operatorname{distortion}\) factor \(\operatorname{det}(A)\).
Example 5. Find the Jacobian matrix and distortion factor of the map \[f(x_{1}, x_{2})=(x_{1}^{3}+x_{2}, x_{2}^{2}-\sin (x_{1})).\] Answer: Write both the transformation and the Jacobian: \[f\left[\begin{array}{l} x_{1} \\ x_{2} \end{array}\right]=\left[\begin{array}{c} x_{1}^{3}+x_{2} \\ x_{2}^{2}-\sin (x_{1}) \end{array}\right], \quad d f\left[\begin{array}{l} x_{1} \\ x_{2} \end{array}\right]=\left[\begin{array}{cc} 3 x_{1}^{2} & 1 \\ -\cos (x_{1}) & 2 x_{2} \end{array}\right] .\] The Jacobian matrix is \(\operatorname{det}(d f(x))=6 x_{1}^{2} x_{2}+\cos (x_{1})\).
10.4 ILLUSTRATIONS
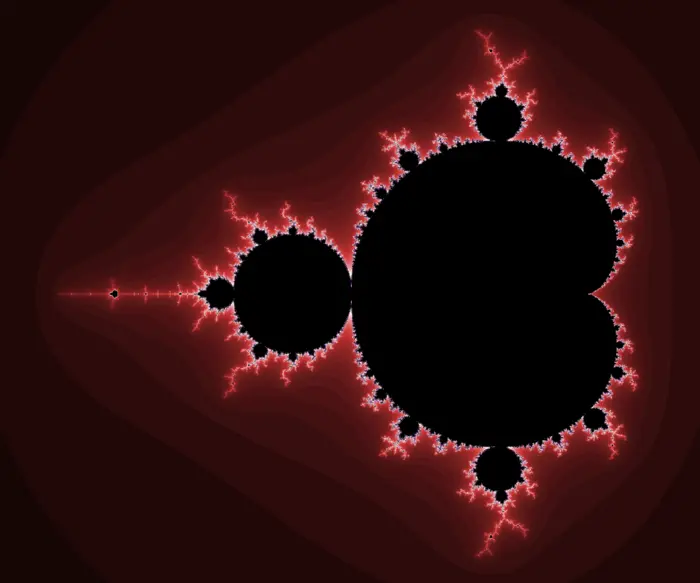
10.4.1 Mandelbrot’s Complexity
Let \(T: \mathbb{C} \rightarrow \mathbb{C}\) be defined as \(z \rightarrow z^{2}+c\), where \(z=x+i y\). The set of all \(c=a+i b\) for which the iterates \(T^{n}(0)\) stay bounded is the Mandelbrot set \(M\). For \(c=-1\) we get \(T(0)=-1\), \(T^{2}(0)=T(-1)=0\) so that \(T^{n}(z)\) is either \(0\) or \(-1\). The point \(c=-1\) is in \(M\). The point \(c=1\) gives \(T(0)=1\), \(T^{2}(0)=1^{2}=1=2\), \(T^{3}(0)=2^{2}+1=5\). Induction shows that \(T^{n}(0)\) does not converge. The point \(c=1\) is not in \(M\).
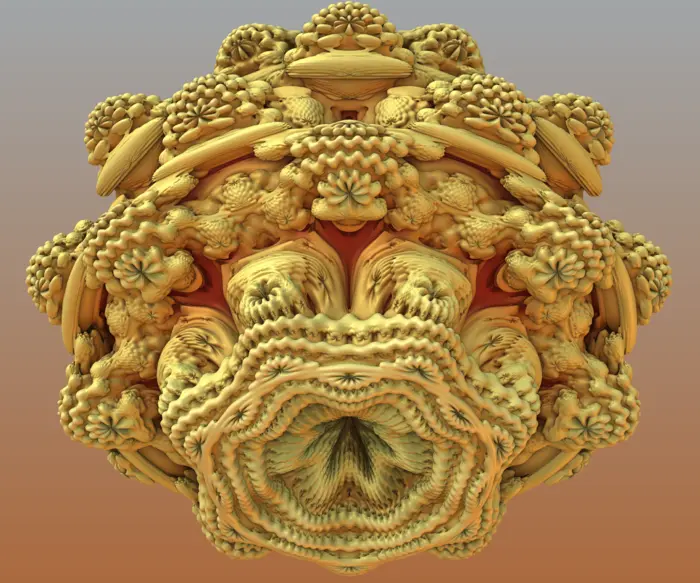
10.4.2 Mandelbrot to Mandelbulb
If \(T\) is the transformation in \(\mathbb{R}^{3}\) which is in spherical coordinates given by \(T(x)=x^{2}+c\), where \(x^{2}\) has spherical coordinates \(\left(\rho^{2}, 2 \phi, 2 \theta\right)\) if \(x\) has \((\rho, \phi, \theta)\). It turns out that \(T(x)=x^{8}+c\) gives a nice analogue of the Mandelbrot set, the Mandelbulb.
EXERCISES
Exercise 1.
- Find the polar coordinates of \((x, y)=(-1, \sqrt{3})\).
- Which point has the polar coordinates \((r, \theta)=(2, \pi / 4)\)?
- Find the spherical coordinates of the point \((x, y, z)=(1,1, \sqrt{2})\).
- Which point has the spherical coordinates \((\rho, \theta, \phi)=(3, \pi / 2, \pi / 3)\)?
Exercise 2.
- Compute \(T_{c}^{n}(0)\) for \(c=(1+i)\) for \(n=1\), \(2\), \(3\). Is \(1+i\) in the Mandelbrot set?
- What is the "eye for an eye" number \(i^{i}\)? (You can use \(z^{w}=e^{w \log (z)}\)).
Exercise 3.
- Which surface is described as \(r=z\)?
- Describe the hyperbola \(x^{2}-y^{2}=5\) in polar coordinates.
- Which surface is described as \(\rho \sin (\phi)=\rho^{2}\)?
- Describe the hyperboloid \(x^{2}+y^{2}-z^{2}=1\) in spherical coordinates.
Exercise 4.
- Compute the Jacobian matrix and distortion factor of the coordinate change \(T(x, y)=(2 x+\sin (x)-y, x)\) (Chirikov map).
- Compute the Jacobian matrix and distortion factor of the coordinate change \(T(x, y)=(1-1.4 x^{2}-y, 0.3 x)\) (Classical Hénon map).
P.S. When you do the coordinate change of the Chiriov map again and again, one can observe chaos. In the case of the Hénon map, one sees a strange attractor, a fractal object which similarly as the Koch curve encountered last week has a dimension larger than \(1\).
Exercise 5.
- Verify that the Mandelbrot set \(M\) is contained in the set \(|c| \leq 2\). As a reminder, this means you have to show that then \[0 \rightarrow c \rightarrow c^{2}+c \rightarrow\left(c^{2}+c\right)^{2}+c \rightarrow \cdots\] escapes to infinity.
- Optional: Use the same argument to see that the Mandelbulb set \(B\) is contained in the set \(|c| \leq 2\).