Équilibre stable, instable et neutre
Pour simplifier, considérons un système au repos à une position d'équilibre, et qui peut se déplacer à partir de cette position d'équilibre dans l'une ou l'autre direction par un seul chemin.
Un tel système est représenté sur la Fig. 1, où quatre configurations d'équilibre différentes d'un cylindre lisse sont illustrées.
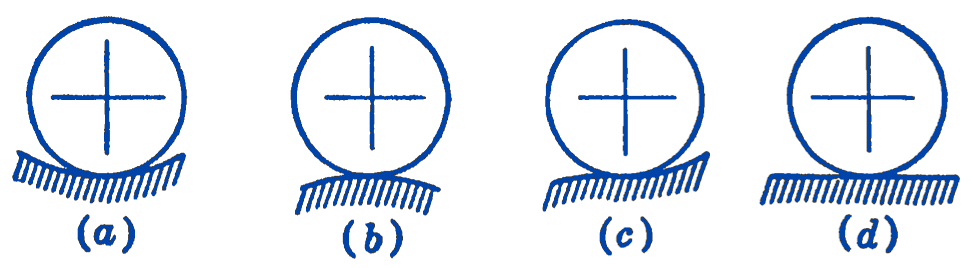
En (a), le cylindre repose sur une surface concave ; en (b) sur une surface convexe ; en (c) sur un point d'inflexion ; et en (d) sur une surface plane. En appliquant le principe des déplacements virtuels, on verra que toutes les quatre positions sont des positions d'équilibre, puisque la seule force active est une force de pesanteur verticale, et puisque le centre de gravité du cylindre se déplace horizontalement pour un déplacement de roulement infinitésimal du cylindre. On peut également relier ces situations au fait que l'énergie potentielle du système doit avoir une valeur stationnaire à la position d'équilibre. En (a), l'énergie potentielle du système est un minimum, car le cylindre est dans sa position la plus basse, et du travail devrait être fourni au cylindre pour le déplacer dans l'une ou l'autre direction. En (b), l'énergie potentielle du système est un maximum, car le cylindre est dans la position la plus haute, et du travail serait fourni par le système lorsqu'il se déplace dans l'une ou l'autre direction. Le point d'inflexion de (c) correspond à une valeur stationnaire, puisque l'énergie potentielle du cylindre n'est ni un maximum ni un minimum.
On reconnaîtra également que les positions représentées sur la Fig. 3-11 sont physiquement quelque peu différentes. En (a), on peut dire que l'on a un équilibre stable, puisque tout mouvement d'éloignement de la position d'équilibre met en place des forces qui ramèneront le système à la position d'équilibre, (b) et (c) sont des exemples d'équilibre instable, puisque tout mouvement d'éloignement de la position d'équilibre met en place des forces qui éloigneront davantage le système de la position d'équilibre, et (d) illustre l'équilibre neutre ou indifférent, dans lequel le mouvement du système à partir de la position d'équilibre n'affecte pas l'équilibre du système.
Nous pouvons donc conclure que la condition d'énergie potentielle maximale correspond à la condition instable, tandis que la condition d'énergie potentielle minimale correspond à la condition stable.
Les considérations ci-dessus peuvent être utilisées pour tester si une position d'équilibre est stable ou instable. Il suffit de noter si l'énergie potentielle du système augmente ou diminue lorsque le système est déplacé de la position d'équilibre.
Les conditions d'équilibre et les tests pour l'équilibre stable et instable peuvent être exprimés analytiquement comme suit. Supposons pour simplifier que nous considérions un système dont le déplacement à partir d'une position d'équilibre peut être décrit par une coordonnée, . Soit cette position d'équilibre, et l'énergie potentielle du système à la position . Maintenant, lorsque varie et que nous nous éloignons de la position d'équilibre, l'énergie potentielle d'un système conservatif sera une certaine fonction de :
Si nous écrivons maintenant le développement en série de Maclaurin de cette fonction autour du point , nous avons :
D'après le théorème des déplacements virtuels, nous savons que le travail effectué par les forces lors d'un déplacement infinitésimal arbitraire à partir du point est nul, si le point est une position d'équilibre. Ainsi, si nous choisissons un déplacement infinitésimal , alors le correspondant serait nul pour l'équilibre. La condition analytique d'équilibre du système au point devient donc :
La variation de l'énergie potentielle du système, dans la région proche de la position d'équilibre, est alors donnée par :
puisque le terme est nul.
Ainsi, en examinant le signe de la dérivée seconde, nous déterminons si l'énergie potentielle augmente ou diminue lorsque nous nous éloignons de la position d'équilibre, et par conséquent si le système est stable ou instable.
D'après les considérations ci-dessus, nous voyons que si les positions d'équilibre peuvent être déterminées par le principe des déplacements virtuels en ne considérant que les termes du premier ordre des petits déplacements, il est nécessaire d'examiner les termes du second ordre pour décider de la stabilité ou de l'instabilité de la position d'équilibre.
| Signe de | Énergie potentielle | Condition d'équilibre |
|---|---|---|
| minimum | stable | |
| maximum | instable |
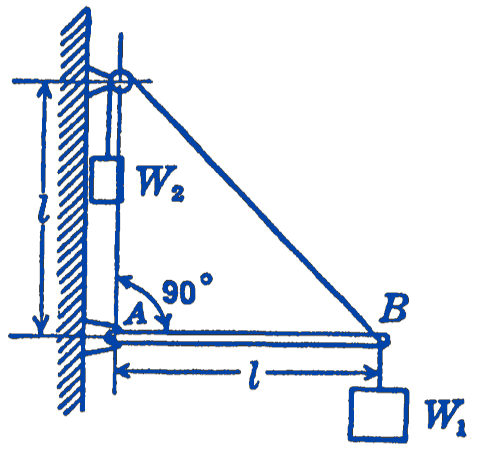
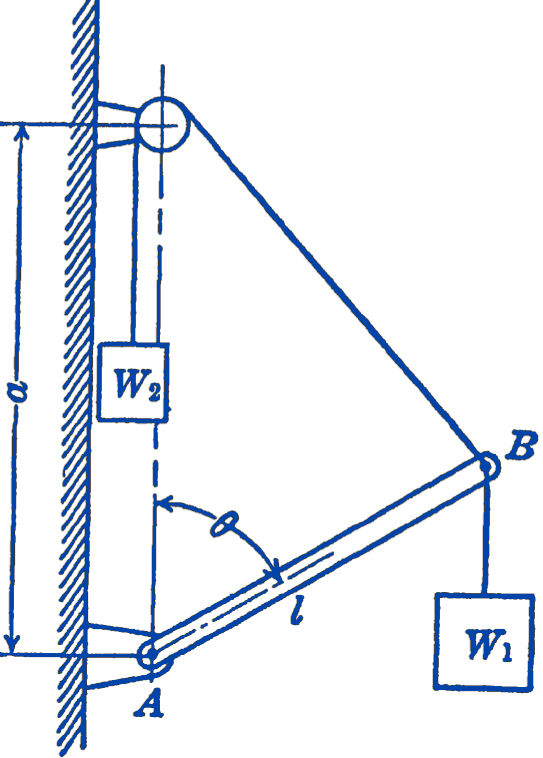
Exemple 1. Un poids est supporté par une barre rigide et sans poids, , et un câble chargé par un poids , comme illustré sur la Fig. 3-12. Trouver la relation entre et pour l'équilibre du système avec la barre en position horizontale, et déterminer si cette position d'équilibre est stable ou instable.
Solution. Nous allons traiter ce problème de deux manières, d'abord par le principe des déplacements virtuels, et ensuite par des considérations d'énergie potentielle.
Première méthode
Nous prenons comme déplacement virtuel du système une petite descente du poids , que nous appellerons . Nous pouvons alors trouver à partir de la géométrie du système la distance de remontée de , .
Cette réponse peut être vérifiée très simplement en égalisant les moments autour du point à zéro, pour l'équilibre.
Afin d'examiner la stabilité de cette position d'équilibre, nous devons voir s'il faut fournir du travail au système pour le déplacer de la position d'équilibre, ou si le système lui-même peut fournir du travail lorsqu'il s'écarte de la position d'équilibre.
Le travail fourni par le système pendant le déplacement à partir de la position d'équilibre est :
Notons que nous n'avons conservé qu'un terme du second ordre , de sorte que les termes du second ordre doivent être retenus pour examiner de tels problèmes de stabilité.
Puisque ce terme de travail est positif, nous voyons que le système lui-même fournit du travail lorsqu'il s'écarte de la position d'équilibre, c.-à-d. que l'énergie potentielle diminuerait, donc la position d'équilibre est instable.
Deuxième méthode
Nous écrivons l'expression de l'énergie potentielle du système dans une région proche de la position d'équilibre : où est le déplacement vers le bas de à partir de la position d'équilibre, et est l'énergie potentielle du système à la position d'équilibre, mesurée à partir d'un niveau arbitraire quelconque.
La condition d'équilibre est :
Le test de stabilité est :
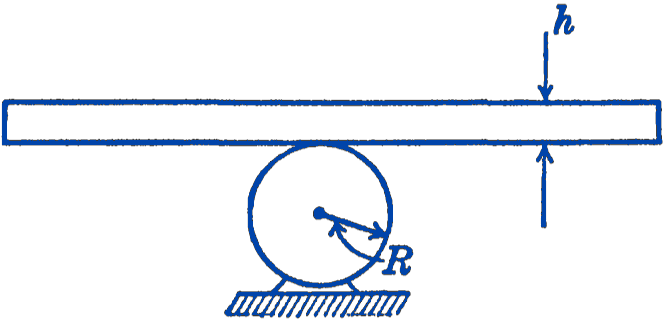
Exemple 2. Une planche uniforme d'épaisseur est équilibrée sur le dessus d'un cylindre circulaire de rayon (Fig. 3). Quelle est la relation entre et pour la stabilité de la position d'équilibre, en supposant que la planche roule sur le cylindre sans glisser ?
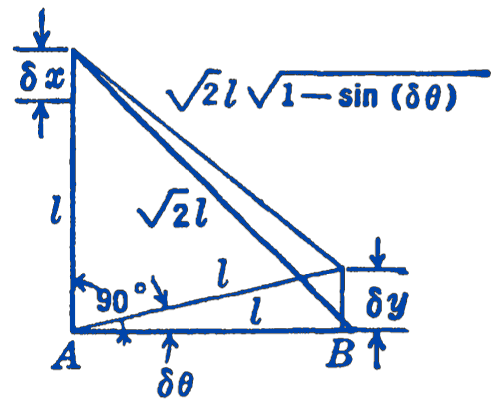
Solution. Considérons un déplacement virtuel du système constitué de la planche roulant sur le cylindre (Fig. 4).
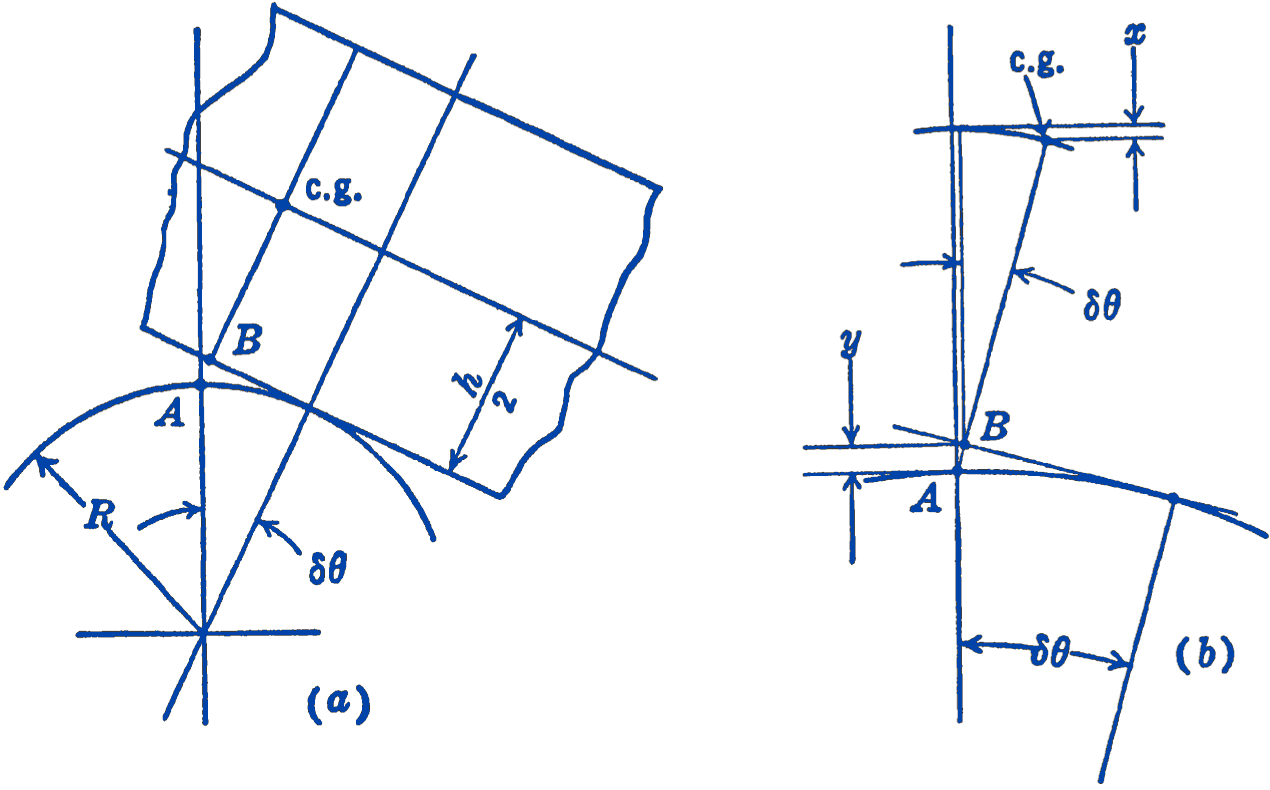
À l'origine, les points et coïncident ; après le déplacement virtuel, les points et prennent les positions indiquées sur les schémas. Nous souhaitons calculer le mouvement vertical total du centre de gravité de la planche pendant le déplacement . Si ce mouvement vertical est vers le haut, la position d'équilibre est stable. Si ce mouvement vertical est vers le bas, l'équilibre est instable. Pour déterminer la condition limite, nous trouvons la relation entre et pour laquelle il n'y aura pas de mouvement vertical du c.d.g. Sur le schéma (b), on verra que le mouvement vertical total peut être considéré comme composé de deux parties, l'une descendante, due à la rotation de la planche, marquée sur le schéma ; et l'autre ascendante due au roulement de la planche, marquée sur le schéma. La condition limite pour l'équilibre stable sera déterminée en égalant ces deux composantes.
D'après la figure, nous avons directement : En conservant les termes du second ordre, mais en négligeant les ordres supérieurs, nous avons :
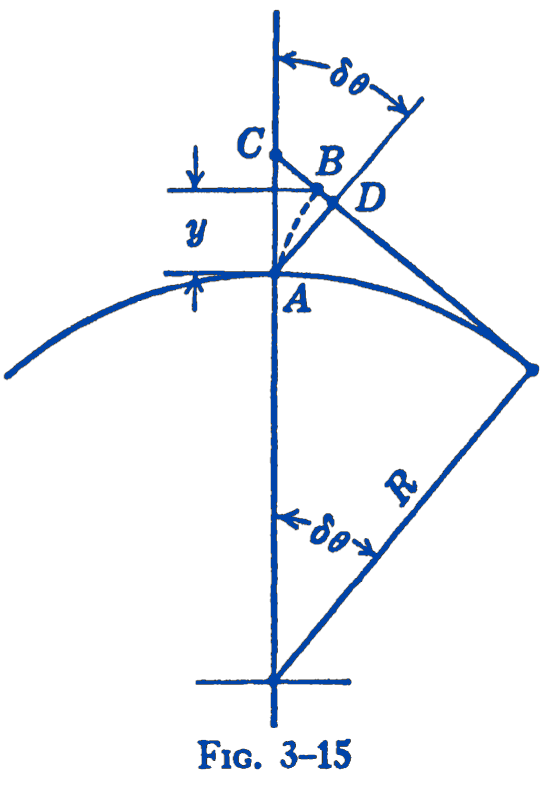
Pour trouver , notez que sur la Fig. 5 la longueur est inférieure à , mais supérieure à la composante verticale de . On peut montrer, cependant, que la différence entre et ) n'implique que des termes d'ordre supérieur à deux, de sorte que si l'on ne conserve que les termes jusqu'au second ordre, on peut dire que .
Par exemple, une planche de d'épaisseur nécessiterait un cylindre de de rayon. Tout cylindre plus petit représenterait un cas d'équilibre instable.
3.6.1 PROBLÈMES
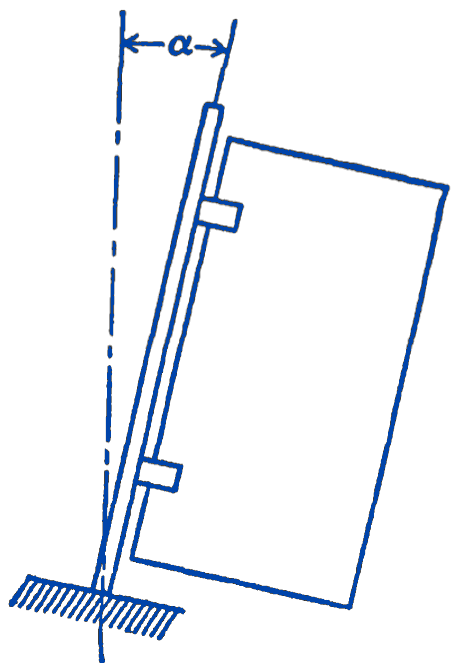
1. Une porte peut pivoter sur autour d'un axe qui fait un angle avec la verticale, comme indiqué sur la figure. Montrer que le système a deux positions d'équilibre, l'une stable et l'autre instable.
2. En se référant au problème précédent, déterminer si la position d'équilibre de la barre uniforme est stable ou instable.
Réponse
Instable
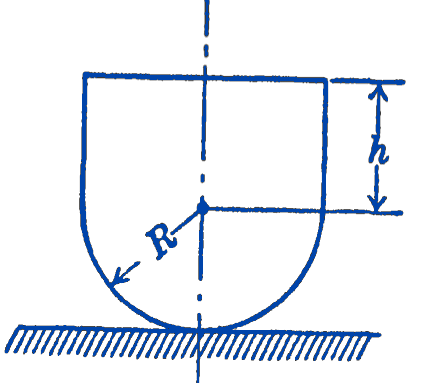
3. Un corps homogène est composé d'un demi-cylindre et d'un parallélépipède rectangle, comme indiqué sur la figure. Trouver la valeur maximale de compatible avec la stabilité du système sur le plan horizontal. On suppose que le cylindre roule sur le plan sans glisser.
Réponse
4. Une barre rigide sans poids supporte un poids et est supportée par un câble chargé par un poids comme indiqué sur la figure. La distance est supérieure à la distance . Trouver toutes les positions d'équilibre possibles du système et examiner leur stabilité.
Réponse
,