Eigenstrains and Residual Stresses
En mécanique des solides, on rencontre souvent des déformations non élastiques. Voici quelques exemples de déformations non élastiques :
Dilatation thermique : Variations réversibles de volume ou de forme provoquées par une augmentation ou une diminution de la température.
Déformations plastiques : Déformations permanentes et irréversibles qui subsistent après la suppression des charges ayant provoqué l'écoulement plastique (souvent causées par le mouvement d’un type de défaut unidimensionnel, appelé dislocations).
Déformations initiales :
Les déformations initiales représentent l’état de déformation qui existe déjà dans un matériau avant que toute nouvelle charge extérieure ou analyse courante ne soit appliquée. On les rencontre généralement à la suite de l’historique de fabrication ou de mise en œuvre du matériau. Plutôt que de simuler l’intégralité du processus de fabrication d’une pièce, les ingénieurs considèrent la déformation résiduelle comme une « déformation initiale » de référence.Déformations de désaccord :
Les déformations de désaccord se produisent à l’échelle microscopique lorsqu’une particule étrangère ou une nouvelle phase se forme à l’intérieur d’un matériau hôte, mais que sa taille géométrique naturelle ou son paramètre de maille ne correspond pas parfaitement à celui du réseau atomique environnant. Comme les deux matériaux sont liés ensemble, ils sont contraints de s’étirer ou de se comprimer pour s’adapter l’un à l’autre.- Exemple : Dans l’aluminium durci par précipitation (comme celui utilisé dans l’aéronautique), les atomes de cuivre se regroupent pour former de minuscules « précipités » au sein du réseau d’aluminium. La distance cristalline naturelle de ces précipités riches en cuivre est légèrement différente de celle de la matrice d’aluminium environnante. La différence purement géométrique entre la taille naturelle du précipité et le « trou » qu’il occupe dans la matrice d’aluminium constitue la déformation de désaccord. Un autre exemple classique est le dopage dans les semi-conducteurs, où le remplacement d’un atome plus gros (comme le phosphore) dans le réseau de silicium crée une déformation de désaccord locale.
Toshio Mura a généralement appelé ces déformations non élastiques des déformations propres. J.D. Eshelby (1957) les désignait à l’origine sous le nom de « déformations sans contrainte ». Certains chercheurs les appellent aussi « déformations intrinsèques ». Dans ce texte, nous utiliserons la terminologie de Mura et noterons le tenseur de déformation propre par .
Lorsque des déformations propres localisées se développent à l'intérieur d'un corps, le principe de compatibilité du continu impose que le matériau ne puisse pas se déchirer ou se chevaucher physiquement. En conséquence, le matériau environnant est contraint de s'étirer, se comprimer ou se plier pour s'adapter à la déformation et assurer une jonction parfaite. Les contraintes internes nécessaires au maintien de cette compatibilité forcée sont appelées contraintes propres. Comme aucune force extérieure n'est appliquée, cet état de contrainte interne doit s'équilibrer parfaitement sur l'ensemble de la pièce, ce qui le rend auto-équilibré. Dans la pratique industrielle, ces contraintes internes auto-équilibrées, résultant généralement des procédés de fabrication ou de l'écoulement plastique, sont plus communément appelées contraintes résiduelles.
(Note : Le préfixe « eigen » vient de l'allemand et signifie « propre » ou « inhérent ». Il est important de préciser que les déformations propres et les contraintes propres n'ont absolument rien à voir avec les valeurs propres mathématiques des tenseurs de déformation ou de contrainte. Comme nous l'avons vu, ces valeurs propres représentent les déformations principales et les contraintes principales, c'est-à-dire les déformations ou contraintes normales dans un système de coordonnées particulier où les composantes de cisaillement sont nulles. Notez que dans les matériaux anisotropes, ces deux systèmes de coordonnées ne sont pas nécessairement alignés.)
Exemple de déformation propre
Supposons que la température d'une inhomogénéité (région Ω) enfermée dans un bloc de matériau plus grand et non contraint augmente de ΔT. L'inhomogénéité « veut » se dilater. Si elle était complètement libre et détachée, elle subirait une déformation thermique purement sans contrainte. Pour un matériau isotrope, cette déformation propre s'écrit :
où α est le coefficient de dilatation thermique et δij est le symbole de Kronecker (qui vaut 1 si i = j, et 0 si i ≠ j). Ceci suppose que la dilatation est uniforme dans toutes les directions normales. Si le matériau est anisotrope, la dilatation dépend de l'orientation, et αδij est remplacé par un tenseur général de dilatation thermique αij.
Déformations propres fictives (La méthode de l'inclusion équivalente)
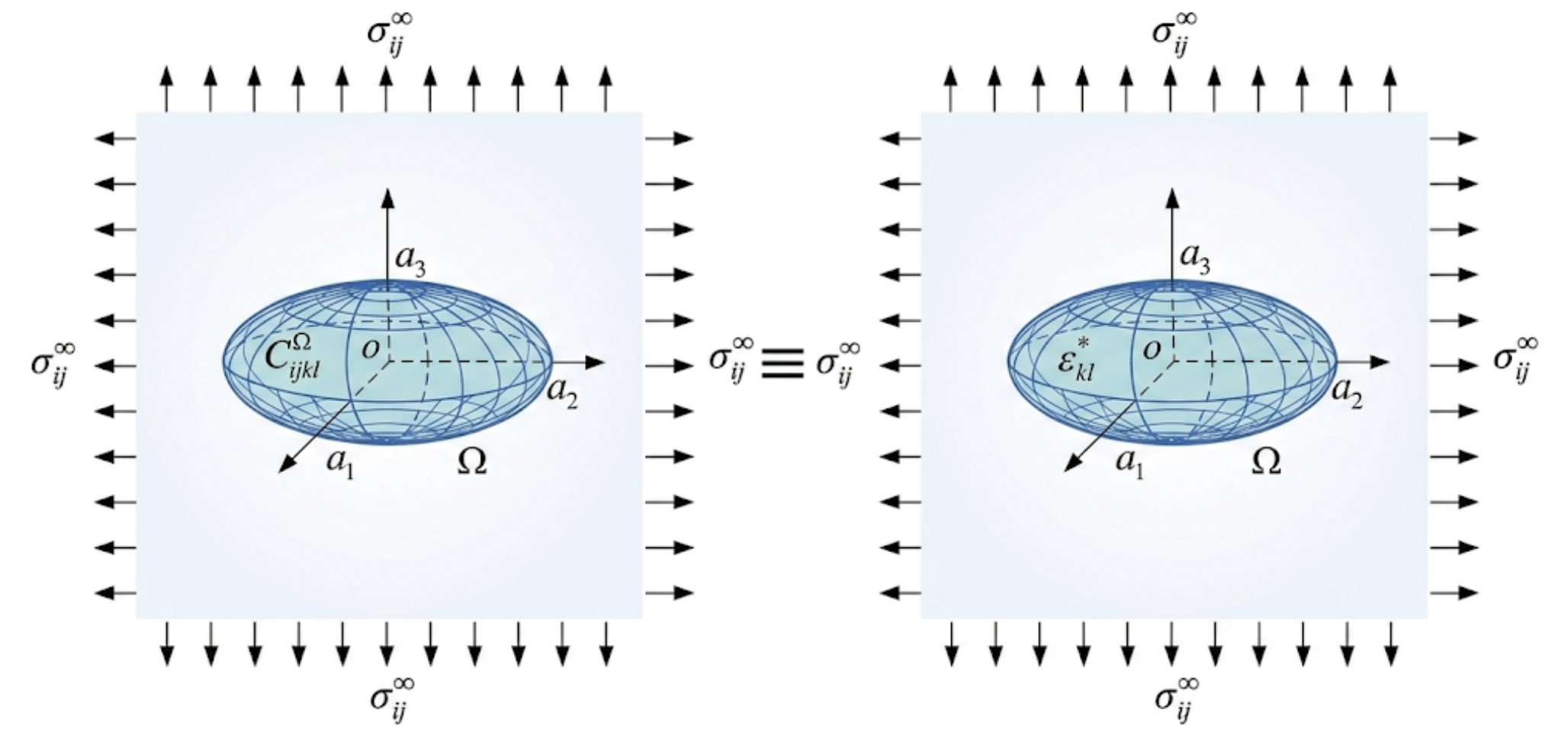
Il est important de noter que les déformations propres ne sont pas toujours des déformations physiques réelles ; elles peuvent également être utilisées comme un outil mathématique très efficace. En micromécanique, les ingénieurs analysent fréquemment des inhomogénéités, des régions à l'intérieur d'un matériau qui possèdent une rigidité élastique différente de celle de la matrice environnante. Le calcul du champ de contrainte autour de ces matériaux non adaptés sous une charge extérieure appliquée est mathématiquement lourd. Cependant, J.D. Eshelby (1957) a proposé une astuce brillante : on peut remplacer mathématiquement la particule « étrangère » par le matériau hôte d'origine, à condition d'introduire dans cette région une déformation propre fictive purement théorique (souvent appelée déformation propre équivalente). Cette déformation propre fictive est calculée avec précision de sorte que les champs de contrainte et de déformation résultants correspondent parfaitement à la réalité de la particule rigide. Ce saut conceptuel, connu sous le nom de méthode de l'inclusion équivalente[1], est une pierre angulaire de la mécanique des composites car il permet aux chercheurs de résoudre des problèmes complexes multi-matériaux en utilisant les équations beaucoup plus simples d'un matériau uniforme et homogène.
La décomposition de la déformation
Lorsqu'on traite des déformations infinitésimales, la déformation totale 𝜖ij peut être décomposée de manière additive en la déformation élastique et la déformation propre :
Il est crucial de bien distinguer ces trois types de déformation :
Déformation totale (𝜖ij) : C'est la déformation géométrique physique réelle du matériau. Comme le matériau doit rester continu (pas de déchirure ni de chevauchement), la déformation totale doit être compatible. Cela signifie qu'elle est directement dérivée d'un champ de déplacement continu ui :
Déformation propre (𝜖*ij) : Le changement de forme inhérent et sans contrainte que le matériau veut subir.
Déformation élastique (𝜖ijel) : La déformation due aux forces appliquées ou aux contraintes internes.
Loi de Hooke avec déformations propres
Dans un matériau élastique linéaire, le tenseur des contraintes est une fonction linéaire de la déformation élastique. On a donc
où Cijkl est le tenseur de rigidité du quatrième ordre.
En substituant la décomposition de la déformation dans cette équation, on obtient la relation entre la contrainte, la déformation totale et la déformation propre :
- En utilisant la notation indicielle où la sommation sur les indices répétés k et l est implicite, les équations ci-dessus en mécanique des solides s'écrivent :
Références
Eshelby, J. D. (1957). La détermination du champ élastique d'une inclusion ellipsoïdale et problèmes connexes. Proceedings of the Royal Society of London. Series A. Mathematical and Physical Sciences, 241(1226), 376–396. https://doi.org/10.1098/rspa.1957.0133
Korsunsky, A. M. (2017). Un essai pédagogique sur les contraintes résiduelles et les déformations propres. Butterworth-Heinemann.
Mura, T. (1987). Micromécanique des défauts dans les solides (2e éd. rév.). Springer.