L'Élément triangulaire bidimensionnel
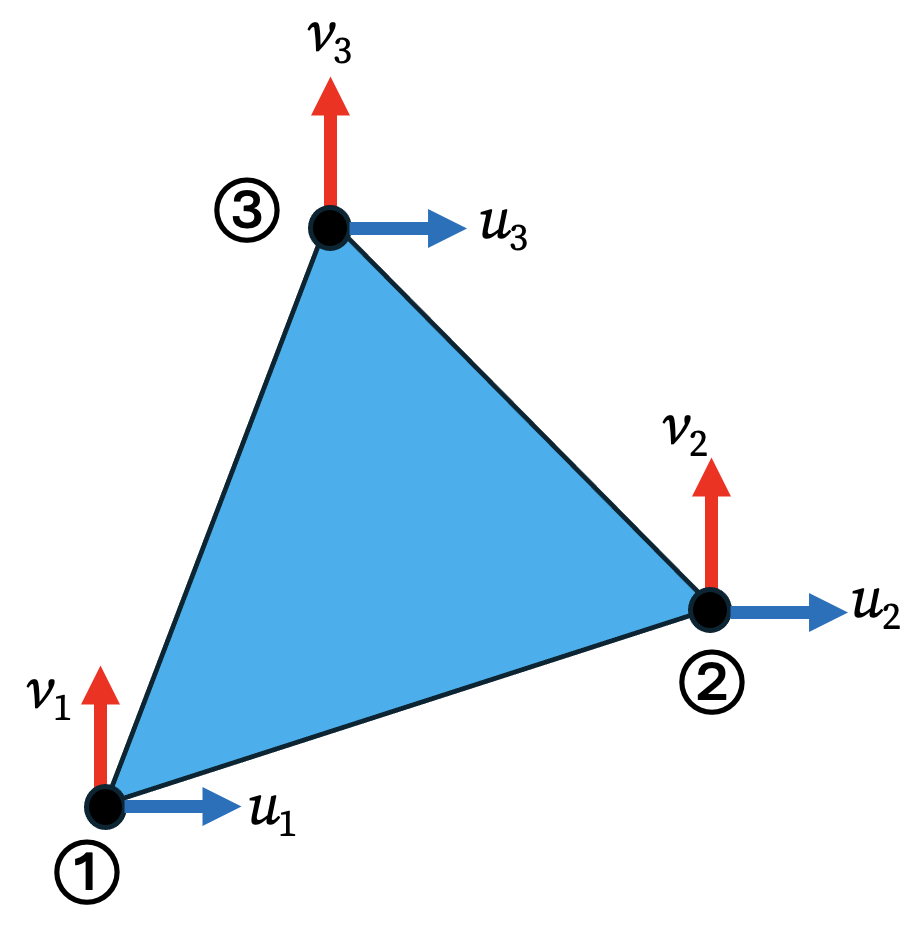
Nous étendons maintenant les principes de la méthode des éléments finis aux domaines bidimensionnels. L’élément le plus simple pour discrétiser un milieu continu 2D est l’élément triangulaire. Considérons trois nœuds situés à chaque sommet du triangle, numérotés dans le sens inverse des aiguilles d’une montre. Chaque nœud possède deux degrés de liberté et .
1. Formulation pour l’élasticité bidimensionnelle
Avant de dériver les propriétés de cet élément, nous devons établir les relations fondamentales de l’élasticité bidimensionnelle.
L’état de contrainte et de déformation en tout point peut être représenté par des vecteurs.
Le vecteur de contrainte de Voigt est défini comme suit :
Le vecteur de déformation de Voigt correspondant est :
La relation entre contrainte et déformation est la loi constitutive qui, pour un matériau élastique linéaire, s’exprime sous forme matricielle par : Ici, E est la matrice d’élasticité, contenant les propriétés du matériau. (Cette matrice ne doit pas être confondue avec le module de Young scalaire, E, utilisé dans sa définition).
Pour les problèmes 2D, on fait généralement l’une des deux hypothèses simplificatrices suivantes : contrainte plane ou déformation plane.
Contrainte plane : Supposée pour les structures minces chargées dans leur plan (). La matrice d’élasticité est :
Déformation plane : Supposée pour les structures longues à section uniforme où la déformation hors plan est nulle (). La matrice d’élasticité est :
2 La matrice déformation‑déplacement [B]
Hypothèses : Le champ de déplacement au sein de l’élément, u(x, y) dans la direction x et v(x, y) dans la direction y, est interpolé à partir des valeurs des déplacements nodaux en utilisant les fonctions de forme Ni. On suppose que le déplacement dans une direction donnée dépend uniquement des déplacements nodaux dans cette même direction. C’est-à-dire,
Les déformations sont les dérivées du champ de déplacement. Pour un problème bidimensionnel, les relations sont :
En substituant les champs de déplacement interpolés dans ces définitions des déformations, nous pouvons construire une relation entre le vecteur de déformation de Voigt et le vecteur des déplacements nodaux . Cette relation définit la matrice déformation‑déplacement, B.
Pour un élément triangulaire à 3 nœuds, le vecteur des déplacements nodaux est ordonné comme suit :
La matrice déformation‑déplacement B est donc une matrice composée des dérivées des fonctions de forme :
3. Dérivation des fonctions de forme
Pour déterminer la matrice B, nous devons d’abord trouver la forme explicite des fonctions de forme, Ni. Pour l’élément triangulaire à 3 nœuds, nous supposons le champ de déplacement le plus simple possible : un polynôme linéaire.
Les coefficients A1, A2 et A3 sont des constantes. Pour les relier aux déplacements nodaux physiques, nous imposons cette équation en chacun des trois nœuds :
Ce système d’équations peut être inversé pour résoudre les coefficients Ai en fonction des déplacements nodaux ui et des coordonnées nodales.
En substituant ces expressions dans le polynôme linéaire et en réarrangeant, on obtient la forme finale des fonctions de forme :
Les fonctions de forme dérivées du champ polynomial linéaire prennent la forme : où A est l’aire de l’élément et ai, bi et ci sont des coefficients composés des coordonnées nodales.
- Notez que Ni(x, y) est l’équation d’un plan dont la valeur est 1 au nœud i et zéro aux deux autres nœuds.
4. La matrice B de déformation constante et la rigidité de l’élément
Les dérivées de ces fonctions de forme sont :
Une conséquence cruciale de la fonction de forme linéaire est que ses dérivées sont constantes. Comme la matrice [B] est entièrement composée de ces dérivées, la matrice [B] de cet élément est également constante. De la relation {ϵ} = [B]{q}, cela implique que la déformation {ϵ} est uniforme dans tout l’élément, d’où son nom de triangle à déformation constante (CST).
La matrice de rigidité élémentaire K est obtenue par intégration sur le domaine de l’élément Ω :
Pour un élément d’épaisseur constante t, cette intégrale de volume devient une intégrale de surface :
Puisque B, E et t sont tous constants, ils peuvent être sortis de l’intégrale, qui se simplifie en l’aire A. On obtient alors l’expression finale de la matrice de rigidité élémentaire :
5. Continuité inter‑éléments et éléments d’ordre supérieur
Une question se pose concernant la continuité du déplacement. Nous savons que le déplacement est continu aux nœuds, mais est-il continu le long des arêtes entre les nœuds ?
La réponse est oui. Étant donné que le champ de déplacement est linéaire, sa variation le long d’une arête quelconque est une interpolation linéaire entre les valeurs nodales des deux coins. Un élément adjacent partageant cette arête aura son champ de déplacement décrit par la même interpolation linéaire. Cela garantit la compatibilité des déplacements entre éléments, condition connue sous le nom de continuité.
La condition de complétude, qui garantit que l’élément peut représenter un mouvement de corps rigide, est satisfaite, comme l’indique la propriété :
La précision de l’élément CST est limitée par son hypothèse de déformation constante. Pour modéliser des problèmes avec des champs de déformation variables de manière plus précise, on utilise des éléments d’ordre supérieur. Cela est réalisé en ajoutant des nœuds à l’élément et en utilisant des polynômes d’ordre supérieur pour les fonctions de forme. Par exemple, l’ajout de nœuds au milieu des arêtes permet d’obtenir un champ de déplacement quadratique (un triangle à 6 nœuds), ce qui donne un champ de déformation variant linéairement.
Ces éléments d’ordre supérieur possèdent toujours uniquement une continuité . Atteindre une continuité plus élevée (par exemple , où les dérivées sont également continues) nécessite des formulations d’éléments plus complexes.