Éléments poutre
Les éléments de poutre sont des composants fondamentaux en analyse structurale, conçus pour modéliser des barres qui résistent aux charges principalement par flexion. Contrairement aux éléments de treillis, qui ne supportent que les efforts axiaux, les éléments de poutre peuvent supporter des charges transversales, qui engendrent des efforts tranchants et des moments fléchissants internes.
1. Fondement théorique : la théorie des poutres d'Euler-Bernoulli
La formulation d'un élément de poutre « classique » standard est basée sur la théorie des poutres d'Euler-Bernoulli. Cette théorie fournit les relations cinématiques essentielles qui relient la déformation de l'élément à ses déformations internes. La théorie repose sur plusieurs hypothèses clés :
- Les sections planes restent planes et perpendiculaires : C'est l'hypothèse la plus cruciale. Elle stipule qu'une section transversale initialement plane et perpendiculaire à l'axe central de la poutre le restera après déformation. Une conséquence majeure est que la déformation due au cisaillement est considérée comme négligeable.
- Petits déplacements et petites rotations : Les flèches et les pentes de la poutre sont supposées petites. Cela permet des approximations linéaires, simplifiant considérablement les mathématiques.
- Matériau élastique linéaire : Le matériau de la poutre est supposé isotrope et obéir à la loi de Hooke, ce qui signifie que la contrainte est directement proportionnelle à la déformation.
À partir de ces hypothèses, nous dérivons l'équation la plus importante pour notre formulation. Cette équation relie la flexion physique de la poutre à la déformation interne subie par ses fibres matérielles.
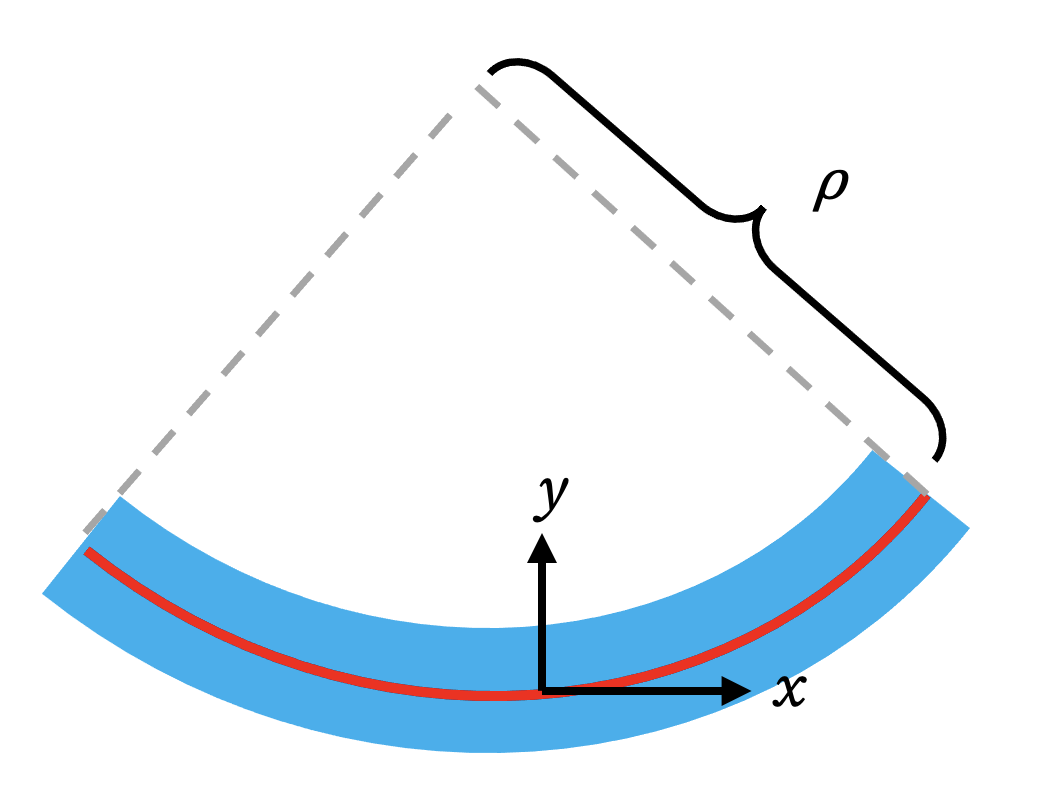
Pour comprendre cela, imaginez la poutre se courbant en un arc lisse. En tout point de sa longueur, on peut approximer cet arc par un cercle « le mieux adapté ». Le rayon de ce cercle est appelé le rayon de courbure, noté ρ (rho).
- Une courbure très douce et légère correspond à un cercle de très grand rayon, donc ρ est grand.
- Une courbure prononcée et serrée correspond à un cercle de petit rayon, donc ρ est petit.
Considérons maintenant la déformation dans une fibre à une distance y de l'axe neutre de la poutre (qui se situe le long du centre de ce cercle). D'après la géométrie de l'arc, la déformation axiale (εxx) est donnée par :
Cette relation simple et puissante montre que la déformation est nulle sur l'axe neutre (y=0), et qu'elle augmente linéairement lorsqu'on s'en éloigne.
Pour des raisons de commodité mathématique en mécanique des structures, il est courant de travailler avec une grandeur appelée courbure, notée κ (kappa) (voir ici). La courbure est simplement l'inverse du rayon de courbure : Cela signifie qu'une courbure douce (grand ρ) a une faible courbure, tandis qu'une courbure prononcée (petit ρ) a une grande courbure. En utilisant cette définition, notre équation de déformation devient :
L'étape cruciale finale consiste à relier cette courbure physique à la fonction de déplacement transversal de la poutre, v(x). Pour les petites flèches supposées dans la théorie d'Euler-Bernoulli, il existe une approximation mathématique directe :
La combinaison de ces relations nous donne l'équation finale et essentielle qui lie la déformation interne à la dérivée seconde du champ de déplacement. C'est cette équation qui constitue la base de notre dérivation par éléments finis :
2. Définition de l'élément et degrés de liberté (DDL)
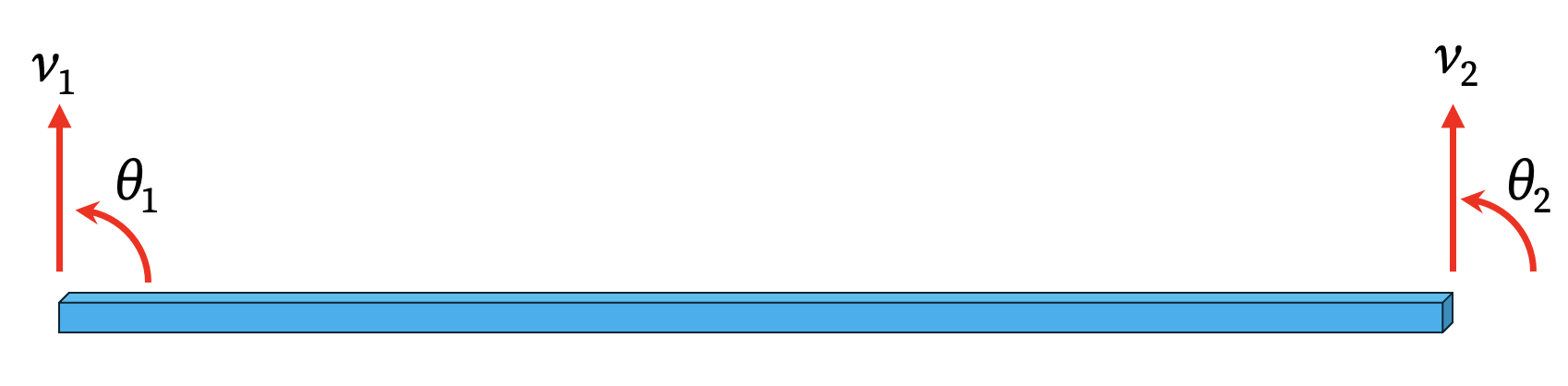
Pour capturer le comportement en flexion, nous définissons un élément de poutre à deux nœuds. Chaque nœud nécessite deux degrés de liberté (DDL) pour décrire son état :
- Un déplacement transversal,
v. - Une rotation,
θ.
Pour de petits angles, la rotation est égale à la pente de la courbe de déplacement, donc θ = dv/dx.
Cela signifie qu'un élément de poutre unique possède un total de quatre degrés de liberté. Ceux-ci sont rassemblés dans le vecteur de déplacements nodaux généralisés de l'élément, q :
3. Le champ de déplacement et la nécessité des fonctions de forme d'Hermite
L'essence de la méthode des éléments finis est d'approcher le champ de déplacement continu v(x) en utilisant un nombre fini de paramètres nodaux. Une simple fonction linéaire est insuffisante car sa dérivée seconde est toujours nulle, impliquant une courbure nulle et donc une déformation de flexion nulle.
Le polynôme le plus simple qui peut représenter une courbure non nulle et variable est un polynôme cubique, qui possède quatre coefficients inconnus (a₀ à a₃). Cela correspond commodément à nos quatre DDL nodaux.
Bien que nous puissions travailler avec les coefficients a_i, il est bien plus efficace de formuler le problème en utilisant des fonctions de forme qui relient directement le déplacement v(x) aux DDL nodaux du vecteur q. Les fonctions de forme spécifiques utilisées pour cela sont appelées polynômes d'Hermite.
Contrairement aux fonctions de forme de Lagrange plus simples qui interpolent seulement les valeurs, les fonctions de forme d'Hermite interpolent à la fois les valeurs et leurs dérivées premières aux nœuds. C'est exactement ce dont nous avons besoin pour gérer à la fois le déplacement (v) et la rotation (θ = dv/dx). La conséquence la plus importante est que les polynômes d'Hermite garantissent la continuité C¹ entre éléments adjacents, assurant que la pente est continue à travers les nœuds et que la forme déformée est lisse.
4. Dérivation étape par étape des fonctions de forme d'Hermite
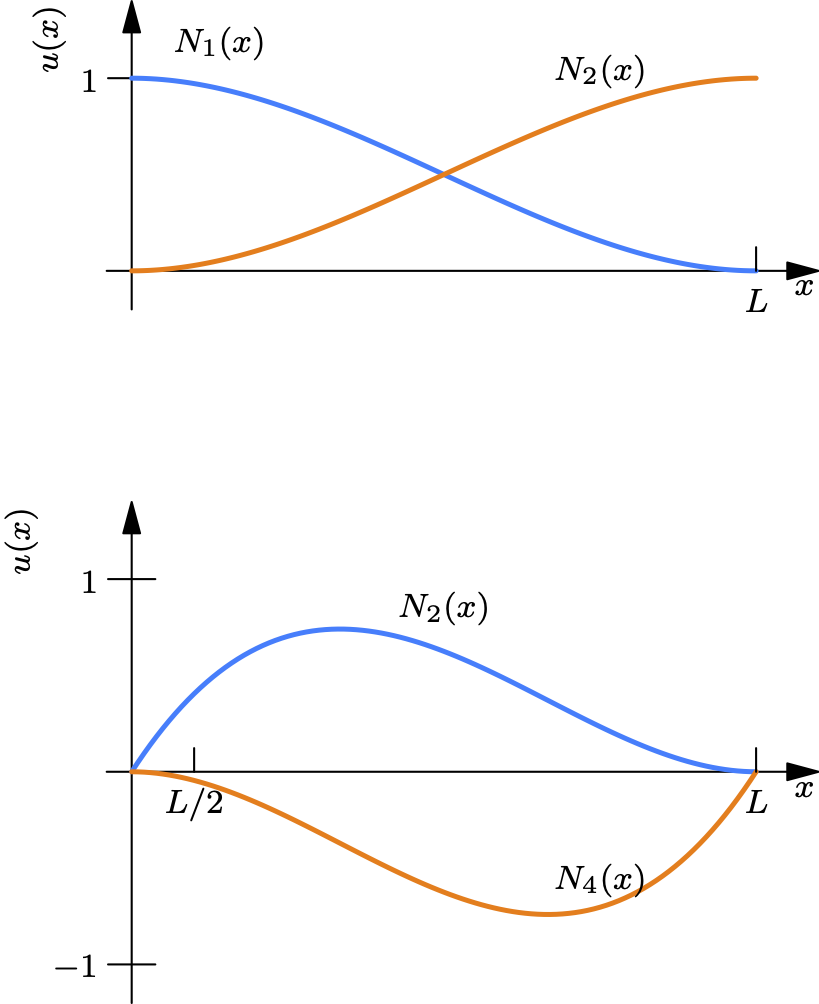
Nous allons dériver les quatre fonctions de forme, N₁(x) à N₄(x), telles que :
Chaque est obtenue en supposant et en résolvant quatre coefficients tels que et tous les autres degrés de liberté () sont nuls.
Dérivons N₁(x) en trouvant un polynôme cubique unique qui correspond à un déplacement unitaire au nœud 1 (v₁=1) tandis que tous les autres DDL nodaux sont nuls.
Étape 1 : Définir les conditions nodales pour N₁(x) La fonction doit satisfaire : 1. N₁(0) = 1 (Déplacement unitaire au nœud 1) 2. N₁'(0) = 0 (Pente nulle au nœud 1) 3. N₁(L) = 0 (Déplacement nul au nœud 2) 4. N₁'(L) = 0 (Pente nulle au nœud 2)
Étape 2 : Appliquer les conditions à un polynôme cubique général Soit N₁(x) = a x³ + b x² + c x + d. Sa dérivée est N₁'(x) = 3a x² + 2b x + c.
Appliquons les quatre conditions : 1. N₁(0) = 1 => a(0) + b(0) + c(0) + d = 1 => d = 1 2. N₁'(0) = 0 => 3a(0) + 2b(0) + c = 0 => c = 0 3. N₁(L) = 0 => aL³ + bL² + 0*L + 1 = 0 => aL³ + bL² = -1 4. N₁'(L) = 0 => 3aL² + 2bL + 0 = 0 => 3aL² + 2bL = 0
Étape 3 : Résoudre pour les coefficients a et b À partir de la condition (4), nous obtenons b = - (3/2)aL. Substituons ceci dans la condition (3) : aL³ + (-3/2 * aL)L² = -1 aL³ - 3/2 * aL³ = -1 -1/2 * aL³ = -1 => a = 2/L³
Trouvons maintenant b : b = -3/2 * (2/L³) * L => b = -3/L²
Étape 4 : Assembler la fonction de forme N₁(x) Substituer les coefficients a, b, c, d dans la forme polynomiale :
En suivant la même procédure pour les trois autres cas unitaires, nous dérivons toutes les quatre fonctions de forme d'Hermite.
5. Dérivation de la matrice de rigidité élémentaire
L'étape finale consiste à utiliser ces fonctions de forme pour dériver la matrice de rigidité élémentaire à partir de l'intégrale fondamentale :
1. Définir la matrice B : La déformation est et . La courbure d²v/dx² est :
2. Établir l'intégrale de rigidité : Le volume différentiel est dV = dA dx. Pour un état de contrainte 1D, la matrice d'élasticité E est simplement le module de Young, E. En substituant l'expression de B : A) peuvent être sortis de l'intégrale intérieure :
3. Le résultat final : Nous reconnaissons que le terme est la définition du moment quadratique, I. Cela simplifie énormément l'intégrale : L'évaluation des dérivées secondes des quatre fonctions de forme d'Hermite, la formation des produits matriciels et l'intégration par rapport à x de 0 à L donnent finalement la matrice de rigidité de poutre d'Euler-Bernoulli 4x4 classique :
Poutre orientée arbitrairement et matrice de transformation
Si l'on considère 6 degrés de liberté (en considérant un élément poutre-colonne), où la poutre peut également être étirée ou comprimée, alors la matrice de rigidité de l'élément est

Considérons maintenant une poutre qui fait un angle avec l'axe global. Dans ce cas, nous devons faire tourner le système de coordonnées global (x, y) d'un angle pour atteindre le système local (x', y').
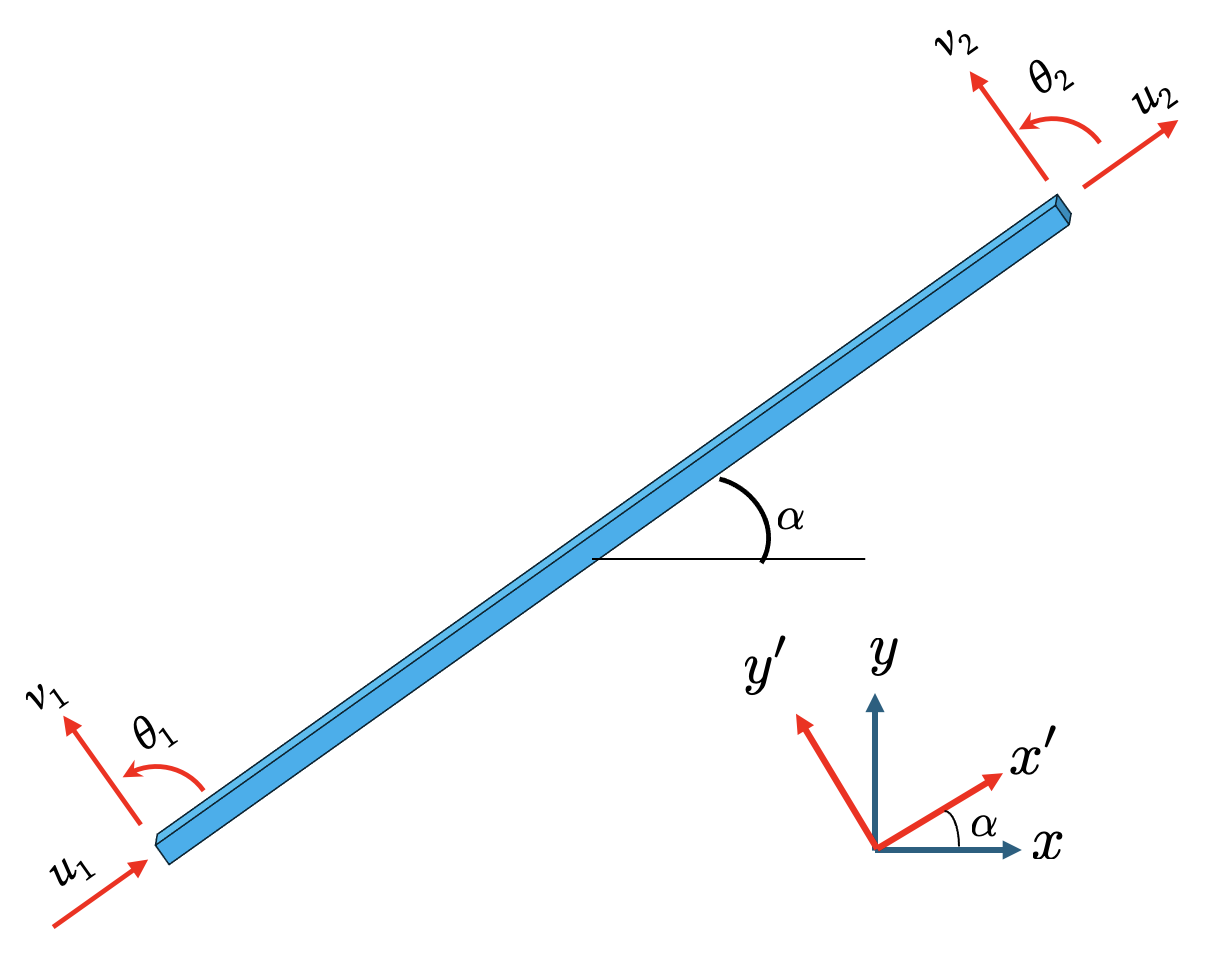
La transformation des degrés de liberté et est la même que la transformation de u et v pour un élément de treillis. Étant donné que le degré de liberté est le même dans les deux systèmes de coordonnées, la matrice de transformation devient
où La matrice de rigidité dans le système de coordonnées global devient