Truss Element
Dérivons la matrice de rigidité bien connue pour un élément simple de barre à deux nœuds (treillis). C’est-à-dire, nous considérons deux degrés de liberté et aux deux extrémités et leurs forces correspondantes et .
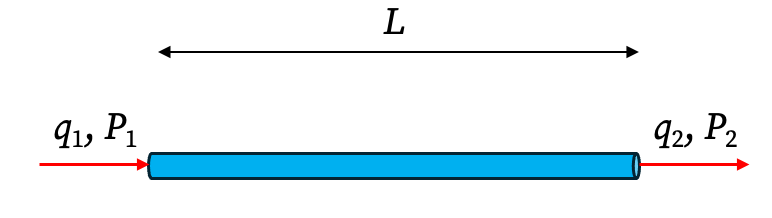
Analyse matricielle standard :
L’équilibre des forces exige que . De la résistance des matériaux, nous savons Les équations ci-dessus peuvent s’écrire
De l’analyse structurale, nous savons que la matrice de rigidité pour une barre de section transversale constante A, de module d’Young E et de longueur L est :
À partir des principes fondamentaux de la MEF : Maintenant, dérivons ceci à l’aide de l’intégrale MEF .
Champ de déplacement : Le déplacement axial
u(x)en tout point le long de la barre peut être interpolé à partir des déplacements nodauxq₁etq₂en utilisant des fonctions de forme linéaires. Si et , alors et si et , alors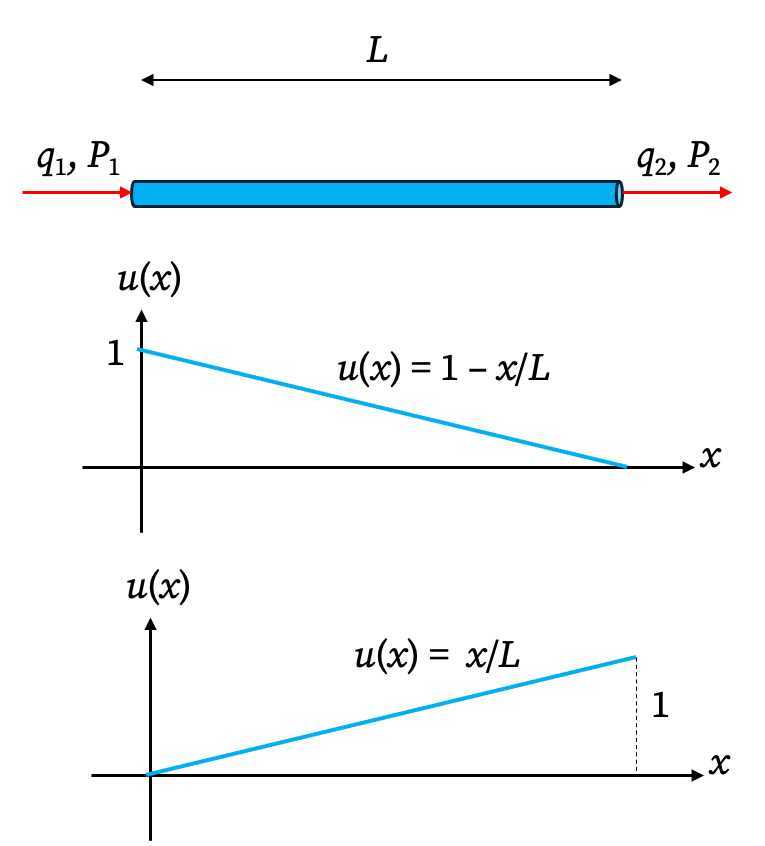
En utilisant la superposition, on obtient où est la matrice des fonctions de forme.
- Champ de déformation : La déformation axiale
εest la dérivée du déplacement. - Matrice de déformation-déplacement (B) : D’après ce qui précède, on voit que pour cet élément simple, la matrice B est constante :
- Matrice de matériau (E) : Pour une contrainte axiale 1D, la matrice de matériau E est simplement le scalaire du module d’Young, *E.
Intégration : Maintenant, on calcule l’intégrale de la matrice de rigidité sur le volume de l’élément ().
Puisque tout ce qui se trouve à l’intérieur de l’intégrale est constant par rapport à
x:Cela reproduit avec succès le résultat connu en utilisant les principes fondamentaux de la MEF.
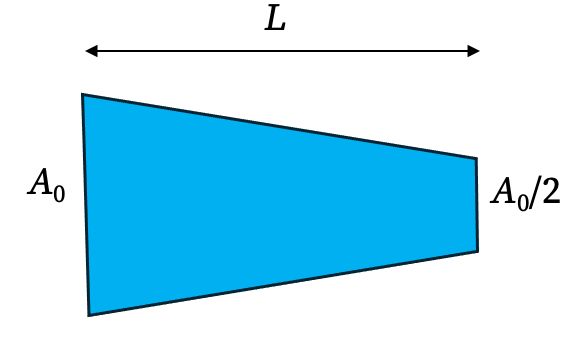
Analyse d’une barre à section variable
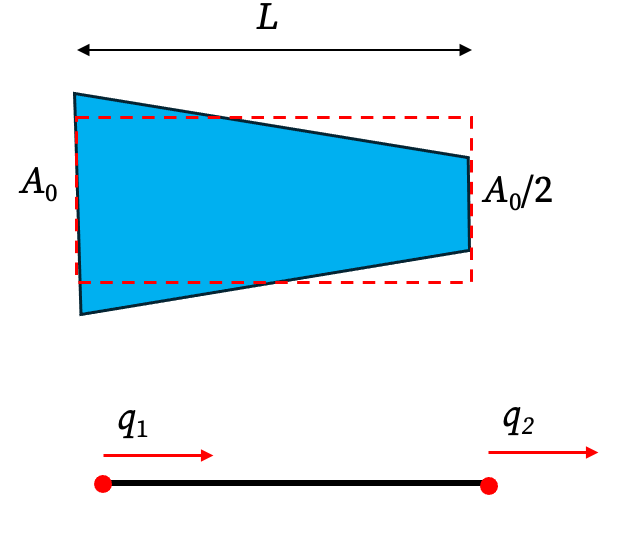
Considérons une barre de longueur L encastrée à une extrémité et soumise à une charge ponctuelle P₁ à l’autre. Sa section transversale varie linéairement :
1. Solution analytique
Nous pouvons trouver le déplacement « exact » en intégrant la déformation le long de la barre.
Puisqu’il n’y a pas de force répartie, la force interne en chaque point doit être constante et égale à l’effort normal . Par conséquent, Ainsi
Or et Puisque , Ainsi la matrice de rigidité exacte est
2. Solution MEF (Un seul élément linéaire)
Nous modélisons maintenant la même barre avec un seul élément fini à deux nœuds. Nous utilisons les mêmes fonctions de forme linéaires que dans l’exemple du treillis, ce qui signifie que notre matrice B est à nouveau
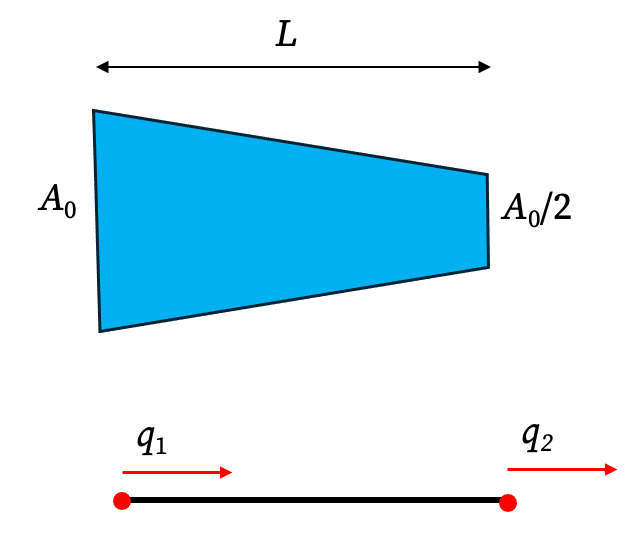
La différence principale est que la section A(x) se trouve maintenant à l’intérieur de l’intégrale de rigidité :
En remplaçant ceci dans l’expression de K :
Ce résultat est une approximation. L’hypothèse d’un champ de déplacement linéaire (u(x) = Nq) conduit à un champ de déformation constant (ε = Bq), qui ne peut pas représenter la déformation variable réelle dans la barre à section variable. Cet écart entraîne une erreur (dans ce cas, l’élément est trop rigide).
Avec cette méthode, il semble que nous ayons remplacé la barre par une barre de section constante égale à la section moyenne . L’erreur n’est que d’environ 4 %.
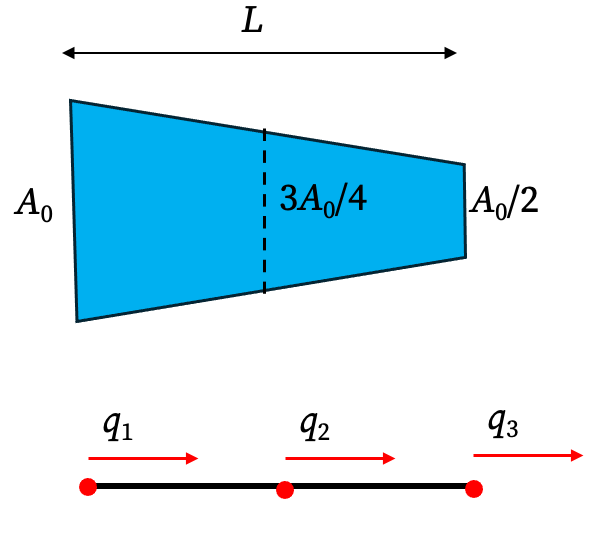
3. Amélioration de la précision MEF : Modèle à deux éléments de la barre à section variable
Modélisons la barre à section variable avec deux éléments linéaires de longueur L/2. On peut considérer la section comme constante pour chaque élément, en utilisant la valeur à son point milieu.
- Élément 1 (x = 0 à L/2) : Point milieu à
x=L/4.A₁ = A₀(1 - (L/4)/2L) = (7/8)A₀. - Élément 2 (x = L/2 à L) : Point milieu à
x=3L/4.A₂ = A₀(1 - (3L/4)/2L) = (5/8)A₀.
Les matrices de rigidité sont :
Assemblage : On combine celles-ci en une matrice de rigidité globale 3x3 Kglobal en ajoutant les contributions pour chaque degré de liberté (nœud).
Condensation statique :
Souvent, on ne s’intéresse qu’à la relation entre les degrés de liberté externes (nœuds 1 et 3) et non au nœud interne (2). La condensation statique est une technique de réduction de matrice utilisée pour éliminer les d.d.l. internes. Le système global partitionné est : Cela peut s’écrire Si aucune force n’est appliquée aux nœuds internes (Pi = 0), on peut résoudre pour qi et le substituer pour obtenir une matrice de rigidité condensée Kcondensée ne concernant que les d.d.l. externes.
En appliquant ceci à notre modèle à deux éléments on obtient une matrice 2x2
qui donne un résultat bien plus précis pour la rigidité de la barre, réduisant significativement l’erreur (environ 0,2 %).
4.2. Éléments d’ordre supérieur
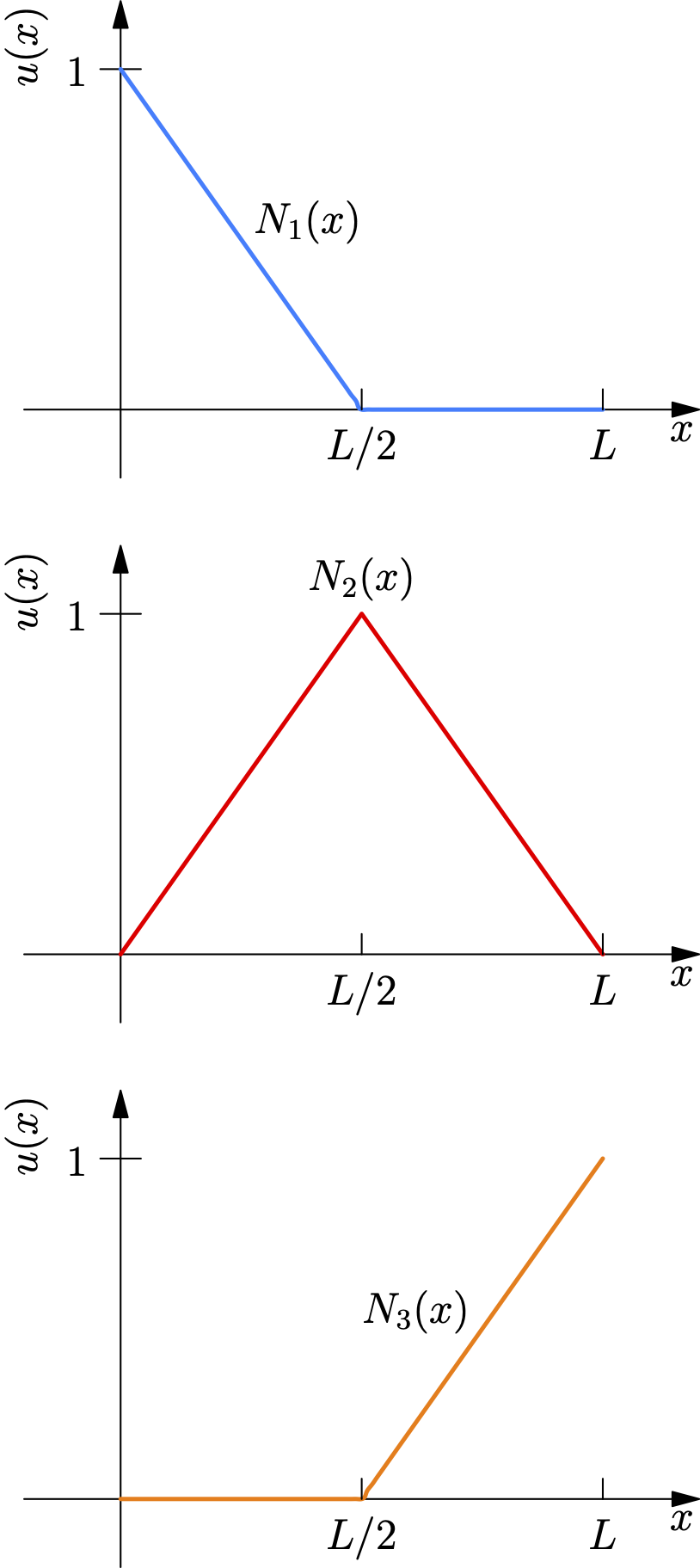
Au lieu d’utiliser plus d’éléments simples, on peut utiliser un seul élément plus complexe. Un élément quadratique, par exemple, possède un troisième nœud en son milieu et utilise des polynômes du second ordre pour ses fonctions de forme.
Pour un élément barre à 3 nœuds (nœuds en x=0, L, L/2), le champ de déplacement est : où N₁, N₂, N₃ sont des fonctions quadratiques :

Ceci conduit à un champ de déformation ε(x) qui varie linéairement, ce qui est une bien meilleure approximation pour la barre à section variable. Le calcul de la matrice de rigidité 3x3
puis l’utilisation de la condensation statique pour obtenir une matrice de rigidité externe 2x2 donne une solution très précise (erreur d’environ 0,12 % dans l’exemple) :
Si l’on prend des fonctions de forme linéaires
alors le résultat sera identique au cas où l’on a choisi deux éléments.