Distorted Quadrilateral Element: Natural Coordinate System
La formulation de l'élément rectangulaire est simple et efficace, mais elle présente un inconvénient majeur : elle est définie pour un rectangle parfait dont les côtés sont alignés avec les axes cartésiens globaux (x, y). Les géométries du monde réel sont complexes, et il est souvent inefficace voire impossible de mailler une forme complexe en utilisant uniquement des rectangles parfaits.
Si nous essayons d'utiliser les fonctions de forme dérivées précédemment pour une forme quadrilatérale générale et déformée, elles ne satisferont pas aux propriétés requises (par exemple, une fonction de forme peut ne pas être nulle le long d'un bord opposé). Ceci parce que les fonctions sont explicitement liées aux coordonnées x et y et aux dimensions spécifiques de l'élément, a et b.
Pour analyser des éléments quadrilatéraux de forme arbitraire, nous devons introduire un nouveau système de coordonnées indépendant de la forme de l'élément dans le système global. Cela nous amène au concept de Coordonnées naturelles.
1. Le système de coordonnées naturelles
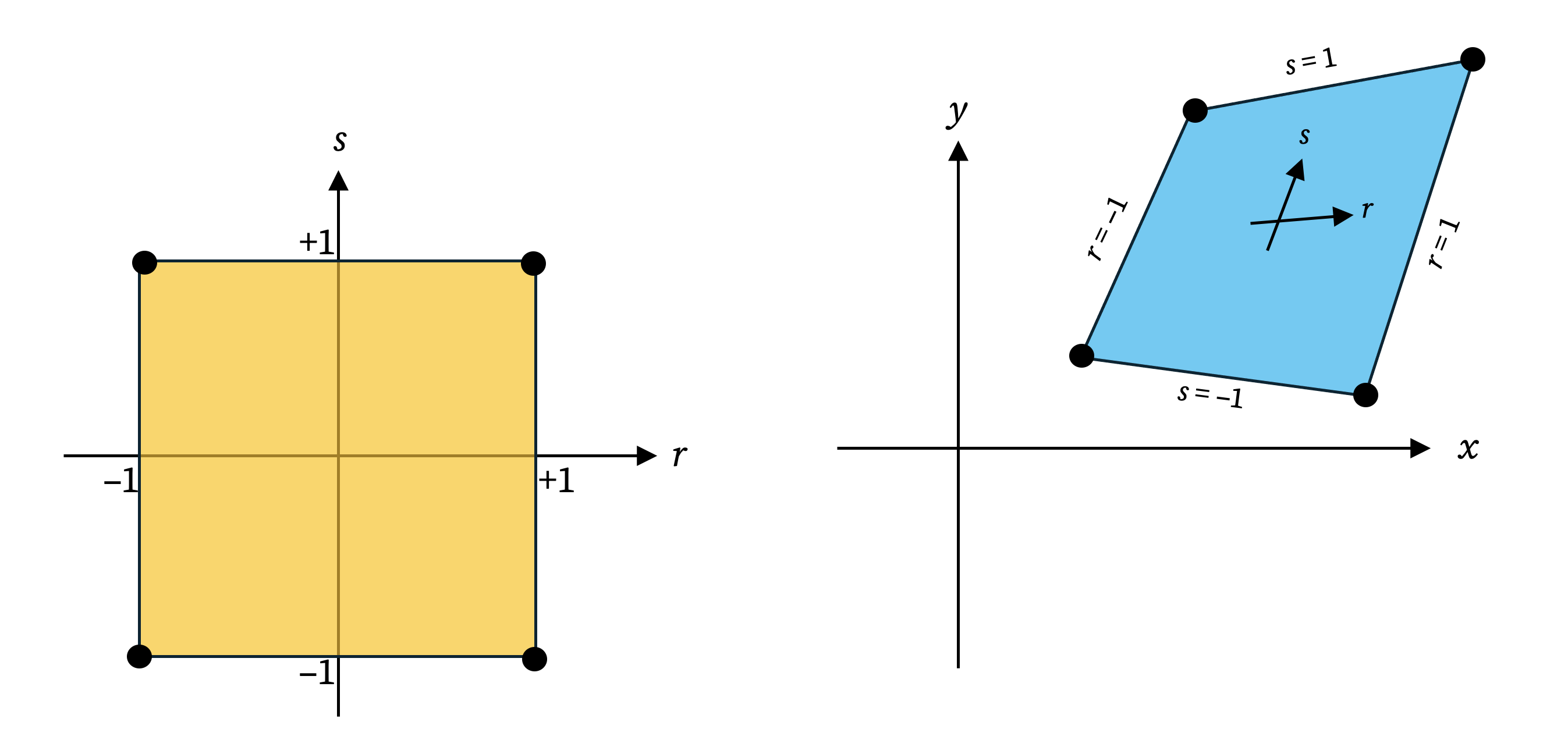
L'idée centrale du système de coordonnées naturelles est de faire correspondre tout quadrilatère de forme arbitraire dans le système de coordonnées global (x, y) à un élément « parent » unique, parfaitement carré, dans un système de coordonnées local (r, s).
- Système global (Élément réel) : L'élément physique avec les coordonnées x et y. Il peut être déformé, et ses côtés peuvent ne pas être parallèles.
- Système naturel (Élément parent) : Un carré parfait défini par les coordonnées r et s, où r et s varient tous deux de -1 à +1.
Cette transformation convertit une géométrie complexe en une géométrie simple et standardisée, ce qui simplifie grandement la formulation, surtout l'intégration.
2. Formulation isoparamétrique : correspondance et fonctions de forme
Le génie de la formulation isoparamétrique consiste à utiliser les mêmes fonctions de forme pour définir la correspondance géométrique que celles utilisées pour interpoler le champ de déplacement.
2.1 Fonctions de forme en coordonnées naturelles
Sur le carré parent (r, s), les fonctions de forme pour l'élément à 4 nœuds ont une forme simple et universelle, analogue à la méthode du produit utilisée pour le rectangle :
Ces fonctions sont toujours les mêmes, quelle que soit la forme de l'élément réel dans le plan (x, y).
2.2 La correspondance géométrique
La connexion entre les deux systèmes de coordonnées est établie en utilisant ces fonctions de forme pour interpoler les coordonnées globales à partir des coordonnées nodales :
Cette correspondance nous permet de trouver les coordonnées globales (x, y) correspondant à tout point donné par ses coordonnées naturelles (r, s).
2.3 Interpolation du déplacement
Utilisons exactement les mêmes fonctions pour décrire le champ de déplacement (u, v) en tout point (r, s) à l'intérieur de l'élément. Le champ de déplacement continu est interpolé à partir des valeurs discrètes de déplacement nodal u_i et v_i en utilisant le même ensemble de fonctions de forme :
Ici, ui et vi sont les composantes du vecteur de déplacement nodal q. Ceci peut être exprimé sous forme matricielle :
Cette structure parallèle n'est pas une coïncidence ; c'est la définition fondamentale d'un élément isoparamétrique.
3. La matrice jacobienne : mise en relation des dérivées
Pour former la matrice B, nous avons besoin des dérivées des fonctions de forme par rapport aux coordonnées globales, x et y. Cependant, nos fonctions de forme sont définies en termes des coordonnées naturelles, r et s. Nous pouvons relier ces dérivées en utilisant la règle de chaîne de la différentiation partielle :
Ce système peut être écrit sous forme matricielle :
La matrice dans cette équation est la matrice jacobienne, J.
Puisque nous avons besoin des dérivées par rapport à x et y pour former la matrice B, nous devons inverser cette relation :
Les termes de la matrice jacobienne peuvent être calculés en différentiant les équations de correspondance (par exemple, ).
6. Intégration en coordonnées naturelles
La dernière étape consiste à transformer l'intégrale de la matrice de rigidité dans le système de coordonnées naturelles. L'élément d'aire différentielle se transforme également :
Le déterminant du jacobien, det(J), agit comme un facteur d'échelle entre les aires différentielles dans les deux systèmes. L'intégrale de la matrice de rigidité élémentaire devient :
Cette intégrale a des bornes constantes de -1 à 1, quelle que soit la forme de l'élément réel. Cette forme standardisée est idéale pour les techniques d'intégration numérique, telles que la quadrature de Gauss, qui est la méthode standard pour évaluer ces intégrales dans les logiciels de MEF.