Une poutre en porte-à-faux avec une charge d'extrémité
Analysons maintenant les champs de contraintes et de déplacements dans une poutre cantilever prismatique soumise à une force transversale concentrée. Ce cas est fondamentalement différent de la flexion pure car la présence d’une force transversale nécessite l’existence d’un effort tranchant interne qui varie le long de la poutre. C’est cet effort tranchant qui s’avérera être la source de la déformation non plane.
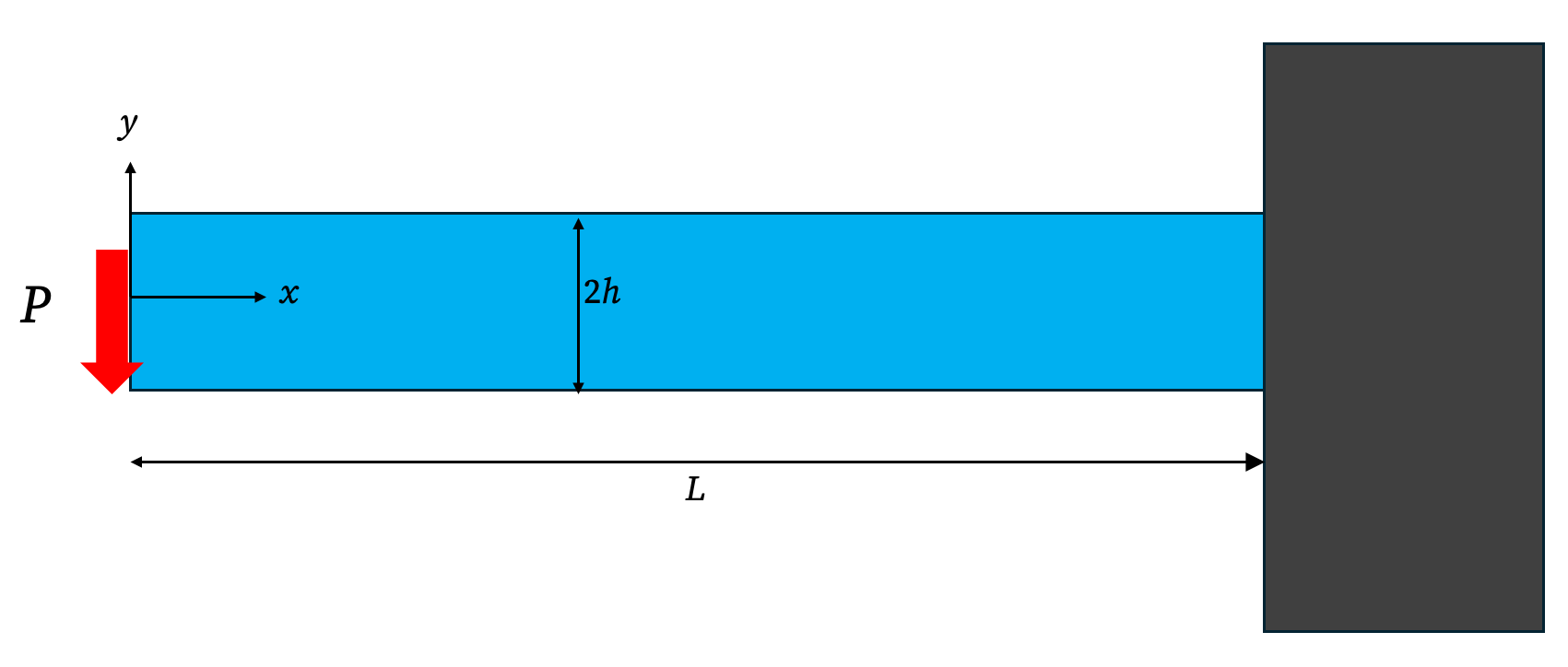
Considérons une poutre droite de section rectangulaire, de longueur , de hauteur et de largeur . La poutre est encastrée à l’extrémité et libre à l’extrémité . Une force verticale concentrée, , agit vers le bas à l’extrémité libre.
Étape 1 : Hypothèses et conditions aux limites
1. L’hypothèse de contrainte plane
Comme dans le cas de la flexion pure, la poutre est élancée et le chargement est limité au plan xy. Nous supposons donc un état de contrainte plane, où les composantes de contrainte dans la direction z sont négligeables :
2. Formulation des conditions aux limites
- Sur les surfaces supérieure et inférieure () : Ces surfaces sont libres de toute charge appliquée.
- À l’extrémité libre () : La distribution de contraintes doit être statiquement équivalente à une force verticale descendante .
- Aucun effort axial résultant :
- Aucun moment fléchissant résultant : Le moment à l’extrémité libre est nul.
- Effort tranchant résultant : La force verticale résultante doit être égale à .
- À l’extrémité encastrée () : Ici, les déplacements et la rotation sont nuls. Nous utiliserons ces conditions plus tard lors de la détermination du champ de déplacement.
Étape 2 : Résolution à l’aide de la fonction de contrainte d’Airy
Puisque le moment fléchissant est , et d’après la résistance des matériaux, nous savons que et , nous nous attendons à ce que contienne un terme de la forme
L’intégration par rapport à y donne
Une nouvelle intégration par rapport à y donne
Nous savons que doit satisfaire , soit
La substitution de dans l’équation ci-dessus donne
Cette équation devant être satisfaite pour toute valeur de y, nous devons avoir
Cela signifie
et
Où .
Rappelons que les termes constants et linéaires ne contribuent pas aux composantes de contrainte, nous pouvons donc poser
et
Pour déterminer les coefficients, appliquons les conditions aux limites sur les surfaces supérieure et inférieure :
Ces conditions donnent les équations suivantes
Ces équations devant être satisfaites pour toute valeur de x, nous devons avoir :
Par conséquent
Pour déterminer , nous utilisons la condition
Cela donne
Puisque , nous pouvons écrire
et
Nous pouvons maintenant calculer facilement les composantes de contrainte :
Ce champ de contraintes satisfait l’équilibre et toutes les conditions aux limites sur les surfaces supérieure, inférieure et à l’extrémité libre.
Étape 3 : Détermination du champ de déplacement (, )
Nous intégrons maintenant les relations déformation-déplacement en utilisant le champ de contraintes correct.
1. Calcul des déformations (Contrainte plane)
### 2. Intégration des relations déformation-déplacement Intégration de : Intégration de : Utilisation de la relation de cisaillement :
À l’extrémité encastrée, la poutre est totalement contrainte. Nous imposons que le centroïde de la section encastrée ne se translate pas, et que la pente de la fibre neutre soit nulle.
- Condition 1 : Aucun déplacement horizontal à l’extrémité encastrée
- Condition 2 : Aucun déplacement vertical à l’extrémité encastrée : Nous avons besoin d’une condition supplémentaire pour déterminer k.
- Condition 3 : Aucune rotation de la poutre autour de l’extrémité encastrée. Nous avons deux options :
- Pente nulle de la fibre neutre à l’encastrement.
- Rotation nulle de l’élément vertical de la section droite au centroïde de la section d’extrémité. Appliquons la condition . La dérivée de par rapport à est : En substituant 0 à y et L à x, et en égalant l’expression ci-dessus à zéro, nous obtenons et . Ainsi,
La flèche maximale se produit à l’extrémité libre () et vaut , le résultat familier de la résistance des matériaux.
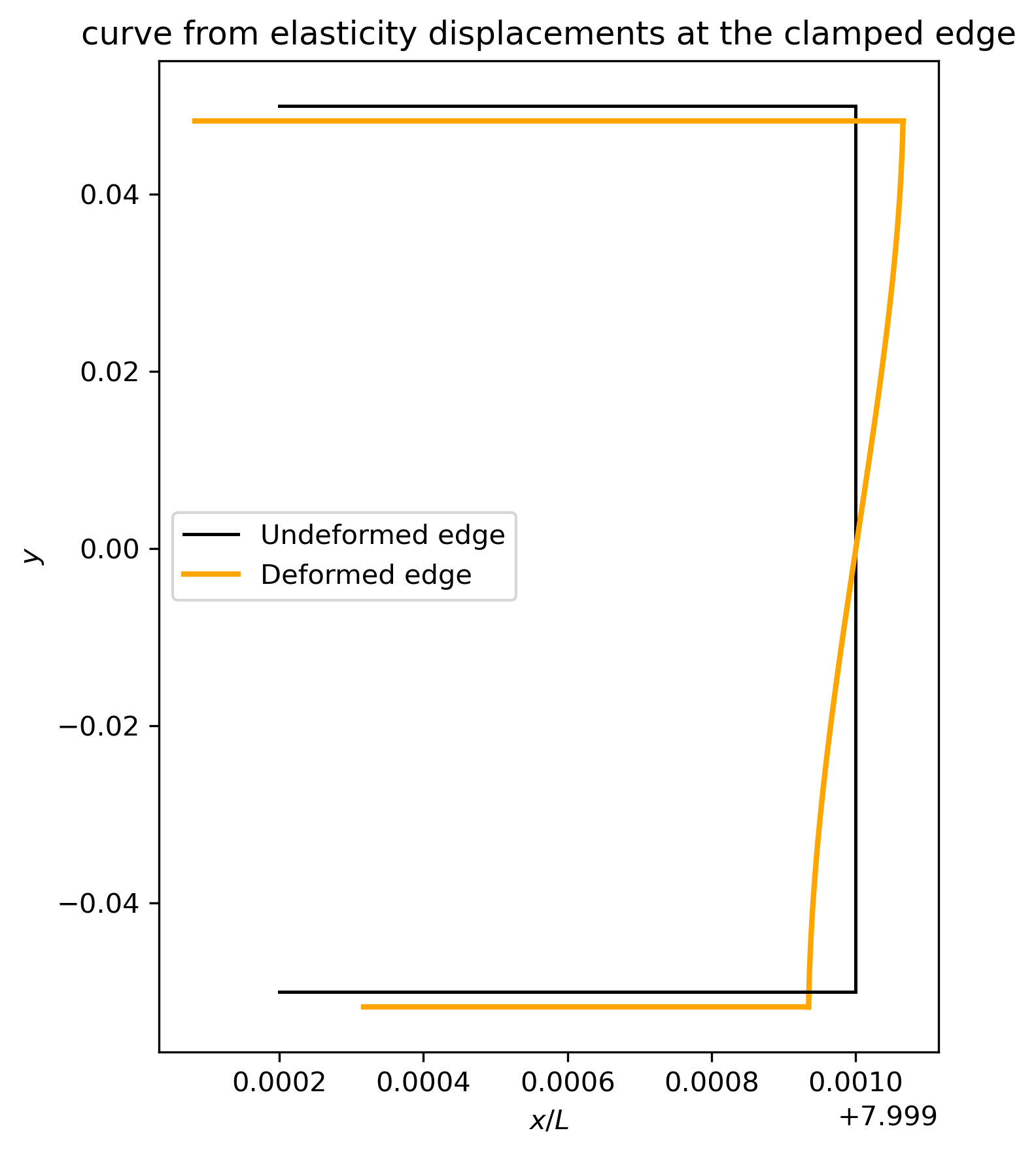
Distorsion de la section transversale
Un enseignement clé de la solution élastique est que les plans de section transversale, initialement plats et perpendiculaires à la fibre neutre, ne restent pas plans après déformation en présence de contraintes de cisaillement. Ce comportement contraste avec l’hypothèse de la théorie des poutres d’Euler–Bernoulli, qui suppose que « les sections planes restent planes ». La figure ci-dessous illustre la distorsion résultante de la section transversale d’extrémité.