Flexion pure
Nous allons maintenant appliquer la méthode de la fonction de contrainte d'Airy à l'un des problèmes les plus fondamentaux de la mécanique des solides : déterminer l'état de contrainte dans une poutre prismatique soumise à un moment de flexion pure. Bien que la solution soit bien connue en mécanique des matériaux élémentaire, sa dérivation par la théorie de l'élasticité fournit une validation plus rigoureuse du résultat et met en évidence les hypothèses impliquées.
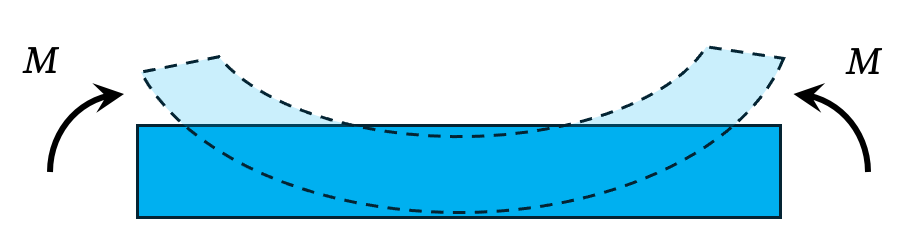
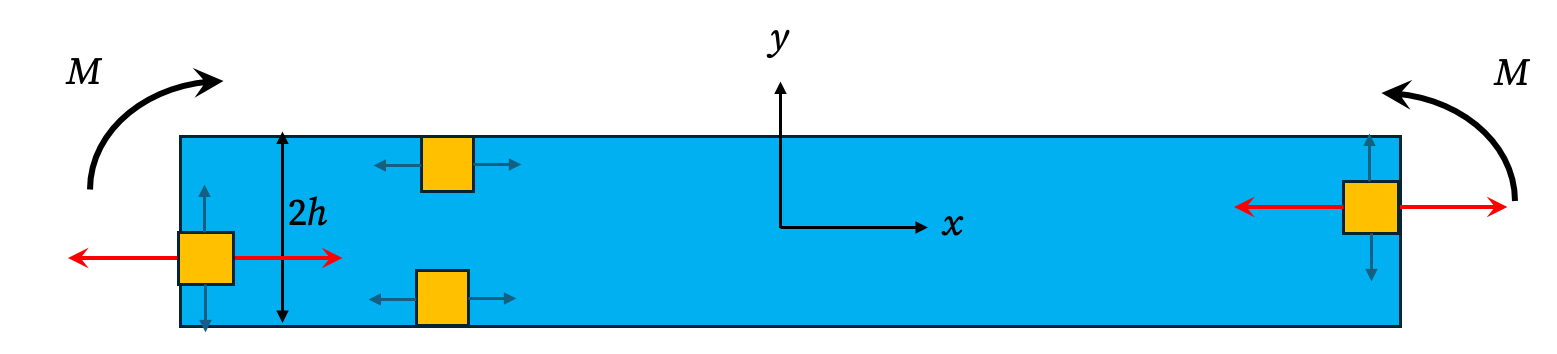
Considérons une poutre droite de section rectangulaire de longueur , de hauteur et de largeur . Nous établissons un système de coordonnées avec l'axe x le long de l'axe de la poutre (passant par le centroïde), et l'axe y dans la direction de sa hauteur. La poutre occupe la région définie par et . La poutre est soumise à un moment de flexion pur, , aux deux extrémités.
Étape 1 : Hypothèses et conditions aux limites
Avant de chercher une solution, il est impératif d'énoncer nos hypothèses initiales puis de définir précisément les conditions que notre champ de contraintes doit satisfaire sur toutes les surfaces du corps.
1. L'hypothèse de contrainte plane
Une poutre typique est une structure longue par rapport aux dimensions de sa section transversale, et sa largeur () est souvent comparable ou peu supérieure à sa hauteur (). De plus, elle n'est chargée que dans le plan xy. Comme la poutre n'est pas très épaisse dans la direction z (la largeur) et qu'aucune force n'est appliquée sur les faces en , il est physiquement raisonnable de supposer que les composantes de contrainte agissant dans la direction z sont négligeables dans tout le corps. Par conséquent, nous supposons : C'est précisément la définition d'un état de contrainte plane. Cette hypothèse nous permet d'utiliser le cadre bidimensionnel d'élasticité que nous avons développé.
2. Formulation des conditions aux limites
Nous pouvons maintenant énoncer les conditions sur les frontières de notre modèle 2D.
- Conditions sur les surfaces supérieure et inférieure () : Les surfaces supérieure et inférieure sont libres de toute force appliquée. Cela signifie qu'il ne peut y avoir ni contrainte normale (pas de pression verticale) ni contrainte de cisaillement (pas de frottement horizontal) agissant sur ces surfaces.
- Conditions sur les extrémités () : La résultante de la distribution de contraintes à chaque extrémité doit être équivalente à un moment pur, . Cela implique trois conditions intégrales distinctes :
- Aucun effort normal net :
- Aucun effort tranchant net :
- Moment de flexion net : En adoptant la convention qu'un moment positif produit une traction pour :
Étape 2 : Proposition d'une forme pour la fonction de contrainte d'Airy
Nos conditions étant spécifiées, nous cherchons maintenant une fonction de contrainte d'Airy qui satisfait l'équation biharmonique, .
Supposons que partout, et pas seulement aux frontières. Mais pourquoi ? Voici le raisonnement :
- Nous savons d'après les conditions aux limites que sur les surfaces supérieure et inférieure ().
- Il n'y a pas de forces volumiques (comme la gravité) agissant dans la direction y à l'intérieur de la poutre.
- Il n'y a aucun mécanisme dans ce problème de flexion pure qui suggérerait qu'une contrainte verticale devrait se développer à l'intérieur.
- Par conséquent, nous pouvons proposer que la solution la plus simple possible qui satisfait les conditions aux limites est celle où et sont nuls partout à l'intérieur de la poutre, et pas seulement sur les surfaces.
Testons cette hypothèse. Si cet état de contrainte simple peut satisfaire toutes les conditions aux limites restantes, alors par le principe d'unicité de la solution en élasticité, il doit être la solution correcte.
Traduisons cette hypothèse en conditions sur :
- Si partout, alors peut au plus être une fonction linéaire de . On peut l'écrire comme .
- Si partout, alors la dérivée de notre forme pour doit être nulle : . Cela implique que doit être une constante.
- En combinant, notre fonction doit avoir la forme . Cependant, le problème de flexion est symétrique par rapport à , donc nous nous attendons à ce que les contraintes soient indépendantes de . Une contrainte constante provenant du terme en violerait la condition de moment. La forme la plus simple qui respecte la physique est de supposer que est une fonction de seulement.
Nous proposons donc un polynôme en comme solution candidate : Il s'agit d'un polynôme du troisième degré, donc il satisfait automatiquement l'équation biharmonique .
Étape 3 : Application des conditions aux limites à la solution proposée
Déterminons les contraintes à partir de notre proposée et voyons si elles peuvent satisfaire toutes les conditions. Notre hypothèse satisfait immédiatement les conditions pour et sur les surfaces supérieure et inférieure, et satisfait également la condition d'effort tranchant net nul aux extrémités. Nous vérifions maintenant les deux conditions restantes aux extrémités pour trouver les constantes A et B.
Application de la condition d'effort normal nul : Puisque et sont non nuls, cela exige que B = 0.
Application de la condition de moment de flexion net : Avec B=0, notre contrainte normale est maintenant simplement . Nous pouvons maintenant résoudre pour la constante A : En rappelant que le moment d'inertie pour une section rectangulaire est , nous pouvons écrire A en termes de I :
Étape 4 : Solution finale et vérification
Nous avons trouvé avec succès tous les coefficients sur la base de notre hypothèse initiale. La fonction de contrainte d'Airy pour la flexion pure est : De cette fonction, nous déduisons les composantes finales de la contrainte : Cette solution, dérivée de notre supposition éclairée que et étaient nuls partout, satisfait avec succès toutes les conditions aux limites du problème. Cela justifie notre hypothèse initiale et fournit la formule classique de flexion, rigoureusement dérivée de la théorie de l'élasticité.
Étape 3 : Dérivation du champ de déplacement (, )
Pour trouver les déplacements, nous devons intégrer les relations déformation-déplacement, en utilisant les déformations déterminées à partir de notre champ de contraintes via la loi de Hooke pour la contrainte plane.
1. Trouver les déformations :
2. Intégrer les relations déformation-déplacement : Nous commençons par . L'intégration par rapport à donne : où est une fonction arbitraire de qui joue le rôle de « constante » d'intégration.
Ensuite, à partir de : où est une fonction arbitraire de .
3. Utiliser la déformation de cisaillement pour coupler les équations : Nous utilisons la dernière relation, , pour trouver les fonctions inconnues et .
4. Assembler et contraindre les mouvements de corps rigide : En substituant ces résultats, le champ de déplacement général est : Les constantes représentent le mouvement de corps rigide. Pour les déterminer, nous devons fixer la poutre dans l'espace. Imposons que l'origine () ne subisse pas de translation, et que la pente de l'axe neutre soit nulle à l'origine. * * *
Les trois constantes sont nulles. Le champ de déplacement final est :