Mesure de la déformation de surface
Jauge de contrainte à résistance1
Sauf dans quelques cas impliquant des contraintes de contact, il n'est pas possible de mesurer directement la contrainte. Par conséquent, les mesures expérimentales de contrainte sont en réalité basées sur les déformations mesurées et sont converties en contraintes au moyen de la loi de Hooke et des relations plus générales qui sont données dans le chapitre suivant. Le dispositif de mesure de déformation le plus universel est la jauge de contrainte à fil collé, fréquemment appelée jauge de contrainte SR-4. Ces jauges sont constituées de plusieurs boucles de fil fin ou de feuille de composition spéciale, qui sont cimentées à la surface du corps à étudier. Si le ciment est considérablement plus résistant que la jauge elle-même, la jauge devient effectivement une partie intégrante du corps. En conséquence, lorsque le corps est soumis à une déformation dans la direction de la jauge, le fil à l'intérieur de la jauge et le corps subiront la même déformation, et leur résistance électrique est modifiée. Le changement de résistance, qui est proportionnel à la déformation, peut être déterminé avec précision à l'aide d'un simple circuit en pont de Wheatstone. La sensibilité élevée, la stabilité, la robustesse comparative et la facilité d'application font des jauges de contrainte à résistance un outil très puissant pour la détermination des déformations.

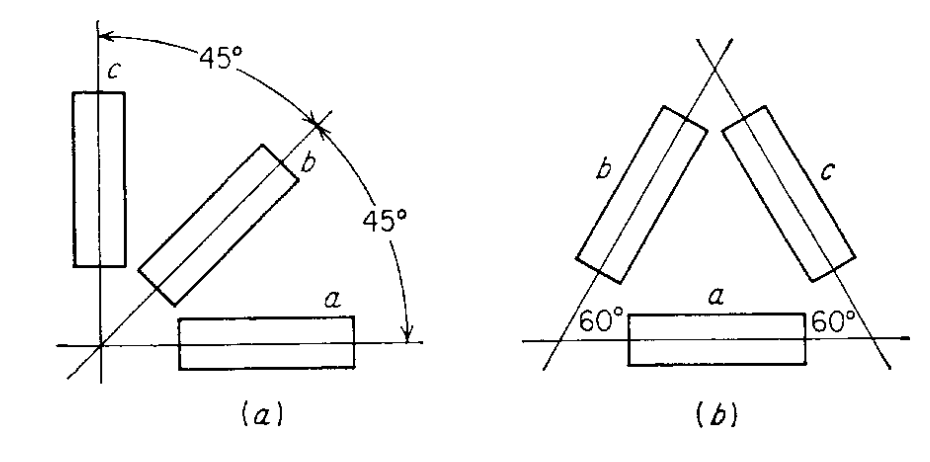
Pour les problèmes pratiques d'analyse expérimentale des contraintes, il est souvent important de déterminer les contraintes principales. Si les directions principales sont connues, les jauges peuvent être orientées dans ces directions et les contraintes principales déterminées assez facilement. Dans le cas général, la direction des déformations principales ne sera pas connue, de sorte qu'il sera nécessaire de déterminer l'orientation et l'amplitude des déformations principales à partir des déformations mesurées dans des directions arbitraires. Comme aucune contrainte ne peut agir perpendiculairement à une surface libre, les mesures par jauge de contrainte impliquent un état de déformation bidimensionnel. L'état de déformation est complètement déterminé si ϵxx, ϵyy et γxy peuvent être mesurés. Cependant, les jauges de contrainte ne peuvent effectuer que des lectures directes de la déformation linéaire, tandis que les déformations de cisaillement doivent être déterminées indirectement. Par conséquent, il est d'usage d'utiliser trois jauges de contrainte séparées par des angles fixes sous la forme d'une « rosette », comme dans la figure suivante. Les lectures des jauges de contrainte à trois valeurs de θ donneront trois équations simultanées, qui peuvent être résolues pour ϵxx, ϵyy et γxy. Ensuite, nous pouvons déterminer les déformations principales.
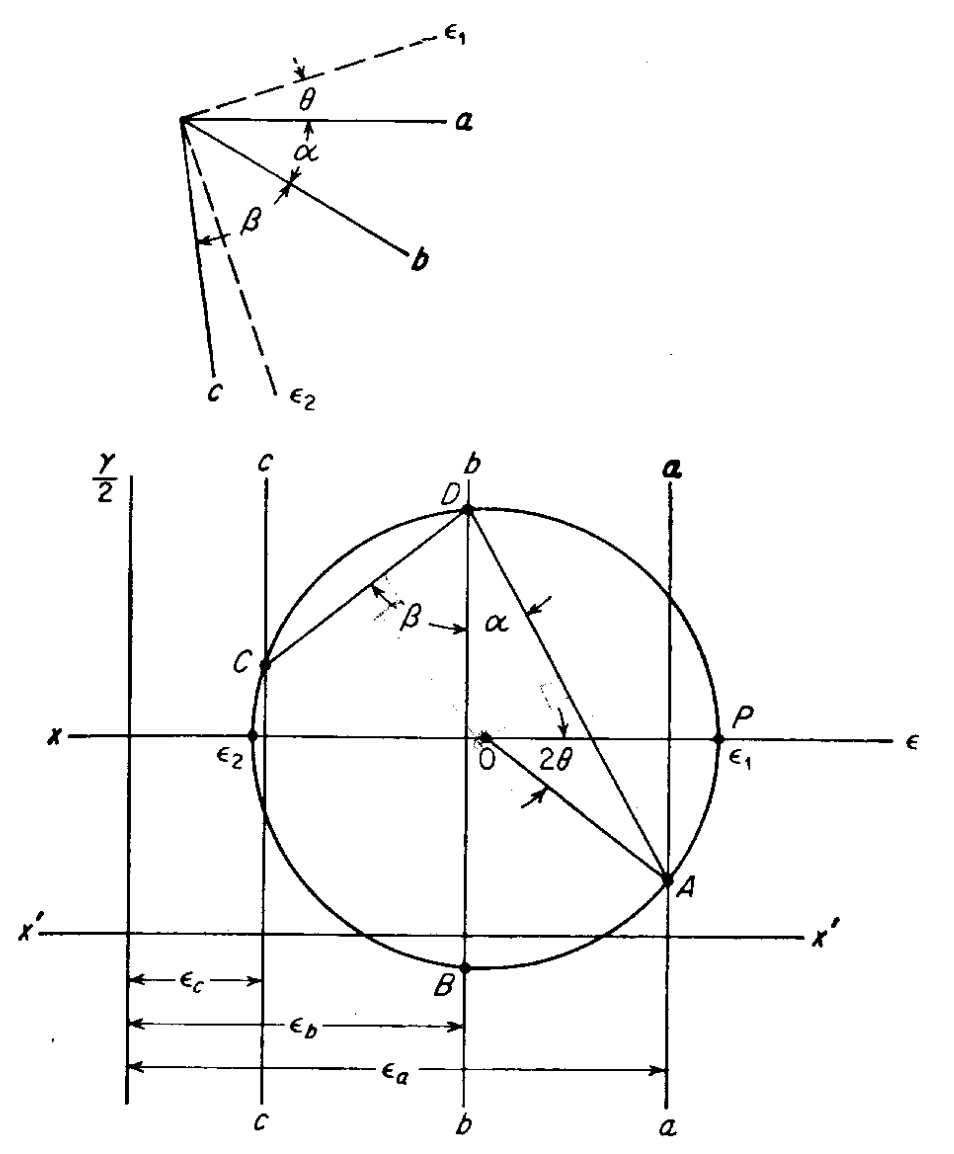
Une méthode plus pratique pour déterminer les déformations principales à partir des lectures de jauges de contrainte que la résolution de trois équations simultanées à trois inconnues est l'utilisation du cercle de Mohr. Lors de la construction d'une représentation du cercle de Mohr de la déformation, les valeurs de la déformation normale linéaire ϵ sont tracées le long de l'axe x, et la déformation de cisaillement γ divisée par 2 (ou ϵxy) est tracée le long de l'axe y. La figure suivante montre la construction du cercle de Mohr pour la rosette de jauges de contrainte généralisée illustrée en haut de la figure. Les lectures des jauges de contrainte ϵa, ϵb et ϵc pour les déformations normales sont disponibles pour trois jauges situées à des angles arbitraires α et β. L'objectif est de déterminer l'amplitude et l'orientation des déformations principales ϵ1 et ϵ2.
- Le long d'un axe arbitraire X’X’, tracez des lignes verticales aa, bb et cc correspondant aux déformations ϵa, ϵb et ϵc.
- À partir de n'importe quel point sur la ligne bb (jauge de déformation centrale), tracez une ligne DA à un angle α avec bb et coupant aa au point A. De la même manière, tracez DC coupant cc au point C.
- Construisez un cercle passant par A, C et D. Le centre de ce cercle est en O, déterminé par l'intersection des médiatrices de CD et AD.
- Les points A, B et C sur le cercle donnent les valeurs de ϵ et γ/2 (mesurées à partir du nouvel axe x passant par O) pour les trois jauges.
- Les valeurs des déformations principales sont déterminées par l'intersection du cercle avec le nouvel axe x passant par O. La relation angulaire de ϵ1 par rapport à la jauge a est la moitié de l'angle AOP sur le cercle de Mohr (AOP = 2θ).
Une rosette de déformation à 60° (delta) en un point sur une surface libre donne les mesures suivantes : ε(0°) = 100 μ, ε(60°) = - 200 μ et ε(120°) = 300 μ. Déterminez (a) les déformations principales dans le plan (ε₁ et ε₂) et (b) la déformation de cisaillement maximale réelle (γmax).
Solution
Rappelons que :
La déformation de cisaillement maximale est
Corrélation d'Images Numériques (DIC)
Une autre méthode pour mesurer la déformation de surface, particulièrement dans les essais mécaniques à l'échelle micro et nano, est la Corrélation d'Images Numériques (DIC). Cette méthode optique sans contact utilise des caméras numériques pour suivre le mouvement d'un motif de tavelures appliqué à la surface d'un objet. En comparant les images de l'objet avant et pendant la déformation, le logiciel DIC peut calculer le déplacement et la déformation sur l'ensemble de la surface.
Bien sûr. Voici des descriptions concises pour chaque méthode de marquage à différentes échelles.
Méthodes de marquage à l'échelle macroscopique
- Peinture en aérosol : Un fin brouillard de peinture (par exemple, noir mat) est pulvérisé sur une couche de base contrastée (par exemple, blanc mat) pour créer un motif aléatoire de gouttelettes adapté à la DIC d'usage général.
- Marqueurs et tampons : Un motif de points aléatoires est appliqué manuellement avec des marqueurs pour des tests rapides ou transféré de manière cohérente à l'aide d'un tampon aléatoire préfabriqué.
Méthodes de marquage à l'échelle microscopique
- Dépôt de nanoparticules : Des nanoparticules en suspension dans un solvant sont appliquées à l'aérographe ou déposées sur une surface ; le solvant s'évapore pour laisser un motif de tavelures fin et aléatoire, idéal pour l'analyse par microscopie électronique à balayage (SEM).
- Photolithographie : Un revêtement sensible à la lumière est exposé à la lumière UV à travers un masque à motif aléatoire pour créer un motif de tavelures très précis et durable.
- Lithographie par faisceau d'électrons : Un faisceau focalisé d'électrons inscrit un motif aléatoire à ultra-haute résolution sur une couche de surface sensible, offrant un excellent contrôle de la taille des motifs.
- Gravure par faisceau d'ions focalisés (FIB) : Un faisceau d'ions à haute énergie grave physiquement un motif aléatoire directement dans la surface de l'échantillon, assurant une adhérence parfaite car le motif fait partie intégrante du matériau lui-même.
- Microstructure inhérente : Les caractéristiques naturelles propres au matériau, telles que les joints de grains métalliques ou les différentes phases, sont utilisées comme motif, éliminant ainsi le besoin de toute application artificielle.
Méthodes de marquage à l'échelle nanoscopique
- Nanoparticules auto-assemblées : Des nanoparticules ou des points quantiques sont chimiquement induits pour s'organiser en une monocouche aléatoire, créant un motif dense adapté à l'imagerie à l'échelle nanoscopique.
- Structure atomique/cristalline : Aux grossissements les plus élevés, le réseau atomique propre au matériau est imagé et utilisé comme motif, permettant la mesure directe de la déformation au niveau cristallin.
Le principe de base de la DIC consiste à capturer une image de référence de la surface mouchetée dans un état non déformé. À mesure que le corps se déforme, une série d'images est prise. Le logiciel DIC divise ensuite l'image de référence en sous-ensembles plus petits (facettes) et suit le mouvement de ces sous-ensembles dans les images suivantes du corps déformé en analysant le motif unique de niveaux de gris au sein de chacun d'eux. Ce suivi fournit une carte des déplacements, à partir de laquelle les champs de déformation peuvent être calculés.
Pour l'analyse de la déformation bidimensionnelle, une seule caméra peut être utilisée. Cependant, pour les surfaces complexes ou pour mesurer le déplacement hors plan, une configuration stéréo-DIC avec deux caméras est employée pour fournir des mesures tridimensionnelles.
À l'échelle macroscopique, bien que les jauges de déformation puissent offrir une précision plus élevée pour de très faibles déformations (par exemple, moins de 300 micro-déformations), la DIC constitue un outil puissant et complet pour comprendre le comportement mécanique en champ complet des matériaux et des structures.
- De George E. Dieter, Mechanical Metallugry (1961), 1ère édition, McGraw-Hill.↩︎