Vecteur traction ou vecteur contrainte
Considérez une surface imaginaire qui coupe un corps en deux parties.
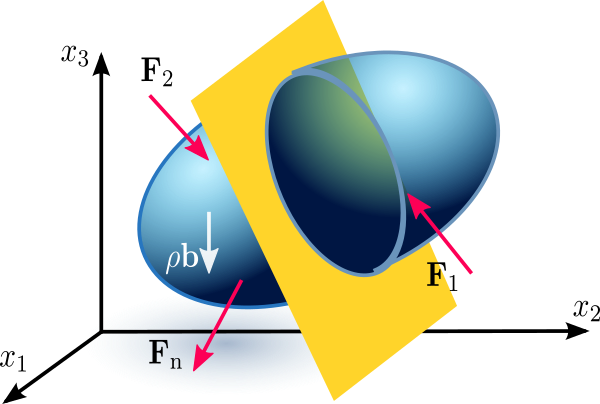
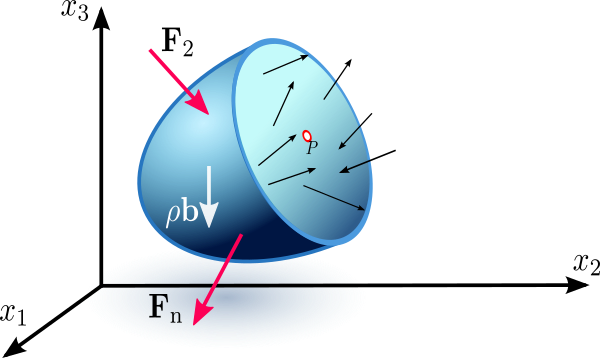
Le matériau d'un côté de la surface exerce un système de forces sur le matériau de l'autre côté.
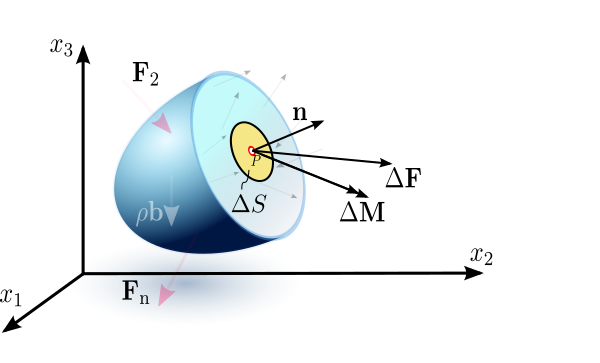
Sur un petit élément de surface entourant un point sur cette surface, la résultante de la distribution réelle de force sur cette surface est une force et un moment . Soit la normale unitaire sortante de la surface au point .
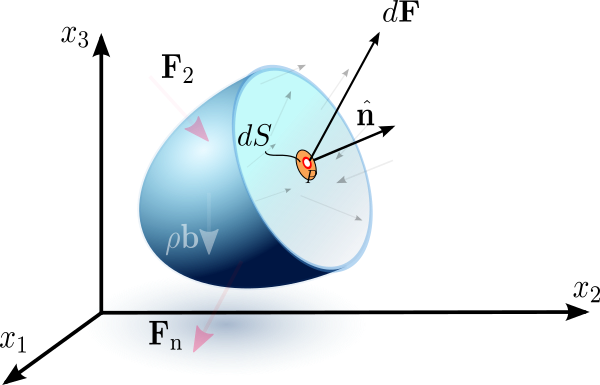
Maintenant, nous laissons tendre vers zéro autour de de telle sorte que sa plus grande dimension tende également vers zéro.1 Alors que et tendent également vers zéro, une hypothèse fondamentale de la mécanique des milieux continus est que le rapport approche une limite définie, tandis que l'effet du moment s'annule.2 Cette limite du rapport de force est appelée le vecteur traction ou vecteur contrainte, noté par :
Une hypothèse plus forte, connue sous le nom de postulat de Cauchy, est également formulée : le vecteur traction ne dépend que du point et de l'orientation de la surface, , et est indépendant de la forme de l'élément ou de la courbure de la surface. L'exposant signifie cette dépendance vis-à-vis du vecteur normal.3
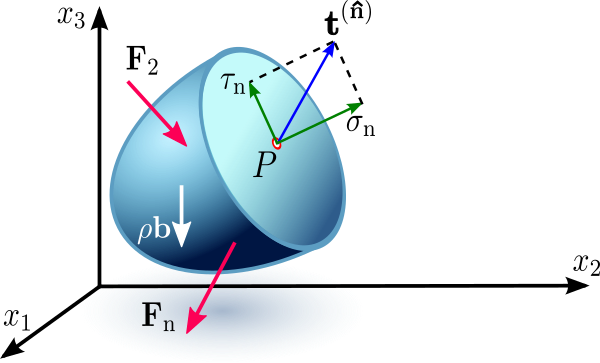
Le vecteur contrainte peut être décomposé en deux composantes : une contrainte normale qui est perpendiculaire à et une contrainte de cisaillement (ou contrainte de cisaillement) qui se situe dans le plan.
- Notez que est en contradiction avec le fait que les matériaux sont composés d'atomes et de molécules, mais gardez à l'esprit que (a) nous avons supposé que le matériau est continu et qu'il n'y a pas d'espace vide entre les particules. (b) La définition ci-dessus est très abstraite et n'est jamais utilisée en pratique.↩︎
- Une branche de la mécanique des milieux continus appelée théorie des contraintes de couple (ou théorie de Cosserat) explore les matériaux où ne tend pas vers zéro. Au lieu de cela, il tend vers une limite appelée le vecteur contrainte de couple, qui est important pour la modélisation de matériaux ayant une microstructure interne significative.↩︎
- Notez que est en contradiction avec le fait que les matériaux sont composés d'atomes et de molécules, mais gardez à l'esprit que (a) nous avons supposé que le matériau est continu et qu'il n'y a pas d'espace vide entre les particules. (b) La définition ci-dessus est très abstraite et n'est jamais utilisée en pratique.↩︎